Search Results (Searched for: )
- andypugh

22 Jun 2025 18:36
Replied by andypugh on topic Issue with Inverse Kinematics Failing During Homing – 3-Axis Robot with LinuxCNC
Issue with Inverse Kinematics Failing During Homing – 3-Axis Robot with LinuxCNC
Category: HAL
- Aciera

22 Jun 2025 18:34 - 22 Jun 2025 18:38
Replied by Aciera on topic Axis view options are not persistant between sessions. Any thoughts?
Axis view options are not persistant between sessions. Any thoughts?
Category: AXIS
- wm56
- wm56
22 Jun 2025 17:56 - 22 Jun 2025 17:58
Replied by wm56 on topic Probe Basic Not Remembering Current Pocket Number
Probe Basic Not Remembering Current Pocket Number
Category: QtPyVCP
- lex200
- lex200
22 Jun 2025 17:50
- endian

22 Jun 2025 17:48
Replied by endian on topic Problems switching PDO assignments (EP5101-0011)
Problems switching PDO assignments (EP5101-0011)
Category: EtherCAT
- cakeslob
- cakeslob
22 Jun 2025 17:20
Replied by cakeslob on topic Axis view options are not persistant between sessions. Any thoughts?
Axis view options are not persistant between sessions. Any thoughts?
Category: AXIS
- kubes
- kubes
22 Jun 2025 16:32
Replied by kubes on topic Probing alert on missing parameters
Probing alert on missing parameters
Category: QtPyVCP
- Hakan
- Hakan
22 Jun 2025 16:26
Replied by Hakan on topic Problems switching PDO assignments (EP5101-0011)
Problems switching PDO assignments (EP5101-0011)
Category: EtherCAT
- meister
- meister
22 Jun 2025 16:15
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware

")
- workshop54
- workshop54
22 Jun 2025 16:13 - 22 Jun 2025 16:14
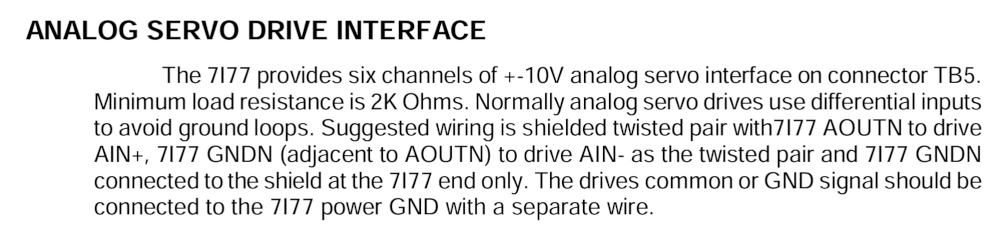
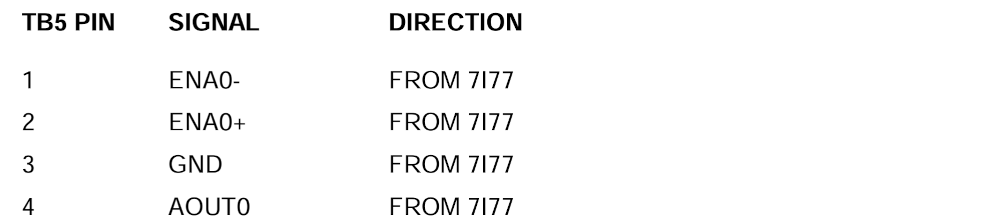
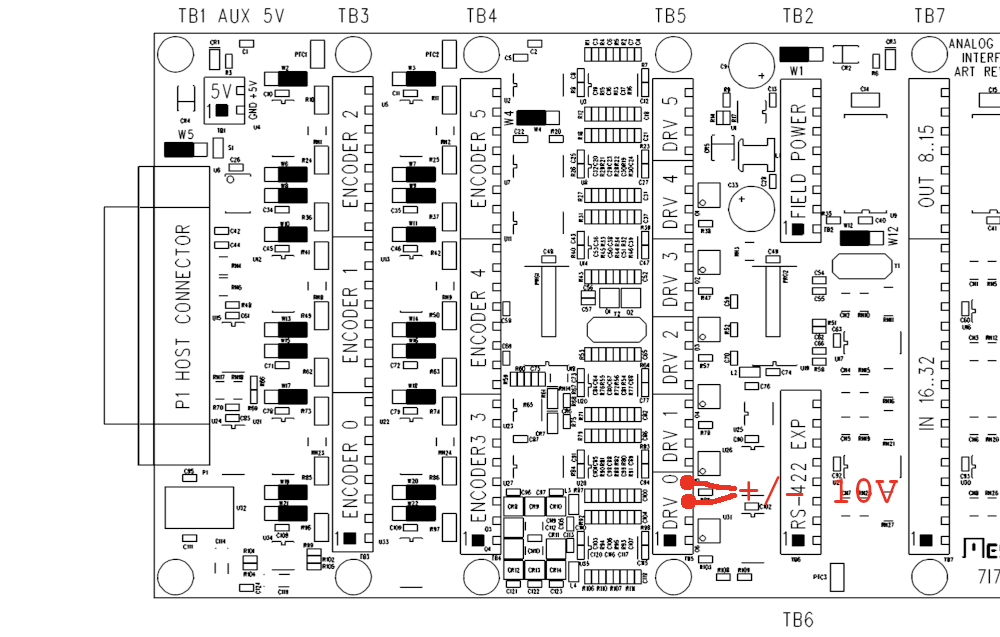
Replied by workshop54 on topic 7i77 +-10V outputs: unexpected voltage with analogena, no output with analogout
7i77 +-10V outputs: unexpected voltage with analogena, no output with analogout
Category: Driver Boards
- PedPEx
- PedPEx
22 Jun 2025 16:09
Problems switching PDO assignments (EP5101-0011) was created by PedPEx
Problems switching PDO assignments (EP5101-0011)
Category: EtherCAT

- Johnnysacalu
- Johnnysacalu
22 Jun 2025 16:01 - 22 Jun 2025 16:41
Replied by Johnnysacalu on topic Como conectar mesa 7i96s
Como conectar mesa 7i96s
Category: Driver Boards
- PedPEx
- PedPEx
22 Jun 2025 15:52
- clayton2ndtry
- clayton2ndtry
22 Jun 2025 15:22
Replied by clayton2ndtry on topic crashing at startup
crashing at startup
Category: General LinuxCNC Questions
- clayton2ndtry
- clayton2ndtry
22 Jun 2025 15:17
Replied by clayton2ndtry on topic crashing at startup
crashing at startup
Category: General LinuxCNC Questions
Time to create page: 0.310 seconds