Hey All,
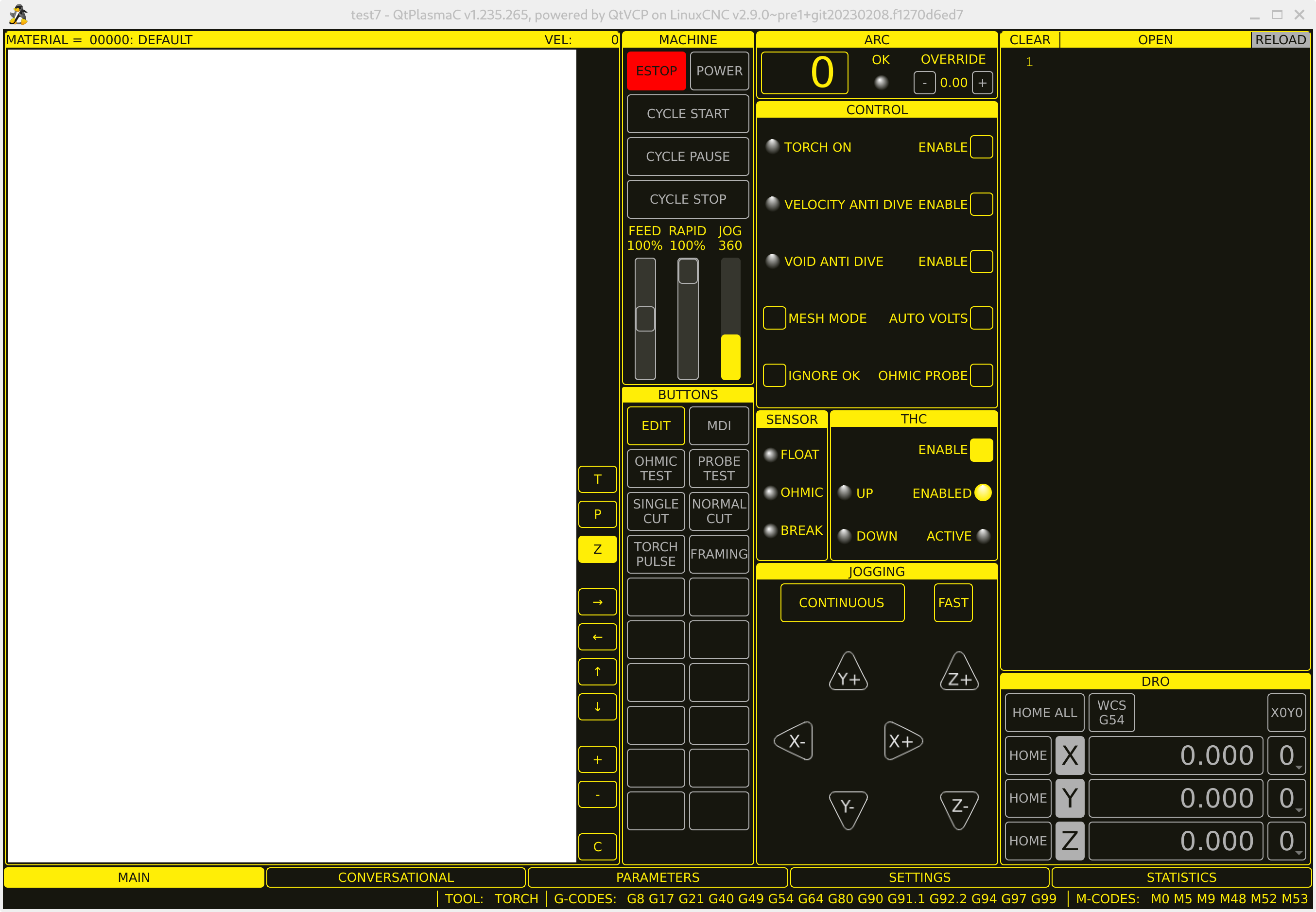
So new CNC built and i'm trying to connect to it. and thats fine, however I cant get linuxcnc to do anything once open, the estop is stuck on.
linuxcnc
LINUXCNC - 2.9.0~pre1+git20230208.f1270d6ed7
Machine configuration directory is '/home/cnc/linuxcnc/configs/test10'
Machine configuration file is 'test10.ini'
Starting LinuxCNC...
linuxcnc TPMOD=tpmod HOMEMOD=homemod EMCMOT=motmod
Note: Using POSIX realtime
Found file(REL): ./test10.hal
identityKinematicsSetup: coordinates:XYYZ
Joint 0 ==> Axis X
Joint 1 ==> Axis Y
Joint 2 ==> Axis Y
Joint 3 ==> Axis Z
identityKinematicsSetup: Recommend: kinstype=both
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 10.10.10.10: INFO: Hardware address (MAC): 00:60:1b:16:03:5b
hm2_eth: discovered 7I96
hm2/hm2_7i96.0: Low Level init 0.15
hm2/hm2_7i96.0: Smart Serial Firmware Version 43
hm2/hm2_7i96.0: 51 I/O Pins used:
hm2/hm2_7i96.0: IO Pin 000 (TB3-01): IOPort
hm2/hm2_7i96.0: IO Pin 001 (TB3-02): IOPort
hm2/hm2_7i96.0: IO Pin 002 (TB3-03): IOPort
hm2/hm2_7i96.0: IO Pin 003 (TB3-04): IOPort
hm2/hm2_7i96.0: IO Pin 004 (TB3-05): IOPort
hm2/hm2_7i96.0: IO Pin 005 (TB3-06): IOPort
hm2/hm2_7i96.0: IO Pin 006 (TB3-07): IOPort
hm2/hm2_7i96.0: IO Pin 007 (TB3-08): IOPort
hm2/hm2_7i96.0: IO Pin 008 (TB3-09): IOPort
hm2/hm2_7i96.0: IO Pin 009 (TB3-10): IOPort
hm2/hm2_7i96.0: IO Pin 010 (TB3-11): IOPort
hm2/hm2_7i96.0: IO Pin 011 (TB3-13/TB3-14): SSR #0, pin Out-00 (Output)
hm2/hm2_7i96.0: IO Pin 012 (TB3-15/TB3-16): SSR #0, pin Out-01 (Output)
hm2/hm2_7i96.0: IO Pin 013 (TB3-17/TB3-18): SSR #0, pin Out-02 (Output)
hm2/hm2_7i96.0: IO Pin 014 (TB3-19/TB3-20): SSR #0, pin Out-03 (Output)
hm2/hm2_7i96.0: IO Pin 015 (TB3-21/TB3-22): SSR #0, pin Out-04 (Output)
hm2/hm2_7i96.0: IO Pin 016 (TB3-23/TB3-24): SSR #0, pin Out-05 (Output)
hm2/hm2_7i96.0: IO Pin 017 (TB1-02/TB1-03): StepGen #0, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 018 (TB1-04/TB1-05): StepGen #0, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 019 (TB1-08/TB1-09): StepGen #1, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 020 (TB1-10/TB1-11): StepGen #1, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 021 (TB1-14/TB1-15): StepGen #2, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 022 (TB1-16/TB1-17): StepGen #2, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 023 (TB1-20/TB1-21): StepGen #3, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 024 (TB1-22-TB1-23): StepGen #3, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 025 (TB2-02/TB2-03): StepGen #4, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 026 (TB2-04/TB2-05): StepGen #4, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 027 (TB2-07/TB2-08): Encoder #0, pin A (Input)
hm2/hm2_7i96.0: IO Pin 028 (TB2-10/TB2-11): Encoder #0, pin B (Input)
hm2/hm2_7i96.0: IO Pin 029 (TB2-13/TB2-14): Encoder #0, pin Index (Input)
hm2/hm2_7i96.0: IO Pin 030 (TB2-16/TB2-17): IOPort
hm2/hm2_7i96.0: IO Pin 031 (TB2-18/TB2-19): IOPort
hm2/hm2_7i96.0: IO Pin 032 (internal): IOPort
hm2/hm2_7i96.0: IO Pin 033 (internal): SSR #0, pin AC Ref (internal) (Output)
hm2/hm2_7i96.0: IO Pin 034 (P1-01/DB25-01): IOPort
hm2/hm2_7i96.0: IO Pin 035 (P1-02/DB25-14): IOPort
hm2/hm2_7i96.0: IO Pin 036 (P1-03/DB25-02): IOPort
hm2/hm2_7i96.0: IO Pin 037 (P1-04/DB25-15): IOPort
hm2/hm2_7i96.0: IO Pin 038 (P1-05/DB25-03): IOPort
hm2/hm2_7i96.0: IO Pin 039 (P1-06/DB25-16): IOPort
hm2/hm2_7i96.0: IO Pin 040 (P1-07/DB25-04): IOPort
hm2/hm2_7i96.0: IO Pin 041 (P1-08/DB25-17): IOPort
hm2/hm2_7i96.0: IO Pin 042 (P1-09/DB25-05): IOPort
hm2/hm2_7i96.0: IO Pin 043 (P1-11/DB25-06): IOPort
hm2/hm2_7i96.0: IO Pin 044 (P1-13/DB25-07): IOPort
hm2/hm2_7i96.0: IO Pin 045 (P1-15/DB25-08): IOPort
hm2/hm2_7i96.0: IO Pin 046 (P1-17/DB25-09): IOPort
hm2/hm2_7i96.0: IO Pin 047 (P1-19/DB25-10): IOPort
hm2/hm2_7i96.0: IO Pin 048 (P1-21/DB25-11): IOPort
hm2/hm2_7i96.0: IO Pin 049 (P1-23/DB25-12): IOPort
hm2/hm2_7i96.0: IO Pin 050 (P1-25/DB25-13): IOPort
hm2/hm2_7i96.0: registered
Found file(lib): /usr/share/linuxcnc/hallib/qtplasmac_comp.hal
Found file(REL): ./custom.hal
QSocketNotifier: Can only be used with threads started with QThread