Search Results (Searched for: )
- Daan96
- Daan96
20 Feb 2025 15:39 - 25 Jun 2025 12:53
- Nathan40
- Nathan40
20 Feb 2025 15:31
Probe getting triggered for non probic moves was created by Nathan40
Probe getting triggered for non probic moves
Category: G&M Codes
- Aciera

20 Feb 2025 15:21 - 20 Feb 2025 15:23
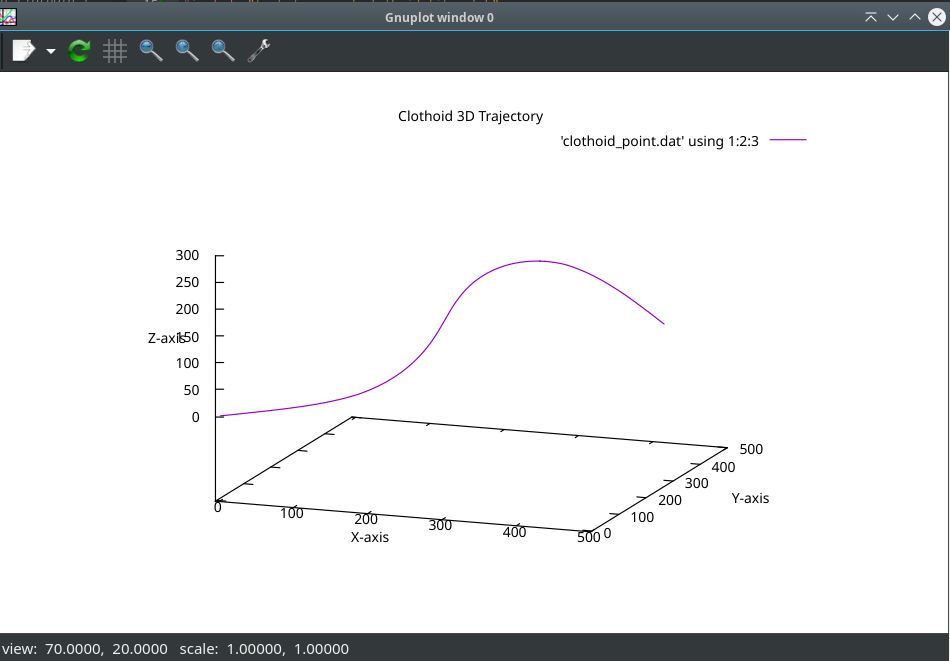
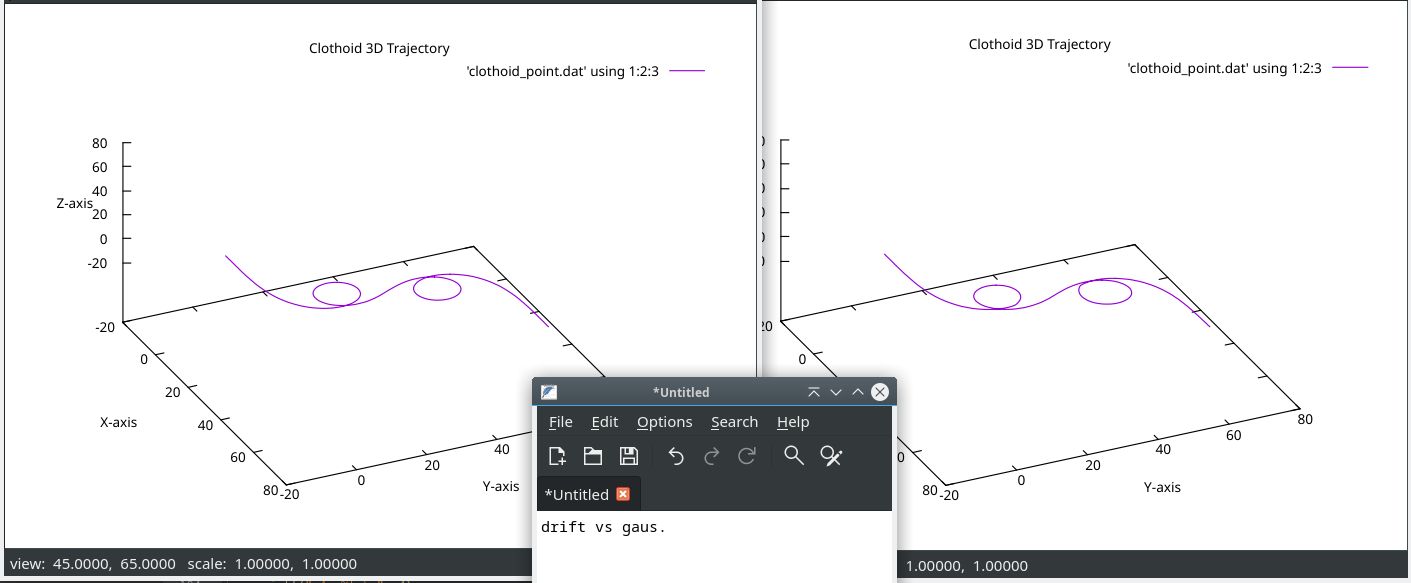
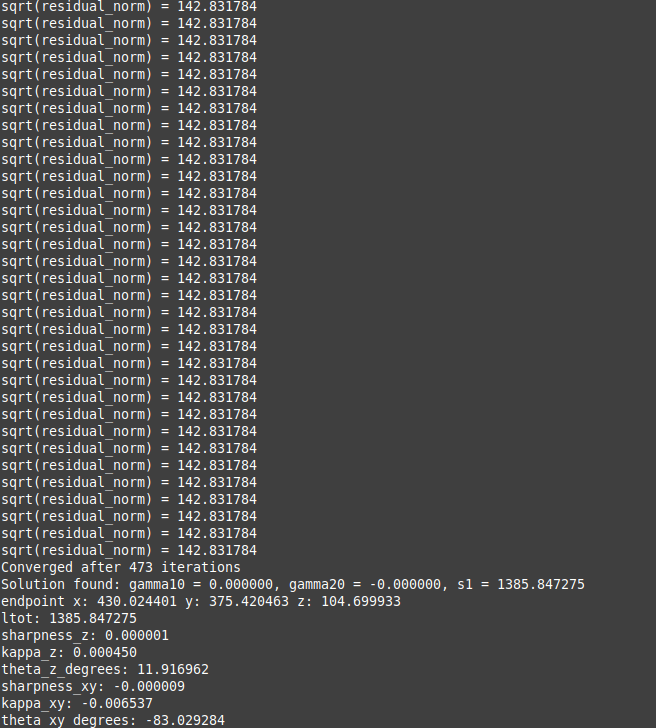
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- Aciera
20 Feb 2025 15:17
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- Grotius

20 Feb 2025 15:02
Replied by Grotius on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- PCW

20 Feb 2025 14:56
Replied by PCW on topic Servo Oscillation Issue at ±6.6V 5i25 + 7i77, Analog Control
Servo Oscillation Issue at ±6.6V 5i25 + 7i77, Analog Control
Category: Basic Configuration
- Aciera
20 Feb 2025 14:33
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- tommylight

20 Feb 2025 14:28
- Aciera
20 Feb 2025 14:25
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- Aciera
20 Feb 2025 14:22
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- denhen89

20 Feb 2025 14:12
- JT

20 Feb 2025 14:08
Replied by JT on topic Mesa Configuration Tool
Mesa Configuration Tool
Category: Configuration Tools
- JT
20 Feb 2025 14:04
- mc_cubus
- mc_cubus
20 Feb 2025 13:50
Replied by mc_cubus on topic Issue with LinuxCNC Pins showing zero
Issue with LinuxCNC Pins showing zero
Category: EtherCAT
- Aciera
20 Feb 2025 13:46 - 20 Feb 2025 14:01
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
Time to create page: 0.765 seconds