Search Results (Searched for: )
- ihavenofish
- ihavenofish
08 Feb 2025 22:30
Replied by ihavenofish on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- rodw

08 Feb 2025 22:25
Replied by rodw on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- beauxnez
- beauxnez
08 Feb 2025 21:49
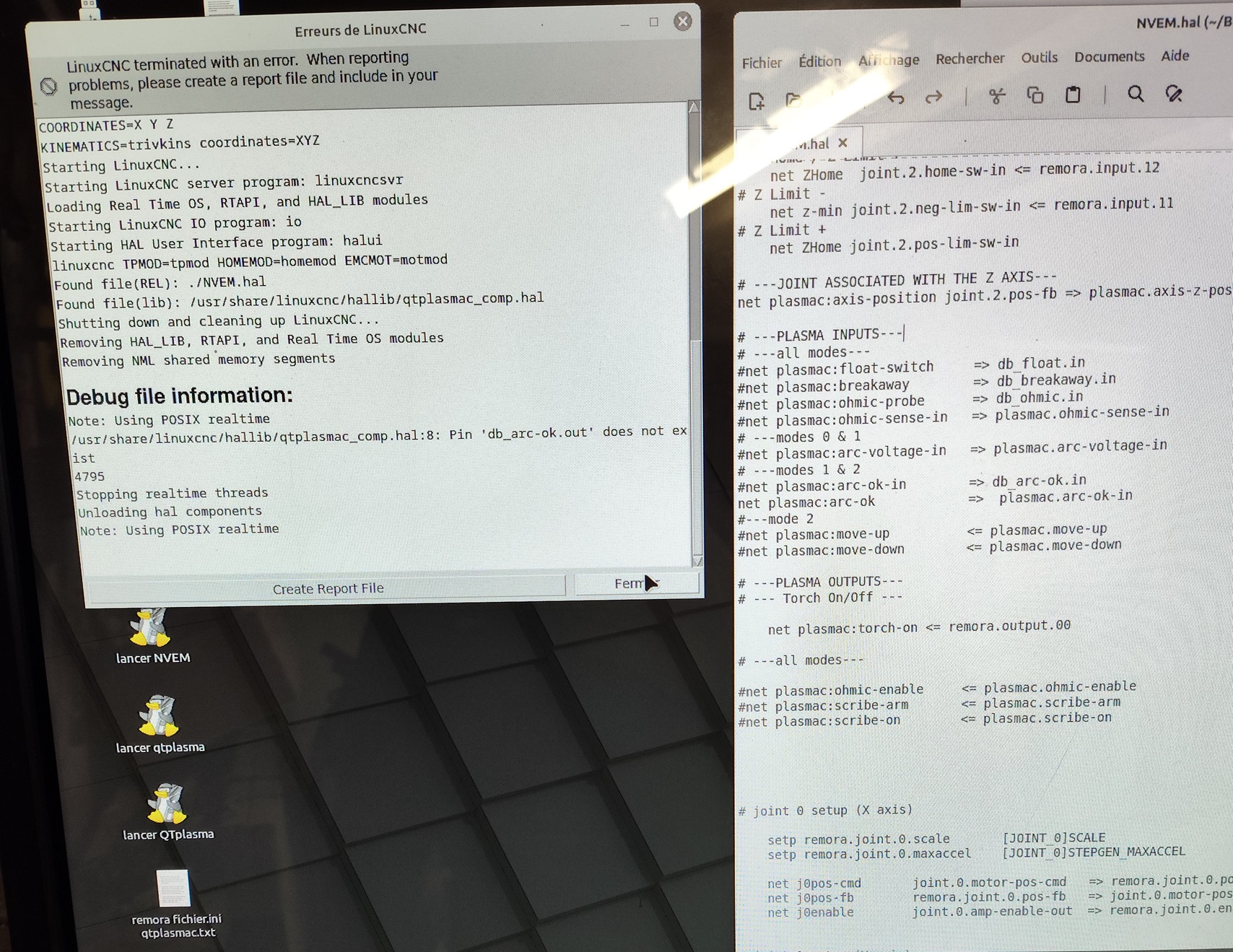
Replied by beauxnez on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- ihavenofish
- ihavenofish
08 Feb 2025 21:32
Replied by ihavenofish on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- rodw
08 Feb 2025 21:28
Replied by rodw on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- yoshimitsuspeed
- yoshimitsuspeed
08 Feb 2025 21:17
- ihavenofish
- ihavenofish
08 Feb 2025 20:58
Replied by ihavenofish on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- rodw
08 Feb 2025 20:33
Replied by rodw on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
- rodw
08 Feb 2025 20:23
Replied by rodw on topic Probe Basic Tool Setter questions
Probe Basic Tool Setter questions
Category: QtPyVCP
- amanker
- amanker
08 Feb 2025 19:36
- Aciera

08 Feb 2025 19:23
Replied by Aciera on topic Error starting gmoccapy with spindle speed display.
Error starting gmoccapy with spindle speed display.
Category: pyVCP
- ihavenofish
- ihavenofish
08 Feb 2025 18:55
Replied by ihavenofish on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- rodw
08 Feb 2025 18:46
Replied by rodw on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- Uthayne
- Uthayne
08 Feb 2025 18:43
Replied by Uthayne on topic Converting a THCAD-300 to a THCAD-10?
Converting a THCAD-300 to a THCAD-10?
Category: Plasma & Laser
- PCW

08 Feb 2025 18:31
Replied by PCW on topic 7i95T + 7i78 spindle configuration
7i95T + 7i78 spindle configuration
Category: Basic Configuration
Time to create page: 1.429 seconds