Search Results (Searched for: )
- juergen-home
- juergen-home
11 Aug 2025 12:30
Replied by juergen-home on topic "pwm/dir" (Out1) switches for spindle CCW
"pwm/dir" (Out1) switches for spindle CCW
Category: Basic Configuration
... it is driven by a 6i25.
I have tried to invert, but that does not the trick for me. It inverts only the Relay signal for CCW but I need the action on CW.
I have tried to invert, but that does not the trick for me. It inverts only the Relay signal for CCW but I need the action on CW.
- Hartwig
- Hartwig
11 Aug 2025 12:22
Replied by Hartwig on topic Heidenhain EXE610 - which MESA board would be needed to connect 4 of them?
Heidenhain EXE610 - which MESA board would be needed to connect 4 of them?
Category: Driver Boards
I have checked the MESA 7i97T documentation and the Heidenhain (HDH) EXE outputs. My idea of the connections is shown in the picture,
#1 Is my idea correct?
#2 Unclear are the connections of the HDH pins 10, 11, and 12. Do you have an idea?
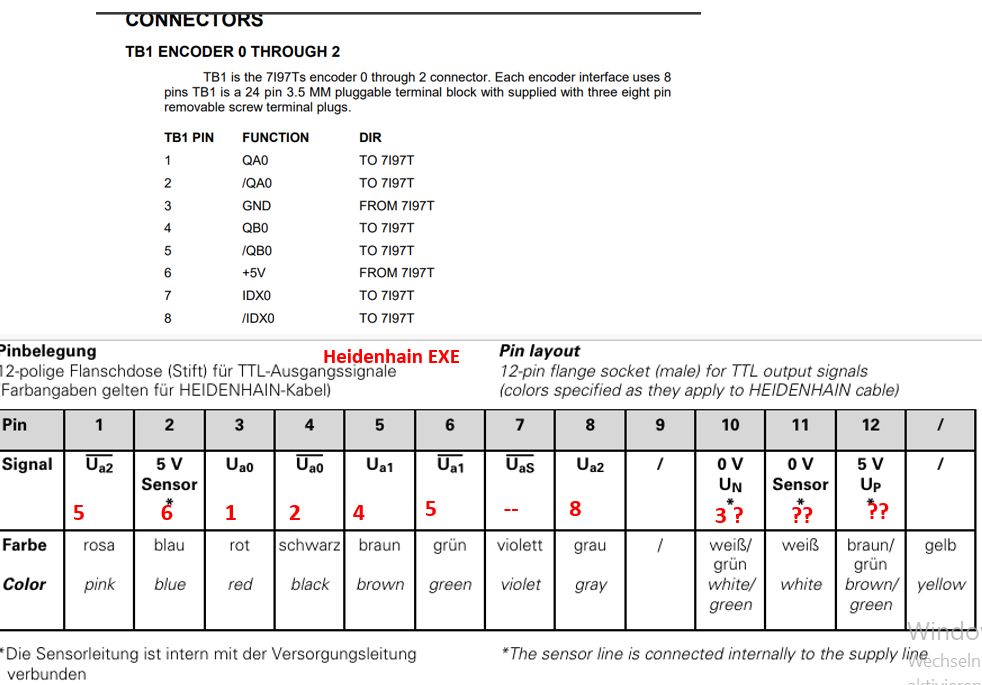
Thanks a lot and best regards
Hartwig
#1 Is my idea correct?
#2 Unclear are the connections of the HDH pins 10, 11, and 12. Do you have an idea?
Thanks a lot and best regards
Hartwig
- rodw

11 Aug 2025 12:15
Replied by rodw on topic "pwm/dir" (Out1) switches for spindle CCW
"pwm/dir" (Out1) switches for spindle CCW
Category: Basic Configuration
I've never used a parallel port. Do they have -not pins that are inverted for each pin? If not, there is a not component that inverts a pin.
linuxcnc.org/docs/stable/html/man/man9/not.9.html
linuxcnc.org/docs/stable/html/man/man9/not.9.html
- rodw
11 Aug 2025 12:07
Replied by rodw on topic Diving deeper into linuxcnc
Diving deeper into linuxcnc
Category: General LinuxCNC Questions
Go to the 2.94 docs and click down the HAL (Hardware Abstraction Layer) section to see how hal works
Then click on the button that says expand man pages
Take your time reading the man pages to learn what hal can do out of the box.
You only need to learn a bit of Python if you want to write or modify a GUI. Google has a very good Python course
Personally, Before tackling Python, I would learn how to write real time components using (a variant of) C and look at some examples in the linuxcnc source.
github.com/LinuxCNC/linuxcnc/tree/master/src/hal/components
copy a simple one like and2 and rewrite it into a different one like and3
Then click on the button that says expand man pages
Take your time reading the man pages to learn what hal can do out of the box.
You only need to learn a bit of Python if you want to write or modify a GUI. Google has a very good Python course
Personally, Before tackling Python, I would learn how to write real time components using (a variant of) C and look at some examples in the linuxcnc source.
github.com/LinuxCNC/linuxcnc/tree/master/src/hal/components
copy a simple one like and2 and rewrite it into a different one like and3
- juergen-home
- juergen-home
11 Aug 2025 12:05 - 11 Aug 2025 12:18
"pwm/dir" (Out1) switches for spindle CCW was created by juergen-home
"pwm/dir" (Out1) switches for spindle CCW
Category: Basic Configuration
Hi there
A question about my configuration:
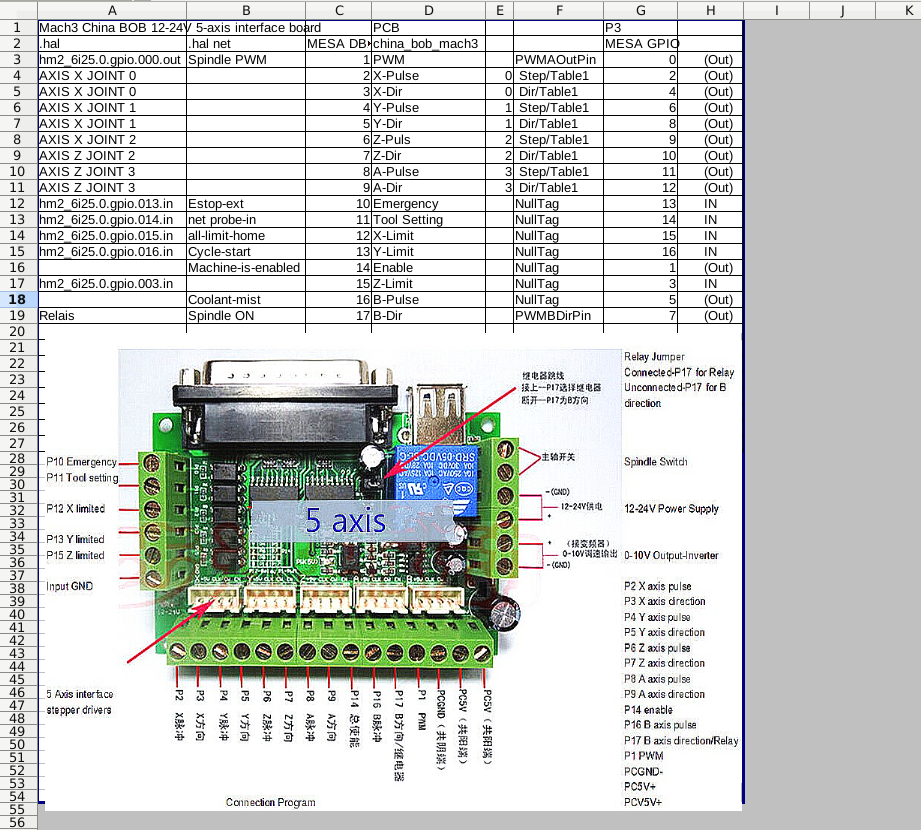
1. I have a HF milling spindle which needs only to turns clockwise. The PWM canal (Out0) works fine. My config for "pwm/dir" (Out1) is set to a relay output (P17/"GPIO7"). The relay should be on when CW is commanded but here it is on when CCW is commanded. How config it so that the relay switch on when CW is commanded?
Mesa 6i25 with homemade pin file
China BOB Mach3
Linuxcnc 2.8.4-1gb7824717b
A question about my configuration:
1. I have a HF milling spindle which needs only to turns clockwise. The PWM canal (Out0) works fine. My config for "pwm/dir" (Out1) is set to a relay output (P17/"GPIO7"). The relay should be on when CW is commanded but here it is on when CCW is commanded. How config it so that the relay switch on when CW is commanded?
Mesa 6i25 with homemade pin file
China BOB Mach3
Linuxcnc 2.8.4-1gb7824717b
# Erstellt von PNCconf am Mon May 1 19:24:03 2023
# Verwendete LinuxCNC version: Master (2.9)
# Änderungen an dieser Datei werden beim nächsten
# wird überschrieben sobald Sie PNCconf erneut ausführen
#2.8.4
loadrt [KINS]KINEMATICS
loadrt [EMCMOT]EMCMOT servo_period_nsec=[EMCMOT]SERVO_PERIOD num_joints=[KINS]JOINTS
loadrt hostmot2
loadrt hm2_pci config="num_encoders=5 num_pwmgens=1 num_stepgens=4 sserial_port_0=0xxxxxxx"
#loadrt hm2_pci config="num_encoders=5 num_pwmgens=1 num_stepgens=3 sserial_port_0=0xxxxxxx"
# firmware=hm2/Discovered:6i25/~/mesa0_discovered.xml.BIT
setp hm2_6i25.0.pwmgen.pwm_frequency 1000
setp hm2_6i25.0.pwmgen.pdm_frequency 6000000
setp hm2_6i25.0.watchdog.timeout_ns 5000000
loadrt pid names=pid.x,pid.y,pid.z,pid.a,pid.s
# lut5: look up table für all-limit-home (because of problem with linit stop detection by other axes when homing)
loadrt lut5 names=lut_homing
addf lut_homing servo-thread
setp lut_homing.function 0x10000
net all-limit-home => lut_homing.in-4
net all-limit <= lut_homing.out
net homing-x <= joint.0.homing => lut_homing.in-0
net homing-y <= joint.1.homing => lut_homing.in-1
net homing-z <= joint.2.homing => lut_homing.in-2
##setp lut_homing.in-3 0
##net homing-a <= joint.2.homing => lut_homing.in-3
addf hm2_6i25.0.read servo-thread
addf motion-command-handler servo-thread
addf motion-controller servo-thread
addf pid.x.do-pid-calcs servo-thread
addf pid.y.do-pid-calcs servo-thread
addf pid.z.do-pid-calcs servo-thread
addf pid.a.do-pid-calcs servo-thread
addf pid.s.do-pid-calcs servo-thread
addf hm2_6i25.0.write servo-thread
setp hm2_6i25.0.dpll.01.timer-us -50
setp hm2_6i25.0.stepgen.timer-number 1
# extern signal input
# --- MACHINE-IS-ENABLED ---
#gpio.001 MESA DB25 PIN PIN 14
setp hm2_6i25.0.gpio.001.is_output true
net machine-is-enabled => hm2_6i25.0.gpio.001.out
# --- COOLANT-MIST ---
#gpio.005 MESA DB25 PIN PIN 16
setp hm2_6i25.0.gpio.005.is_output true
#net coolant-mist => hm2_6i25.0.gpio.005.out
# externe signal output
# --- ESTOP-EXT ---
#gpio.013 MESA DB25 PIN PIN 10
# .in_not for NC / .in for NO Limit Switch
net estop-ext <= hm2_6i25.0.gpio.013.in_not
#net estop-ext <= hm2_6i25.0.gpio.013.in
# --- PROBE-IN ---
# -wird in Probe_postgui.hal verwendet / definiert -
#gpio.014 MESA DB25 PIN PIN 11
#net probe-in <= hm2_6i25.0.gpio.014.in
# --- ALL-LIMIT-HOME ---
# gpio.015 MESA DB25 PIN PIN 12
# .in_not for NO / .in for NC Limit Switch
net all-limit-home <= hm2_6i25.0.gpio.015.in_not
#net all-limit-home <= hm2_6i25.0.gpio.015.in
# --- CYCLE-START ---
#gpio.016 MESA DB25 PIN PIN 13
#net cycle-start <= hm2_6i25.0.gpio.016.in
#*******************
# AXIS X JOINT 0
#*******************
setp pid.x.Pgain [JOINT_0]P
setp pid.x.Igain [JOINT_0]I
setp pid.x.Dgain [JOINT_0]D
setp pid.x.bias [JOINT_0]BIAS
setp pid.x.FF0 [JOINT_0]FF0
setp pid.x.FF1 [JOINT_0]FF1
setp pid.x.FF2 [JOINT_0]FF2
setp pid.x.deadband [JOINT_0]DEADBAND
setp pid.x.maxoutput [JOINT_0]MAX_OUTPUT
setp pid.x.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.x.maxerror 0.012700
#net x-index-enable => pid.x.index-enable
#net x-enable => pid.x.enable
#net x-pos-cmd => pid.x.command
#net x-pos-fb => pid.x.feedback
#net x-output <= pid.x.output
# Step-Gen Signal/Setup
setp hm2_6i25.0.stepgen.00.dirsetup [JOINT_0]DIRSETUP
setp hm2_6i25.0.stepgen.00.dirhold [JOINT_0]DIRHOLD
setp hm2_6i25.0.stepgen.00.steplen [JOINT_0]STEPLEN
setp hm2_6i25.0.stepgen.00.stepspace [JOINT_0]STEPSPACE
setp hm2_6i25.0.stepgen.00.position-scale [JOINT_0]STEP_SCALE
setp hm2_6i25.0.stepgen.00.step_type 0
#setp hm2_6i25.0.stepgen.00.control-type 1
setp hm2_6i25.0.stepgen.00.control-type 0
setp hm2_6i25.0.stepgen.00.maxaccel [JOINT_0]STEPGEN_MAXACCEL
setp hm2_6i25.0.stepgen.00.maxvel [JOINT_0]STEPGEN_MAXVEL
#-closed loop umgehen (von sim-maschine)
net x-pos-fb joint.0.motor-pos-fb <= hm2_6i25.0.stepgen.00.position-fb
net x-pos-cmd joint.0.motor-pos-cmd => hm2_6i25.0.stepgen.00.position-cmd
net x-enable joint.0.amp-enable-out => hm2_6i25.0.stepgen.00.enable
# ---Closed-Loop Schrittmotor-Signale---
#net x-pos-cmd <= joint.0.motor-pos-cmd
#net x-vel-cmd <= joint.0.vel-cmd
#net x-output => hm2_6i25.0.stepgen.00.velocity-cmd
#net x-pos-fb <= hm2_6i25.0.stepgen.00.position-fb
#net x-pos-fb => joint.0.motor-pos-fb
#net x-enable <= joint.0.amp-enable-out
#net x-enable => hm2_6i25.0.stepgen.00.enable
# ---Einrichtung Referenzfahrt / Signale der Endschalter---
net all-limit-home => joint.0.home-sw-in
net all-limit => joint.0.neg-lim-sw-in
net all-limit => joint.0.pos-lim-sw-in
#*******************
# AXIS Y JOINT 1
#*******************
setp pid.y.Pgain [JOINT_1]P
setp pid.y.Igain [JOINT_1]I
setp pid.y.Dgain [JOINT_1]D
setp pid.y.bias [JOINT_1]BIAS
setp pid.y.FF0 [JOINT_1]FF0
setp pid.y.FF1 [JOINT_1]FF1
setp pid.y.FF2 [JOINT_1]FF2
setp pid.y.deadband [JOINT_1]DEADBAND
setp pid.y.maxoutput [JOINT_1]MAX_OUTPUT
setp pid.y.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.y.maxerror 0.012700
#net y-index-enable => pid.y.index-enable
#net y-enable => pid.y.enable
#net y-pos-cmd => pid.y.command
#net y-pos-fb => pid.y.feedback
#net y-output <= pid.y.output
# Schritt-Gen Signale/Setup
#setp hm2_6i25.0.gpio.003.invert_output true
setp hm2_6i25.0.stepgen.01.dirsetup [JOINT_1]DIRSETUP
setp hm2_6i25.0.stepgen.01.dirhold [JOINT_1]DIRHOLD
setp hm2_6i25.0.stepgen.01.steplen [JOINT_1]STEPLEN
setp hm2_6i25.0.stepgen.01.stepspace [JOINT_1]STEPSPACE
setp hm2_6i25.0.stepgen.01.position-scale [JOINT_1]STEP_SCALE
setp hm2_6i25.0.stepgen.01.step_type 0
#setp hm2_6i25.0.stepgen.01.control-type 1
setp hm2_6i25.0.stepgen.01.control-type 0
setp hm2_6i25.0.stepgen.01.maxaccel [JOINT_1]STEPGEN_MAXACCEL
setp hm2_6i25.0.stepgen.01.maxvel [JOINT_1]STEPGEN_MAXVEL
#-closed loop umgehen (von sim-maschine)
net y-pos-fb joint.1.motor-pos-fb <= hm2_6i25.0.stepgen.01.position-fb
net y-pos-cmd joint.1.motor-pos-cmd => hm2_6i25.0.stepgen.01.position-cmd
net y-enable joint.1.amp-enable-out => hm2_6i25.0.stepgen.01.enable
# ---Closed-Loop Schrittmotor-Signale---
#net y-pos-cmd <= joint.1.motor-pos-cmd
#net y-vel-cmd <= joint.1.vel-cmd
#net y-output => hm2_6i25.0.stepgen.01.velocity-cmd
#net y-pos-fb <= hm2_6i25.0.stepgen.01.position-fb
#net y-pos-fb => joint.1.motor-pos-fb
#net y-enable <= joint.1.amp-enable-out
#net y-enable => hm2_6i25.0.stepgen.01.enable
# ---Einrichtung Referenzfahrt / Signale der Endschalter---
net all-limit-home => joint.1.home-sw-in
net all-limit => joint.1.neg-lim-sw-in
net all-limit => joint.1.pos-lim-sw-in
#*******************
# AXIS Z JOINT 2
#*******************
setp pid.z.Pgain [JOINT_2]P
setp pid.z.Igain [JOINT_2]I
setp pid.z.Dgain [JOINT_2]D
setp pid.z.bias [JOINT_2]BIAS
setp pid.z.FF0 [JOINT_2]FF0
setp pid.z.FF1 [JOINT_2]FF1
setp pid.z.FF2 [JOINT_2]FF2
setp pid.z.deadband [JOINT_2]DEADBAND
setp pid.z.maxoutput [JOINT_2]MAX_OUTPUT
setp pid.z.error-previous-target true
# This setting is to limit bogus stepgen
# velocity corrections caused by position
# feedback sample time jitter.
setp pid.z.maxerror 0.012700
#net z-index-enable => pid.z.index-enable
#net z-enable => pid.z.enable
#net z-pos-cmd => pid.z.command
#net z-pos-fb => pid.z.feedback
#net z-output <= pid.z.output
# Schritt-Gen Signale/Setup
setp hm2_6i25.0.gpio.003.invert_output true
setp hm2_6i25.0.stepgen.02.dirsetup [JOINT_2]DIRSETUP
setp hm2_6i25.0.stepgen.02.dirhold [JOINT_2]DIRHOLD
setp hm2_6i25.0.stepgen.02.steplen [JOINT_2]STEPLEN
setp hm2_6i25.0.stepgen.02.stepspace [JOINT_2]STEPSPACE
setp hm2_6i25.0.stepgen.02.position-scale [JOINT_2]STEP_SCALE
setp hm2_6i25.0.stepgen.02.step_type 0
#setp hm2_6i25.0.stepgen.02.control-type 1
setp hm2_6i25.0.stepgen.02.control-type 0
setp hm2_6i25.0.stepgen.02.maxaccel [JOINT_2]STEPGEN_MAXACCEL
setp hm2_6i25.0.stepgen.02.maxvel [JOINT_2]STEPGEN_MAXVEL
#-closed loop umgehen (von sim-maschine)
net z-pos-fb joint.2.motor-pos-fb <= hm2_6i25.0.stepgen.02.position-fb
net z-pos-cmd joint.2.motor-pos-cmd => hm2_6i25.0.stepgen.02.position-cmd
net z-enable joint.2.amp-enable-out => hm2_6i25.0.stepgen.02.enable
# ---Closed-Loop Schrittmotor-Signale---
#net z-pos-cmd <= joint.2.motor-pos-cmd
#net z-vel-cmd <= joint.2.vel-cmd
#net z-output => hm2_6i25.0.stepgen.02.velocity-cmd
#net z-pos-fb <= hm2_6i25.0.stepgen.02.position-fb
#net z-pos-fb => joint.2.motor-pos-fb
#net z-enable <= joint.2.amp-enable-out
#net z-enable => hm2_6i25.0.stepgen.02.enable
# ---Einrichtung Referenzfahrt / Signale der Endschalter---
net all-limit-home => joint.2.home-sw-in
net all-limit => joint.2.neg-lim-sw-in
net all-limit => joint.2.pos-lim-sw-in
#*******************
# AXIS A JOINT 3
#*******************
#*******************
# SPINDEL
#*******************
setp pid.s.Pgain [SPINDLE_0]P
setp pid.s.Igain [SPINDLE_0]I
setp pid.s.Dgain [SPINDLE_0]D
setp pid.s.bias [SPINDLE_0]BIAS
setp pid.s.FF0 [SPINDLE_0]FF0
setp pid.s.FF1 [SPINDLE_0]FF1
setp pid.s.FF2 [SPINDLE_0]FF2
setp pid.s.deadband [SPINDLE_0]DEADBAND
setp pid.s.maxoutput [SPINDLE_0]MAX_OUTPUT
setp pid.s.error-previous-target true
#net spindle-index-enable => pid.s.index-enable
#net spindle-enable => pid.s.enable
#net spindle-vel-cmd-rpm-abs => pid.s.command
#net spindle-vel-fb-rpm-abs => pid.s.feedback
#net spindle-output <= pid.s.output
# ---PWM Generator Signale/Setup---
setp hm2_6i25.0.pwmgen.00.output-type 1
setp hm2_6i25.0.pwmgen.00.scale [SPINDLE_0]OUTPUT_SCALE
# Invert the DIR signal
#setp hm2_6i25.0.gpio.007.invert_output true
# invert the PWM signal
setp hm2_6i25.0.gpio.000.invert_output true
#--- SPINDLE-ENABLE ---
net spindle-vel-cmd-rpm => hm2_6i25.0.pwmgen.00.value
net spindle-enable => hm2_6i25.0.pwmgen.00.enable
net spindle-enable => hm2_6i25.0.gpio.005.out
# ---Setup Spindel Steuerungs-Signale---
net spindle-vel-cmd-rps <= spindle.0.speed-out-rps
net spindle-vel-cmd-rps-abs <= spindle.0.speed-out-rps-abs
net spindle-vel-cmd-rpm <= spindle.0.speed-out
net spindle-vel-cmd-rpm-abs <= spindle.0.speed-out-abs
net spindle-enable <= spindle.0.on
net spindle-cw <= spindle.0.forward
net spindle-ccw <= spindle.0.reverse
net spindle-brake <= spindle.0.brake
net spindle-revs => spindle.0.revs
net spindle-at-speed => spindle.0.at-speed
net spindle-vel-fb-rps => spindle.0.speed-in
net spindle-index-enable <=> spindle.0.index-enable
# ---Einrichtung der Signale zur Spindel-Geschwindigkeits-Steuerung---
sets spindle-at-speed true
#******************************
# Verbinden verschiedener Signale
#******************************
# ---HALUI Signale---
# xhc: net axis-select-x halui.axis.x.select
# net jog-x-pos halui.axis.x.plus
# net jog-x-neg halui.axis.x.minus
net jog-x-analog halui.axis.x.analog
# xhc: net x-is-homed halui.joint.0.is-homed
# xhc: net axis-select-y halui.axis.y.select
# net jog-y-pos halui.axis.y.plus
# net jog-y-neg halui.axis.y.minus
net jog-y-analog halui.axis.y.analog
#net y-is-homed halui.joint.1.is-homed
# xhc: net axis-select-z halui.axis.z.select
# net jog-z-pos halui.axis.z.plus
# net jog-z-neg halui.axis.z.minus
net jog-z-analog halui.axis.z.analog
#net z-is-homed halui.joint.2.is-homed
net axis-select-a halui.axis.a.select
net jog-a-pos halui.axis.a.plus
net jog-a-neg halui.axis.a.minus
net jog-a-analog halui.axis.a.analog
#net a-is-homed halui.joint.3.is-homed
net jog-selected-pos halui.axis.selected.plus
net jog-selected-neg halui.axis.selected.minus
net spindle-manual-cw halui.spindle.0.forward
net spindle-manual-ccw halui.spindle.0.reverse
net spindle-manual-stop halui.spindle.0.stop
# xhc: net machine-is-on halui.machine.is-on
# net jog-speed halui.axis.jog-speed
# xhc: net MDI-mode halui.mode.is-mdi
# xhc: net cycle-start halui.program.run
# net abort halui.abort
# ---Kühlmittel-Signale---
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
# ---Sonde/Taster Signal (probe signal)---
# easyprobe net probe-in => motion.probe-input
# ---Signale zur Bewegungs-Steuerung---
net in-position <= motion.in-position
net machine-is-enabled <= motion.motion-enabled
# ---Digitale ein-/ausgehende-Signale---
# ---E-Stop--
net estop-out <= iocontrol.0.user-enable-out
net estop-ext => iocontrol.0.emc-enable-in
# ---signal manual toolchange---
net tool-change-request <= iocontrol.0.tool-change
net tool-change-confirmed => iocontrol.0.tool-changed
net tool-number <= iocontrol.0.tool-prep-number
# ---use extern dialog for toolchange---
loadusr -W hal_manualtoolchange
net tool-change-request => hal_manualtoolchange.change
net tool-change-confirmed <= hal_manualtoolchange.changed
net tool-number => hal_manualtoolchange.number
# ---ignoriere Anfragen zu Werkzeug-Vorbereitungen---
net tool-prepare-loopback iocontrol.0.tool-prepare => iocontrol.0.tool-prepared# Erstellt von PNCconf am Mon May 1 19:24:03 2023
# Verwendete LinuxCNC version: Master (2.9)
#2.8.4
# reduced to bare minimum 2025-08-10 #aa
[EMC]
MACHINE = ttm_a
DEBUG = 0
VERSION = 1.1
[DISPLAY]
DISPLAY = axis
POSITION_OFFSET = RELATIVE
POSITION_FEEDBACK = ACTUAL
MAX_FEED_OVERRIDE = 3.000000
MAX_SPINDLE_OVERRIDE = 1.500000
MIN_SPINDLE_OVERRIDE = 0.500000
INTRO_GRAPHIC = linuxcnc.gif
INTRO_TIME = 5
PROGRAM_PREFIX = /home/cnc/linuxcnc/nc_files/ngc
OPEN_FILE=""
INCREMENTS = .1mm .05mm .01mm .005mm
#POSITION_FEEDBACK = ACTUAL
DEFAULT_LINEAR_VELOCITY = 8.3333
MAX_LINEAR_VELOCITY = 90
MIN_LINEAR_VELOCITY = 0.100000
DEFAULT_ANGULAR_VELOCITY = 12.000000
MAX_ANGULAR_VELOCITY = 180.000000
MIN_ANGULAR_VELOCITY = 1.666667
EDITOR = geany
#GEOMETRY = xyza
GEOMETRY = xyz
PYVCP = custompanel.xml
[FILTER]
PROGRAM_EXTENSION = .png,.gif,.jpg Greyscale Depth Image
PROGRAM_EXTENSION = .py Python Script
png = image-to-gcode
gif = image-to-gcode
jpg = image-to-gcode
py = python
[TASK]
TASK = milltask
CYCLE_TIME = 0.010
[RS274NGC]
PARAMETER_FILE = linuxcnc.var
RS274NGC_STARTUP_CODE = G21 G40 G90 G94 G97 G64 P0.025
#SUBROUTINE_PATH = /home/cnc/linuxcnc/nc_files/ngc/sub
SUBROUTINE_PATH = ./sub
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
[HMOT]
# **** Nur zur Information ****
CARD0=hm2_6i25.0
[HAL]
HALUI = halui
HALFILE = ttm_a.hal
HALFILE = custom.hal
POSTGUI_HALFILE = custom_postgui.hal
SHUTDOWN = shutdown.hal
[HALUI]
# midi 0-->26 (27)
#custom_postgui.hal
# midi 0-->26
MDI_COMMAND = m3 s2000
MDI_COMMAND = m3 s3000
MDI_COMMAND = m3 s4000
MDI_COMMAND = m3 s5000
MDI_COMMAND = m3 s6000
MDI_COMMAND = m3 s7000
MDI_COMMAND = m3 s8000
MDI_COMMAND = m3 s9000
MDI_COMMAND = m3 s10000
MDI_COMMAND = m3 s11000
MDI_COMMAND = m3 s12000
MDI_COMMAND = m3 s13000
MDI_COMMAND = m3 s14000
MDI_COMMAND = m3 s16000
MDI_COMMAND = m3 s18000
MDI_COMMAND = m3 s20000
MDI_COMMAND = m3 s22000
MDI_COMMAND = m3 s24000
# midi 18-28
MDI_COMMAND = g0 x0 y0
MDI_COMMAND = O<midi_com1> CALL
MDI_COMMAND = O<midi_com2> CALL
MDI_COMMAND = O<midi_com3> CALL
MDI_COMMAND = O<midi_com4> CALL
MDI_COMMAND = O<midi_com5> CALL
MDI_COMMAND = O<midi_go_tool_probe> CALL
MDI_COMMAND = O<midi_go_tool_change_pos> CALL
MDI_COMMAND = O<midi_set_tool_length> CALL
MDI_COMMAND = O<midi_load_tool> CALL
MDI_COMMAND = M5 M9
#29
#/custom_postgui.hal
[KINS]
#JOINTS = 4
JOINTS = 3
#KINEMATICS = trivkins coordinates=XYZA
KINEMATICS = trivkins coordinates=XYZ
[TRAJ]
#COORDINATES = XYZA
COORDINATES = XYZ
MAX_ANGULAR_VELOCITY = 360.00
DEFAULT_ANGULAR_VELOCITY = 36.00
LINEAR_UNITS = mm
ANGULAR_UNITS = degree
DEFAULT_LINEAR_VELOCITY = 2.50
MAX_LINEAR_VELOCITY = 90
[EMCIO]
EMCIO = io
CYCLE_TIME = 0.100
TOOL_TABLE = tool.tbl
#******************************************
[AXIS_X]
MAX_VELOCITY = 50
MAX_ACCELERATION = 1500
#MIN_LIMIT =-255
MIN_LIMIT =-190
MAX_LIMIT =0
[JOINT_0]
TYPE = LINEAR
HOME = -1
FERROR = 0.01
MIN_FERROR = 10
MAX_VELOCITY =50
MAX_ACCELERATION = 1500
# Die folgenden Werte sollten 25% größer sein als MAX_VELOCITY und MAX_ACCELERATION
# Bei Verwendung der UMKEHRSPIEL-Kompensation sollte STEPGEN_MAXACCEL um 100% größer sein.
#STEPGEN_MAXVEL = 62.5
#STEPGEN_MAXACCEL = 187.5
STEPGEN_MAXVEL = 200
STEPGEN_MAXACCEL = 1875
P = 1000
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 0
MAX_OUTPUT = 0
# diese sind in Nanosekunden
DIRSETUP = 3000
DIRHOLD = 3000
STEPLEN = 2000
STEPSPACE = 1000
#STEP_SCALE = 160
STEP_SCALE = 250
MIN_LIMIT = -190
MAX_LIMIT = 0
#HOME_OFFSET = 3
#HOME_SEARCH_VEL =30
#HOME_LATCH_VEL = 5
HOME_FINAL_VEL = 0
#HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_IS_SHARED = 1
#HOME_SEQUENCE = 2
#4.5.6.14 Immediate Homing
HOME_SEARCH_VEL = 0
HOME_LATCH_VEL = 0
HOME_USE_INDEX = NO
HOME_OFFSET = 0
HOME_SEQUENCE = 0
#******************************************
[AXIS_Y]
MAX_VELOCITY = 50
MAX_ACCELERATION = 1500
MIN_LIMIT =0
MAX_LIMIT =120
[JOINT_1]
TYPE = LINEAR
HOME = 1
FERROR = 0.01
MIN_FERROR = 10
MAX_VELOCITY =50
MAX_ACCELERATION = 1500
# Die folgenden Werte sollten 25% größer sein als MAX_VELOCITY und MAX_ACCELERATION
# Bei Verwendung der UMKEHRSPIEL-Kompensation sollte STEPGEN_MAXACCEL um 100% größer sein.
STEPGEN_MAXVEL = 200
STEPGEN_MAXACCEL = 1875
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# diese sind in Nanosekunden
DIRSETUP = 3000
DIRHOLD = 3000
STEPLEN = 2000
STEPSPACE = 1000
# original: STEP_SCALE = -160
STEP_SCALE = -160
MIN_LIMIT = 0
MAX_LIMIT = 120
# HOME_OFFSET = -3
#HOME_OFFSET = -1
# HOME_SEARCH_VEL = -5
#HOME_SEARCH_VEL = -20
#HOME_LATCH_VEL = -5
HOME_FINAL_VEL = 0
#HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_IS_SHARED = 1
#HOME_SEQUENCE = 3
#4.5.6.14 Immediate Homing
HOME_SEARCH_VEL = 0
HOME_LATCH_VEL = 0
HOME_USE_INDEX = NO
HOME_OFFSET = 0
HOME_SEQUENCE = 0
#******************************************
[AXIS_Z]
MAX_VELOCITY = 50
MAX_ACCELERATION = 1500
MIN_LIMIT =-210
MAX_LIMIT =0
[JOINT_2]
TYPE = LINEAR
HOME = -2
FERROR = 0.01
MIN_FERROR = 10
MAX_VELOCITY =50
MAX_ACCELERATION = 1500
# Die folgenden Werte sollten 25% größer sein als MAX_VELOCITY und MAX_ACCELERATION
# Bei Verwendung der UMKEHRSPIEL-Kompensation sollte STEPGEN_MAXACCEL um 100% größer sein.
STEPGEN_MAXVEL = 100
STEPGEN_MAXACCEL = 1875
P = 1000.0
I = 0.0
D = 0.0
FF0 = 0.0
FF1 = 1.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 0.0
# diese sind in Nanosekunden
DIRSETUP = 3000
DIRHOLD = 3000
STEPLEN = 2000
STEPSPACE = 1000
STEP_SCALE = 160
MIN_LIMIT = -210
#HOME_OFFSET = 2
#HOME_SEARCH_VEL =40
#HOME_LATCH_VEL = 5
HOME_FINAL_VEL = 0
#HOME_USE_INDEX = NO
HOME_IGNORE_LIMITS = YES
HOME_IS_SHARED = 1
#HOME_SEQUENCE = 1
#4.5.6.14 Immediate Homing
HOME_SEARCH_VEL = 0
HOME_LATCH_VEL = 0
HOME_USE_INDEX = NO
HOME_OFFSET = 0
HOME_SEQUENCE = 0
#******************************************
[SPINDLE_0]
P = 0.0
I = 0.0
D = 0.0
FF0 = 1.0
FF1 = 0.0
FF2 = 0.0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 24000
OUTPUT_SCALE = 24000
OUTPUT_MIN_LIMIT = 0
OUTPUT_MAX_LIMIT = 24000
MAX_VELOCITY = 24000
MIN_VELOCITY = 0
INCREMENT = 1000
DEFAULT_SPINDLE_0_SPEED = 1000
#MAX_REVERSE_VELOCITY = 2400
#MIN_REVERSE_VELOCITY = 100
#******************************************Configuration Name: HOSTMOT2
General configuration information:
BoardName : MESA6I25
FPGA Size: 9 KGates
FPGA Pins: 144
Number of IO Ports: 2
Width of one I/O port: 17
Clock Low frequency: 66.6667 MHz
Clock High frequency: 200.0000 MHz
IDROM Type: 3
Instance Stride 0: 4
Instance Stride 1: 64
Register Stride 0: 256
Register Stride 1: 256
Modules in configuration:
Module: DPLL
There are 1 of DPLL in configuration
Version: 0
Registers: 7
BaseAddress: 7000
ClockFrequency: 66.667 MHz
Register Stride: 256 bytes
Instance Stride: 4 bytes
Module: WatchDog
There are 1 of WatchDog in configuration
Version: 0
Registers: 3
BaseAddress: 0C00
ClockFrequency: 66.667 MHz
Register Stride: 256 bytes
Instance Stride: 4 bytes
Module: IOPort
There are 2 of IOPort in configuration
Version: 0
Registers: 5
BaseAddress: 1000
ClockFrequency: 66.667 MHz
Register Stride: 256 bytes
Instance Stride: 4 bytes
Module: PWM
There are 1 of PWM in configuration
Version: 0
Registers: 5
BaseAddress: 4100
ClockFrequency: 200.000 MHz
Register Stride: 256 bytes
Instance Stride: 4 bytes
Module: QCount
There are 5 of QCount in configuration
Version: 2
Registers: 5
BaseAddress: 3000
ClockFrequency: 66.667 MHz
Register Stride: 256 bytes
Instance Stride: 4 bytes
Module: SSerial
There are 1 of SSerial in configuration
Version: 0
Registers: 6
BaseAddress: 5B00
ClockFrequency: 66.667 MHz
Register Stride: 256 bytes
Instance Stride: 64 bytes
Module: StepGen
There are 4 of StepGen in configuration
Version: 2
Registers: 10
BaseAddress: 2000
ClockFrequency: 66.667 MHz
Register Stride: 256 bytes
Instance Stride: 4 bytes
Module: LED
There are 1 of LED in configuration
Version: 0
Registers: 1
BaseAddress: 0200
ClockFrequency: 66.667 MHz
Register Stride: 256 bytes
Instance Stride: 4 bytes
Configuration pin-out:
IO Connections for P3
Pin# I/O Pri. func Sec. func Chan Pin func Pin Dir
1 0 IOPort PWM 0 PWM (Out)
14 1 IOPort None
2 2 IOPort StepGen 0 Step/Table1 (Out)
15 3 IOPort None
3 4 IOPort StepGen 0 Dir/Table2 (Out)
16 5 IOPort None
4 6 IOPort StepGen 1 Step/Table1 (Out)
17 7 IOPort PWM 0 Dir (Out)
5 8 IOPort StepGen 1 Dir/Table2 (Out)
6 9 IOPort StepGen 2 Step/Table1 (Out)
7 10 IOPort StepGen 2 Dir/Table2 (Out)
8 11 IOPort StepGen 3 Step/Table1 (Out)
9 12 IOPort StepGen 3 Dir/Table2 (Out)
10 13 IOPort None
11 14 IOPort None
12 15 IOPort None
13 16 IOPort None
IO Connections for P2
Pin# I/O Pri. func Sec. func Chan Pin func Pin Dir
1 17 IOPort QCount 0 Quad-A (In)
14 18 IOPort QCount 4 Quad-B (In)
2 19 IOPort QCount 0 Quad-B (In)
15 20 IOPort QCount 4 Quad-IDX (In)
3 21 IOPort QCount 0 Quad-IDX (In)
16 22 IOPort SSerial 0 TXData0 (Out)
4 23 IOPort QCount 1 Quad-A (In)
17 24 IOPort SSerial 0 RXData0 (In)
5 25 IOPort QCount 1 Quad-B (In)
6 26 IOPort QCount 1 Quad-IDX (In)
7 27 IOPort QCount 2 Quad-A (In)
8 28 IOPort QCount 2 Quad-B (In)
9 29 IOPort QCount 2 Quad-IDX (In)
10 30 IOPort QCount 3 Quad-A (In)
11 31 IOPort QCount 3 Quad-B (In)
12 32 IOPort QCount 3 Quad-IDX (In)
13 33 IOPort QCount 4 Quad-A (In)- Hartwig
- Hartwig
11 Aug 2025 12:03
Replied by Hartwig on topic New member from Germany - CNC retrofit of a Leinen FM1
New member from Germany - CNC retrofit of a Leinen FM1
Category: General LinuxCNC Questions
Here two pictures of the PCB board, which receives all the signals from the Heidenhain TNC113.
Clearly a prototype and it would be extremely difficult to perform a re-engineering and create the circuit diagram.
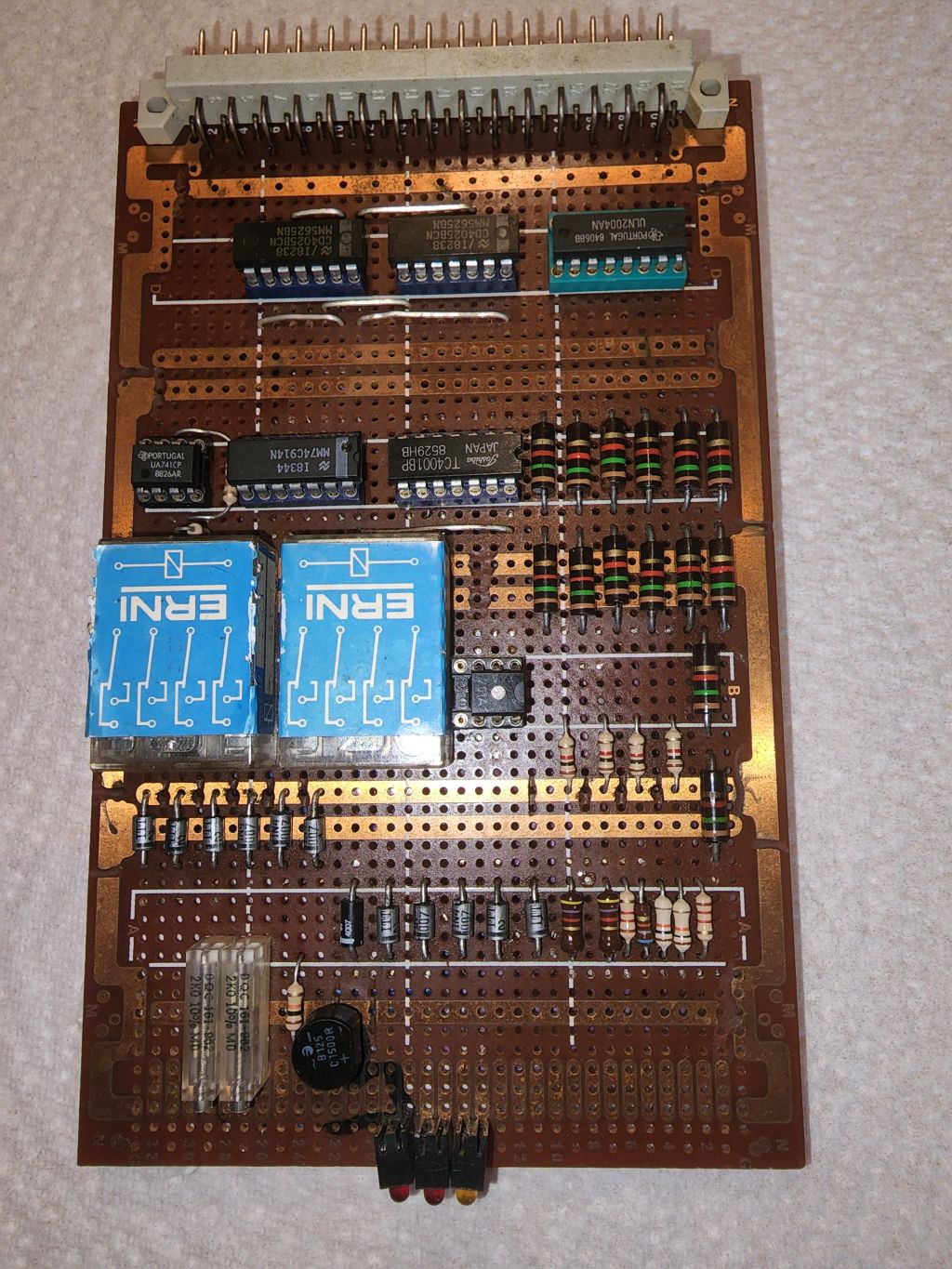
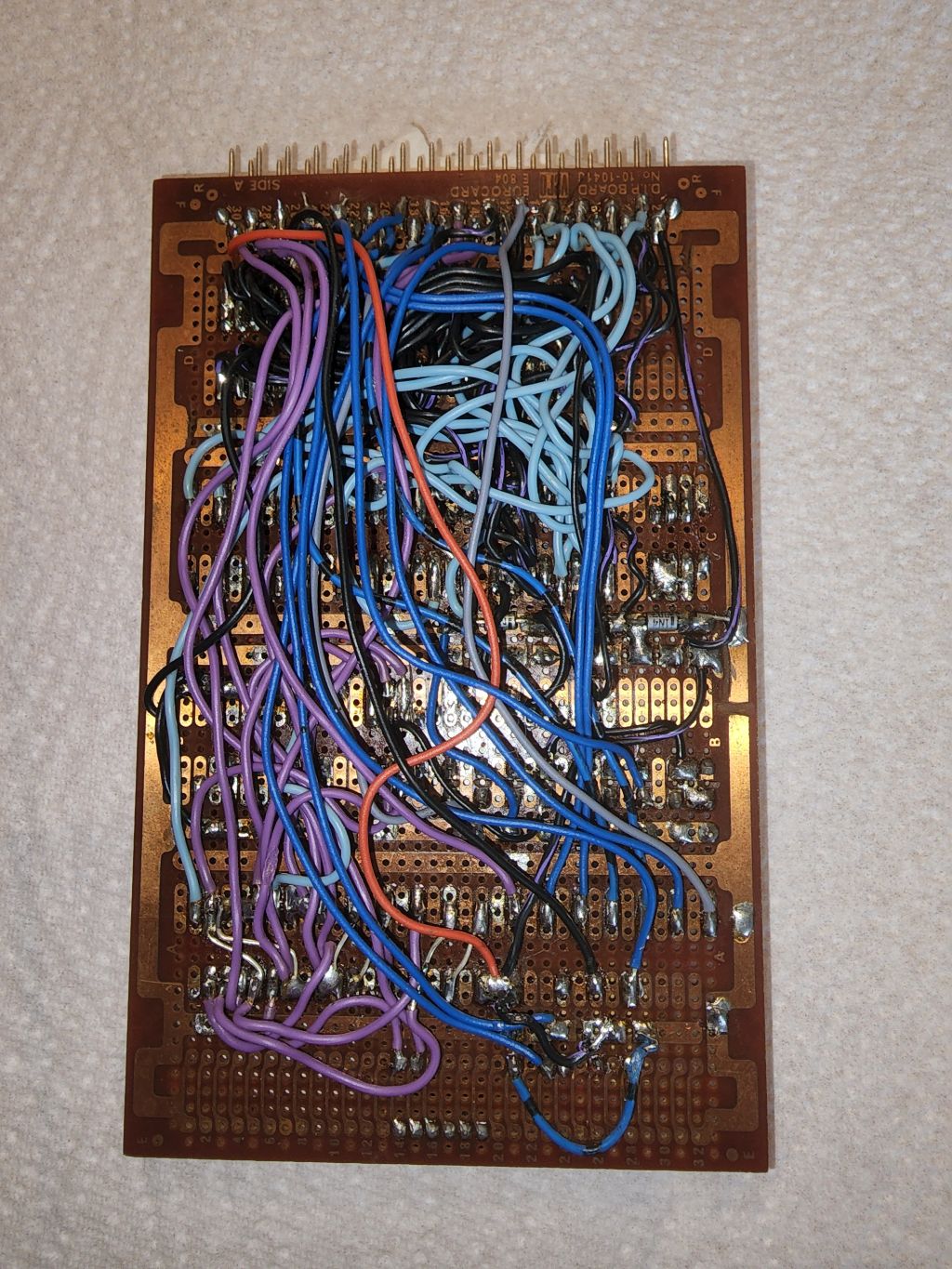
Best regards
Hartwig
Clearly a prototype and it would be extremely difficult to perform a re-engineering and create the circuit diagram.
Best regards
Hartwig
- Korre
- Korre
11 Aug 2025 12:02 - 11 Aug 2025 12:04
best practice Benutzervariablen anzeigen und speichern was created by Korre
best practice Benutzervariablen anzeigen und speichern
Category: Deutsch
Hallo zusammen,
Ich bin neu im Forum und möchte mich bei Allen bedanken die dieses tolle Projekt vorantreiben und verbessern.
Habe LCNC 2.9.4. auf meinem NUC seit einigen Wochen am laufen und schon viel im Forum gelesen.
Nun bin ich aber auf ein Problem gestoßen wozu ich bisher noch nirgends eine Antwort finden konnte.
Ich benutze in meinem Programm einig Anwenderparameter (#31 usw.) welche ich während dem Programmlauf beobachten möchte!.
- In der linuxcnc.var geht es live und zur Laufzeit nicht .
- in der LinuxCNC-Status-Anzeige (linuxcnctop) auch nicht.
- in der HAL Konfiguration unter "watch" ??? --> macht es Sinn, - Alle meine Parameter in der INI unter einer Custom Section anzulegen und so zu beobachten?
--> Wenn ja wie werden die dann persistent gespeichert?
-Hätte diese Vorgehensweise Vorteile, wenn ich später noch eine GladeVCP Oberfläche dafür bauen möchte?
- Ansonsten gibt es noch die Befehle MSG , DEBUG, usw... -> Jedoch habe ich beim CNC-Programm-Ablauf kein Meldungsfenster mehr, - anstelle dem ist ja der NC Code zu sehen und die 1000 aufpoppende Fester rechts unten sind dafür wenig praktikabel.
Nun mein Frage:
Wie kann ich am besten meine Variablen während dem Programmlauf live beobachten?
Viele liebe Grüße
Korre
Ich bin neu im Forum und möchte mich bei Allen bedanken die dieses tolle Projekt vorantreiben und verbessern.
Habe LCNC 2.9.4. auf meinem NUC seit einigen Wochen am laufen und schon viel im Forum gelesen.
Nun bin ich aber auf ein Problem gestoßen wozu ich bisher noch nirgends eine Antwort finden konnte.
Ich benutze in meinem Programm einig Anwenderparameter (#31 usw.) welche ich während dem Programmlauf beobachten möchte!.
- In der linuxcnc.var geht es live und zur Laufzeit nicht .
- in der LinuxCNC-Status-Anzeige (linuxcnctop) auch nicht.
- in der HAL Konfiguration unter "watch" ??? --> macht es Sinn, - Alle meine Parameter in der INI unter einer Custom Section anzulegen und so zu beobachten?
--> Wenn ja wie werden die dann persistent gespeichert?
-Hätte diese Vorgehensweise Vorteile, wenn ich später noch eine GladeVCP Oberfläche dafür bauen möchte?
- Ansonsten gibt es noch die Befehle MSG , DEBUG, usw... -> Jedoch habe ich beim CNC-Programm-Ablauf kein Meldungsfenster mehr, - anstelle dem ist ja der NC Code zu sehen und die 1000 aufpoppende Fester rechts unten sind dafür wenig praktikabel.
Nun mein Frage:
Wie kann ich am besten meine Variablen während dem Programmlauf live beobachten?
Viele liebe Grüße
Korre
- Hartwig
- Hartwig
11 Aug 2025 11:50
Replied by Hartwig on topic New member from Germany - CNC retrofit of a Leinen FM1
New member from Germany - CNC retrofit of a Leinen FM1
Category: General LinuxCNC Questions
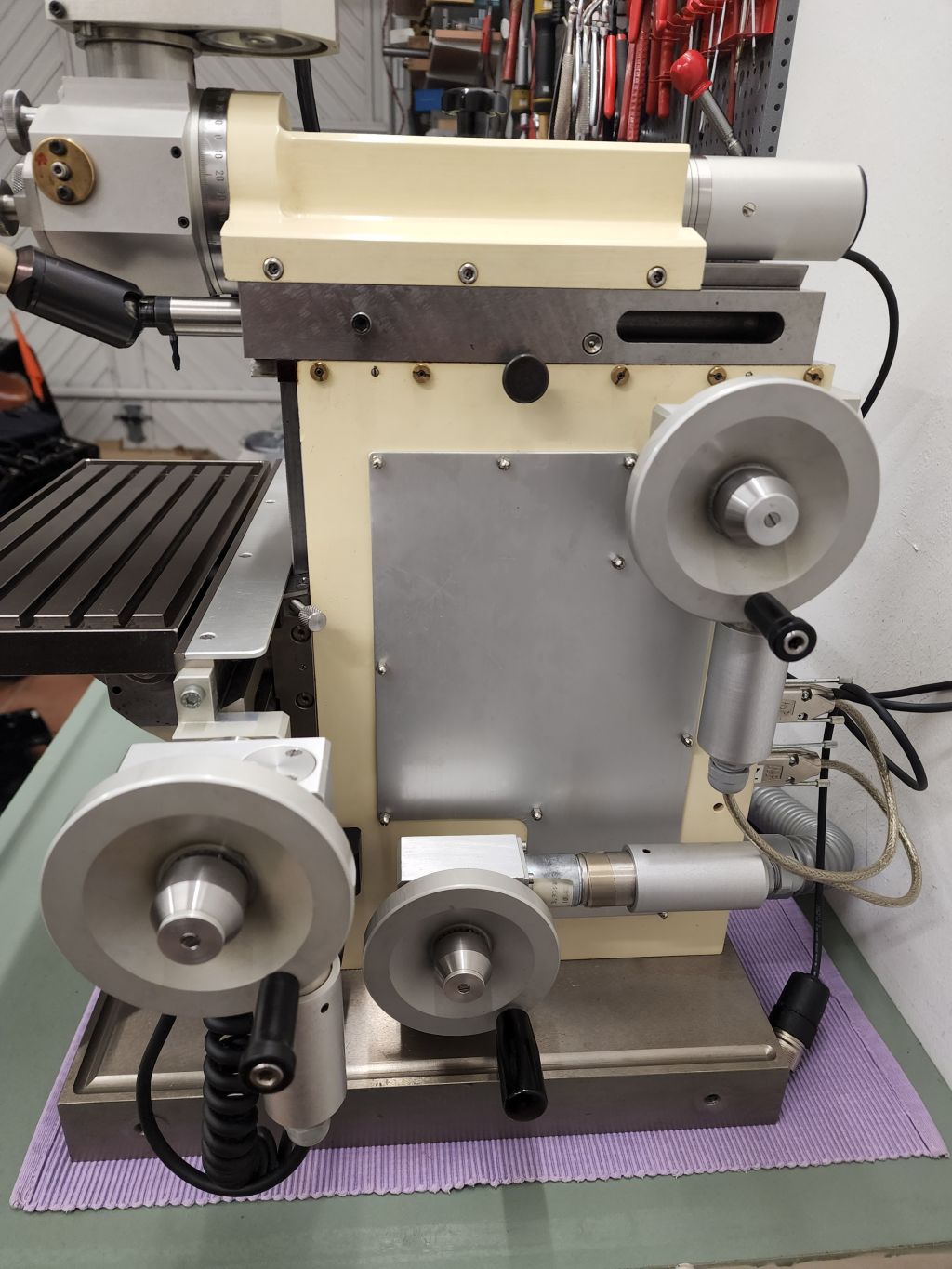
Hi Mark,
here I'm adding some pictures. The spindles accept 8 mm Watchmaker collets from Boley & Leinen and G.Boley, Unfortunately Schaublin B8 does not fit because of the too narrow slot on the shaft of the collets.



Best regards
Hartwig
here I'm adding some pictures. The spindles accept 8 mm Watchmaker collets from Boley & Leinen and G.Boley, Unfortunately Schaublin B8 does not fit because of the too narrow slot on the shaft of the collets.
Best regards
Hartwig
- MaHa
- MaHa
11 Aug 2025 11:37
Replied by MaHa on topic Flex Gui preset buttons
Flex Gui preset buttons
Category: Flex GUI
Still busy to rebuild and test, another problem occured with gcode containing umlauts. My german cam is not configurable to avoid äöü in comments. The UI crashes(in my sim) when loading a file containing umlauts in comments.
- Japoo_Ness
- Japoo_Ness
11 Aug 2025 11:06
Replied by Japoo_Ness on topic Retrofitting a 3-axis VMC with DC servos - guidance needed
Retrofitting a 3-axis VMC with DC servos - guidance needed
Category: Driver Boards
Hi, thanks for sharing your Maho retrofit experience, very interesting project.
my machine uses DC servos with ±10 V analog control.
I’m currently deciding which Mesa hardware to choose, but I’ve noticed that most of the combinations I had in mind are out of stock.
One of my doubts is regarding communication:
Some people suggest parallel-port-based cards for heavy, real-time work.
Others mention Ethernet-based cards might be better for future expansion.
My concern is whether Ethernet introduces more delay or has less data transfer capability for this kind of servo control — or if I’m completely wrong in that assumption.
Could you share your opinion or recommendations on:
Which Mesa cards you would choose for ±10 V DC servos in a retrofit like mine.
Whether you think Ethernet is a good choice for long-term expandability.
Any reliable sources or distributors where I might be able to get the boards (especially in Latin America, but I’m open to others).
Thanks in advance for any insight!
my machine uses DC servos with ±10 V analog control.
I’m currently deciding which Mesa hardware to choose, but I’ve noticed that most of the combinations I had in mind are out of stock.
One of my doubts is regarding communication:
Some people suggest parallel-port-based cards for heavy, real-time work.
Others mention Ethernet-based cards might be better for future expansion.
My concern is whether Ethernet introduces more delay or has less data transfer capability for this kind of servo control — or if I’m completely wrong in that assumption.
Could you share your opinion or recommendations on:
Which Mesa cards you would choose for ±10 V DC servos in a retrofit like mine.
Whether you think Ethernet is a good choice for long-term expandability.
Any reliable sources or distributors where I might be able to get the boards (especially in Latin America, but I’m open to others).
Thanks in advance for any insight!
- RoberCNC
- RoberCNC
11 Aug 2025 10:38
Replied by RoberCNC on topic LiCHUAN A5 AC Servo Fine tunning
LiCHUAN A5 AC Servo Fine tunning
Category: Advanced Configuration
Okay, I understand what you're saying. One option I'd considered is to connect the driver's OnPos signal to an input on the MESA card to cushion these offsets due to speed and acceleration, so the program doesn't continue reading until they're reached. I don't know if that makes sense or if it's just a wishful thinking.
- mBender
- mBender
11 Aug 2025 09:18
Replied by mBender on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
I guess the easiest is find me on Facebook. Mike Bender, I'm in St Lucie County,but can ship everywhere.
- my1987toyota

11 Aug 2025 09:03 - 11 Aug 2025 11:14
Replied by my1987toyota on topic ARE YOU KIDDING ME YOUTUBE !!!
ARE YOU KIDDING ME YOUTUBE !!!
Category: Off Topic and Test Posts
Also looking into TAILS a linux distro. It also uses TOR. I am not surprised about VPN's it seemed
like a convenient way to funnel people into specific systems. Kind of like saving everything into
cloud servers except all in real time.
like a convenient way to funnel people into specific systems. Kind of like saving everything into
cloud servers except all in real time.
- Edi_48
- Edi_48
- Edi_48
- Edi_48
Time to create page: 0.738 seconds