Search Results (Searched for: )
- Lcvette

05 Jun 2024 13:18
- Grotius

05 Jun 2024 13:03
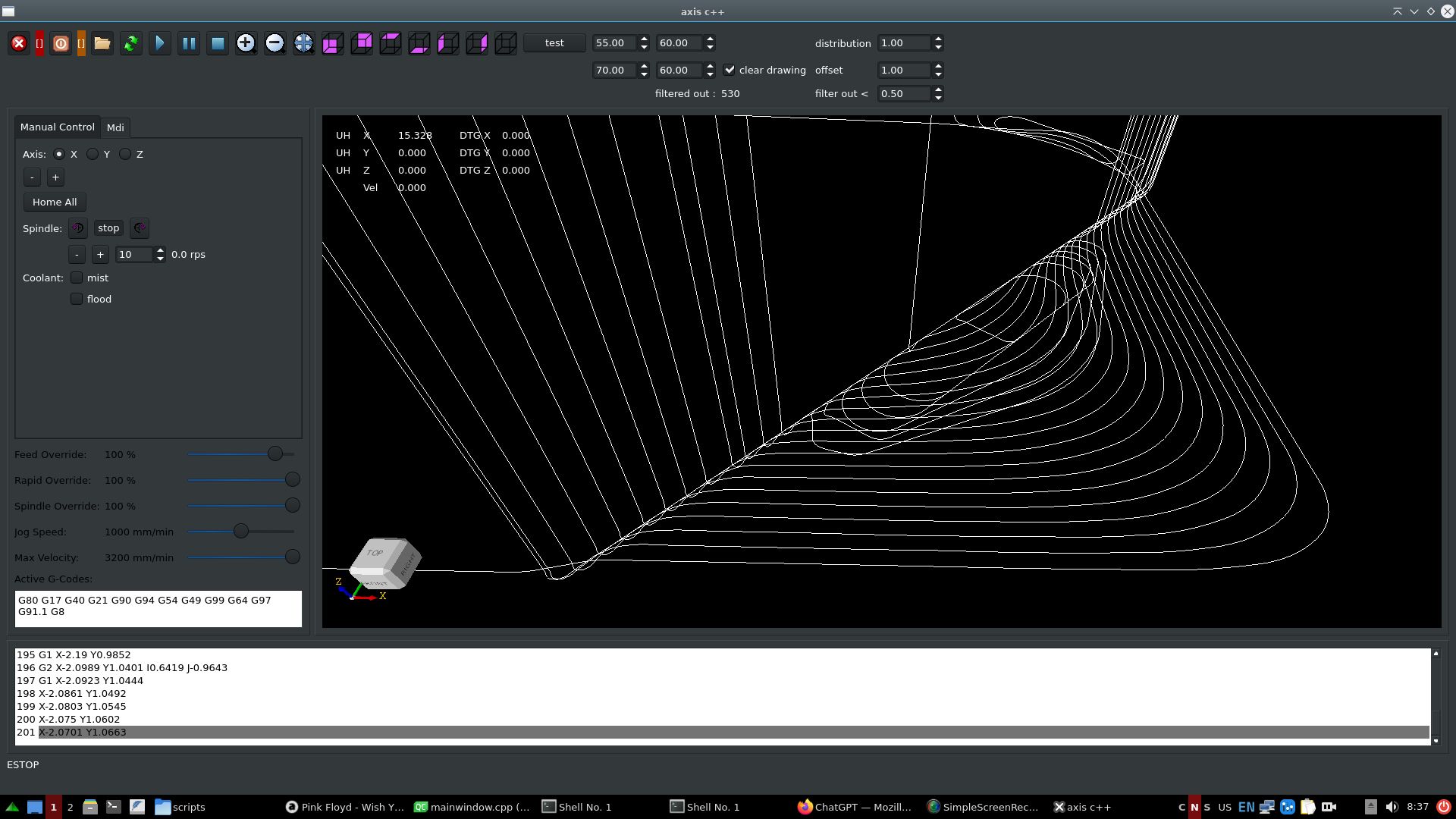
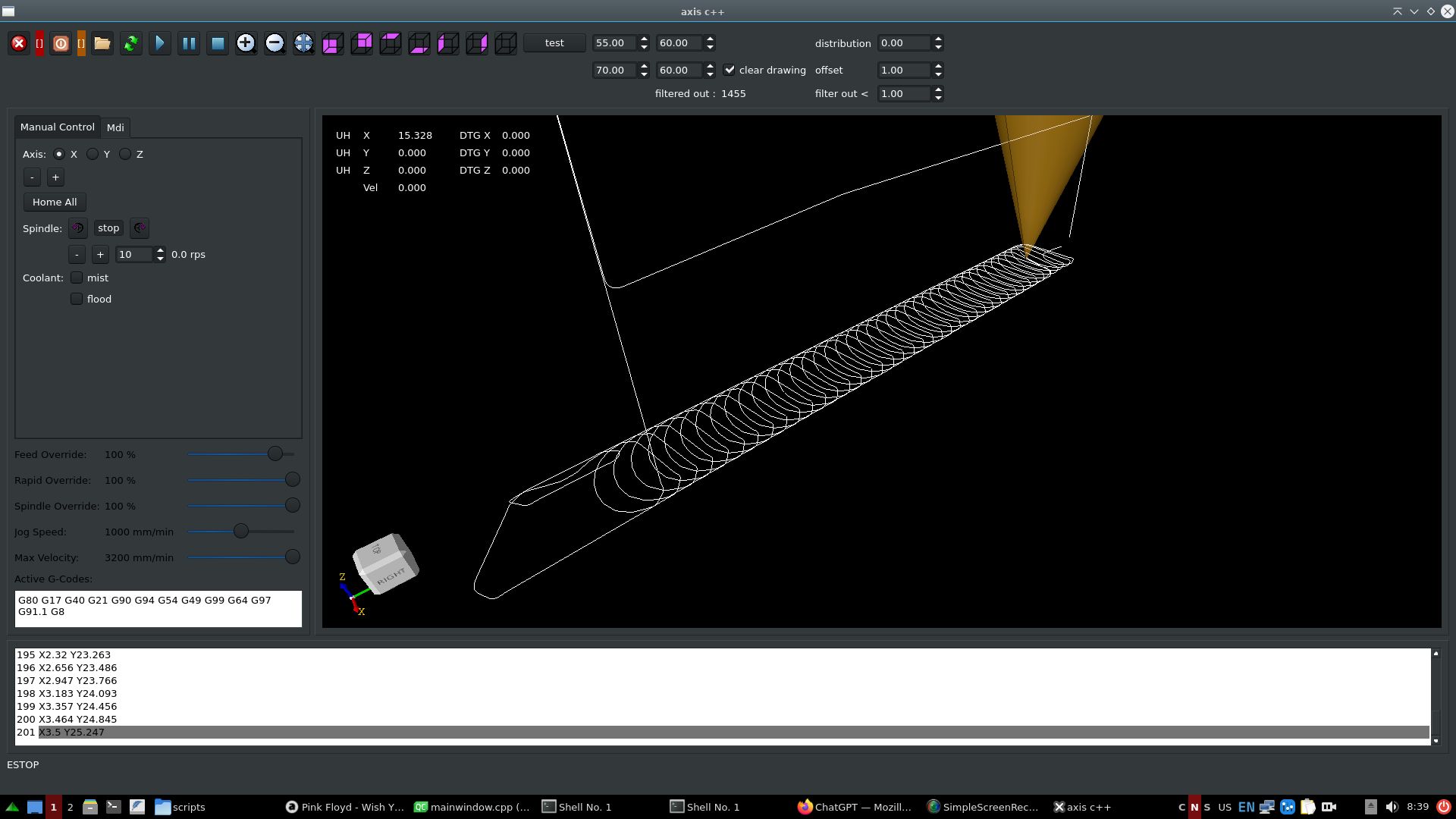
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- Lcvette
05 Jun 2024 12:54
Replied by Lcvette on topic Probe Basic is splitting into Stable and Develop apt branch
Probe Basic is splitting into Stable and Develop apt branch
Category: QtPyVCP
")
- Lcvette
05 Jun 2024 12:46
Replied by Lcvette on topic Probe Basic is splitting into Stable and Develop apt branch
Probe Basic is splitting into Stable and Develop apt branch
Category: QtPyVCP
- Cant do this anymore bye all

05 Jun 2024 12:43
Replied by Cant do this anymore bye all on topic linuxcnc_2.9.1-amd64.hybrid.iso Intallation fail
linuxcnc_2.9.1-amd64.hybrid.iso Intallation fail
Category: Installing LinuxCNC
- PCW

05 Jun 2024 12:42
Replied by PCW on topic Elumatec SBZ 130/01 retrofit
Elumatec SBZ 130/01 retrofit
Category: CNC Machines
- TheRoslyak

05 Jun 2024 12:18
Replied by TheRoslyak on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- Unlogic
- Unlogic
05 Jun 2024 12:15
Replied by Unlogic on topic Probe Basic is splitting into Stable and Develop apt branch
Probe Basic is splitting into Stable and Develop apt branch
Category: QtPyVCP
- JT

05 Jun 2024 11:33
- Cant do this anymore bye all
05 Jun 2024 11:14 - 05 Jun 2024 11:18
Replied by Cant do this anymore bye all on topic linuxcnc_2.9.1-amd64.hybrid.iso Intallation fail
linuxcnc_2.9.1-amd64.hybrid.iso Intallation fail
Category: Installing LinuxCNC
- rodw

05 Jun 2024 10:24
Replied by rodw on topic linuxcnc_2.9.1-amd64.hybrid.iso Intallation fail
linuxcnc_2.9.1-amd64.hybrid.iso Intallation fail
Category: Installing LinuxCNC
- pmchetan
- pmchetan
05 Jun 2024 09:28
Replied by pmchetan on topic Elumatec SBZ 130/01 retrofit
Elumatec SBZ 130/01 retrofit
Category: CNC Machines
- rajsekhar
- rajsekhar
05 Jun 2024 09:26
Replied by rajsekhar on topic 7i92 not pinging
7i92 not pinging
Category: General LinuxCNC Questions
- snowgoer540

05 Jun 2024 07:38 - 05 Jun 2024 16:07
Replied by snowgoer540 on topic Getting super jerky curves
Getting super jerky curves
Category: General LinuxCNC Questions
- snowgoer540
05 Jun 2024 07:37 - 05 Jun 2024 16:07
Replied by snowgoer540 on topic Beginner with LinuxCNC and Roland EGX-300, looking for a few pointers
Beginner with LinuxCNC and Roland EGX-300, looking for a few pointers
Category: General LinuxCNC Questions
Time to create page: 0.590 seconds