Search Results (Searched for: )
- Blume
- Blume
13 Dec 2024 17:40
- greg23_78
- greg23_78
13 Dec 2024 17:14
Replied by greg23_78 on topic Solution fo "hm2 error finishing read" with no good PC
Solution fo "hm2 error finishing read" with no good PC
Category: Computers and Hardware
") .
.- StoneB
- StoneB
13 Dec 2024 17:10
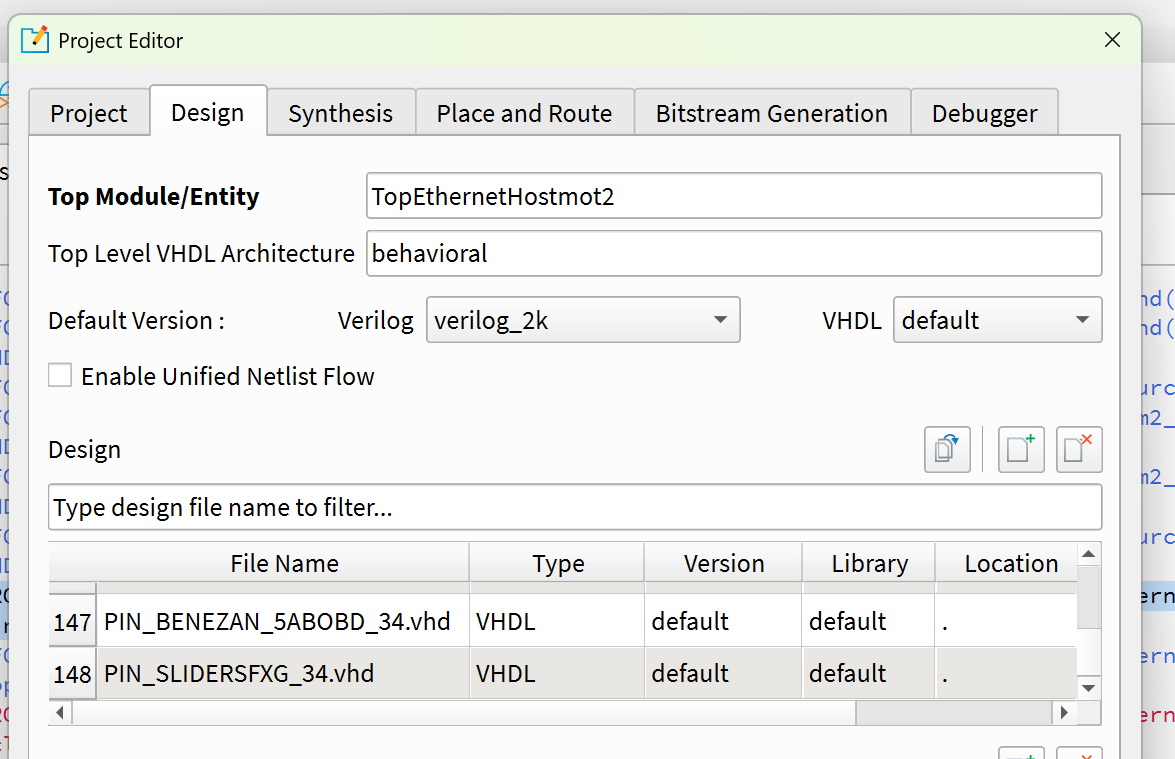
Replied by StoneB on topic Xilinx Setup to edit config for 7i92T
Xilinx Setup to edit config for 7i92T
Category: Driver Boards
- Lcvette

13 Dec 2024 16:56 - 13 Dec 2024 16:57
- tommylight

13 Dec 2024 16:36
Replied by tommylight on topic Servo tuning for an axis that behaves different in one direction versus the othe
Servo tuning for an axis that behaves different in one direction versus the othe
Category: CNC Machines
- Mitch66
- Mitch66
13 Dec 2024 16:35
Replied by Mitch66 on topic Improving Base Thread Jitter
Improving Base Thread Jitter
Category: Installing LinuxCNC
- Sockheaven

13 Dec 2024 16:34
Replied by Sockheaven on topic Ethercat installation from repositories - how to step by step
Ethercat installation from repositories - how to step by step
Category: EtherCAT
- Blume
- Blume
13 Dec 2024 16:28 - 13 Dec 2024 16:35
- tommylight
13 Dec 2024 16:24
Replied by tommylight on topic Solution fo "hm2 error finishing read" with no good PC
Solution fo "hm2 error finishing read" with no good PC
Category: Computers and Hardware
- Lcvette
13 Dec 2024 16:22 - 13 Dec 2024 16:23
- PCW

13 Dec 2024 16:21
Replied by PCW on topic Solution fo "hm2 error finishing read" with no good PC
Solution fo "hm2 error finishing read" with no good PC
Category: Computers and Hardware
- Blume
- Blume
13 Dec 2024 16:14
- greg23_78
- greg23_78
13 Dec 2024 16:08 - 13 Dec 2024 16:10
Replied by greg23_78 on topic Solution fo "hm2 error finishing read" with no good PC
Solution fo "hm2 error finishing read" with no good PC
Category: Computers and Hardware

- kb0thn
- kb0thn
13 Dec 2024 16:04
- PCW
13 Dec 2024 15:43
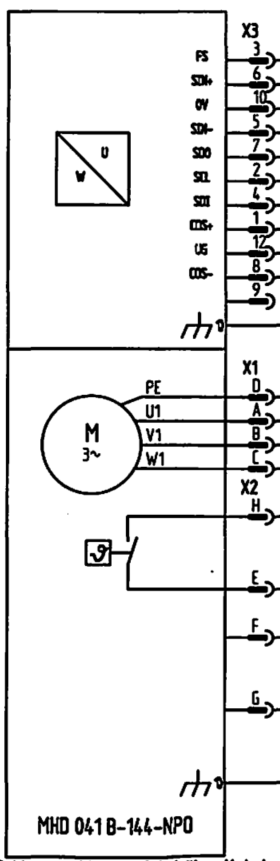
Replied by PCW on topic 7i87 what is the purpose of W1 and W3 ?
7i87 what is the purpose of W1 and W3 ?
Category: Driver Boards
Time to create page: 0.874 seconds