Search Results (Searched for: )
- Tinine
- Tinine
21 Aug 2024 14:16
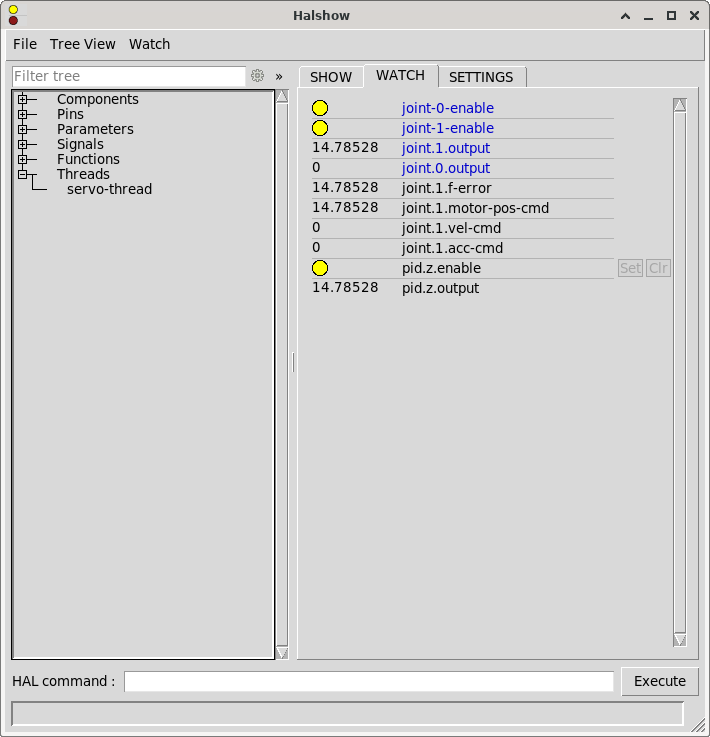
Replied by Tinine on topic PID Servo Loop rates
PID Servo Loop rates
Category: General LinuxCNC Questions
- Todd Zuercher

21 Aug 2024 14:10 - 21 Aug 2024 14:23
Replied by Todd Zuercher on topic What's the Oddest Machine You Have Powered with LinuxCNC
What's the Oddest Machine You Have Powered with LinuxCNC
Category: Off Topic and Test Posts
- PCW

21 Aug 2024 14:07
- Todd Zuercher
21 Aug 2024 13:57
Replied by Todd Zuercher on topic PID Servo Loop rates
PID Servo Loop rates
Category: General LinuxCNC Questions
- Tinine
- Tinine
21 Aug 2024 13:39
PID Servo Loop rates was created by Tinine
PID Servo Loop rates
Category: General LinuxCNC Questions
- mooser
- mooser
21 Aug 2024 13:37
Replied by mooser on topic Fuse for toroid transformer... sanity check
Fuse for toroid transformer... sanity check
Category: CNC Machines
- my1987toyota

21 Aug 2024 13:23
What's the Oddest Machine You Have Powered with LinuxCNC was created by my1987toyota
What's the Oddest Machine You Have Powered with LinuxCNC
Category: Off Topic and Test Posts
- slowpoke
- slowpoke
21 Aug 2024 13:07
- pawel77
- pawel77
21 Aug 2024 13:07
- Pickle
- Pickle
21 Aug 2024 12:02
Replied by Pickle on topic [ Vfdmod ] An easy VFD control over MODBUS RTU
[ Vfdmod ] An easy VFD control over MODBUS RTU
Category: HAL
- Aciera

21 Aug 2024 11:00
Replied by Aciera on topic Post GUI HAL not loading and "Bad character '[' used" error on E-Stop
Post GUI HAL not loading and "Bad character '[' used" error on E-Stop
Category: QtPyVCP
- TheRoslyak

21 Aug 2024 10:34 - 21 Aug 2024 10:35
- zmrdko

21 Aug 2024 09:44 - 21 Aug 2024 09:44
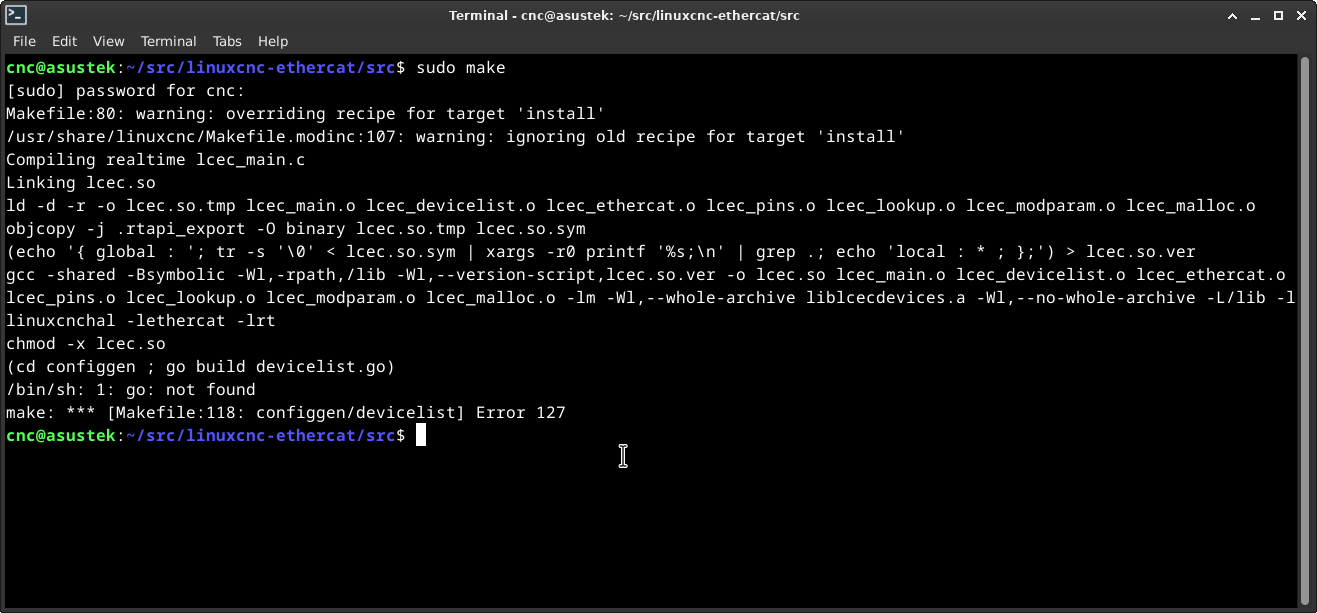
Replied by zmrdko on topic New LinuxCNC-Ethercat git tree
New LinuxCNC-Ethercat git tree
Category: EtherCAT
- greg23_78
- greg23_78
21 Aug 2024 09:34 - 21 Aug 2024 10:06
- avive
- avive
21 Aug 2024 09:15
Replied by avive on topic Message: "Ignoring task mode change while jogging"
Message: "Ignoring task mode change while jogging"
Category: GladeVCP
Time to create page: 0.496 seconds