Search Results (Searched for: )
- BaxEDM

24 Oct 2024 10:23
- MennilTossFlykune
- MennilTossFlykune
24 Oct 2024 10:16 - 24 Oct 2024 10:19
Replied by MennilTossFlykune on topic Gmoccapy - spindle restarts at program stop
Gmoccapy - spindle restarts at program stop
Category: Gmoccapy
- minimal3d
- minimal3d
24 Oct 2024 09:36
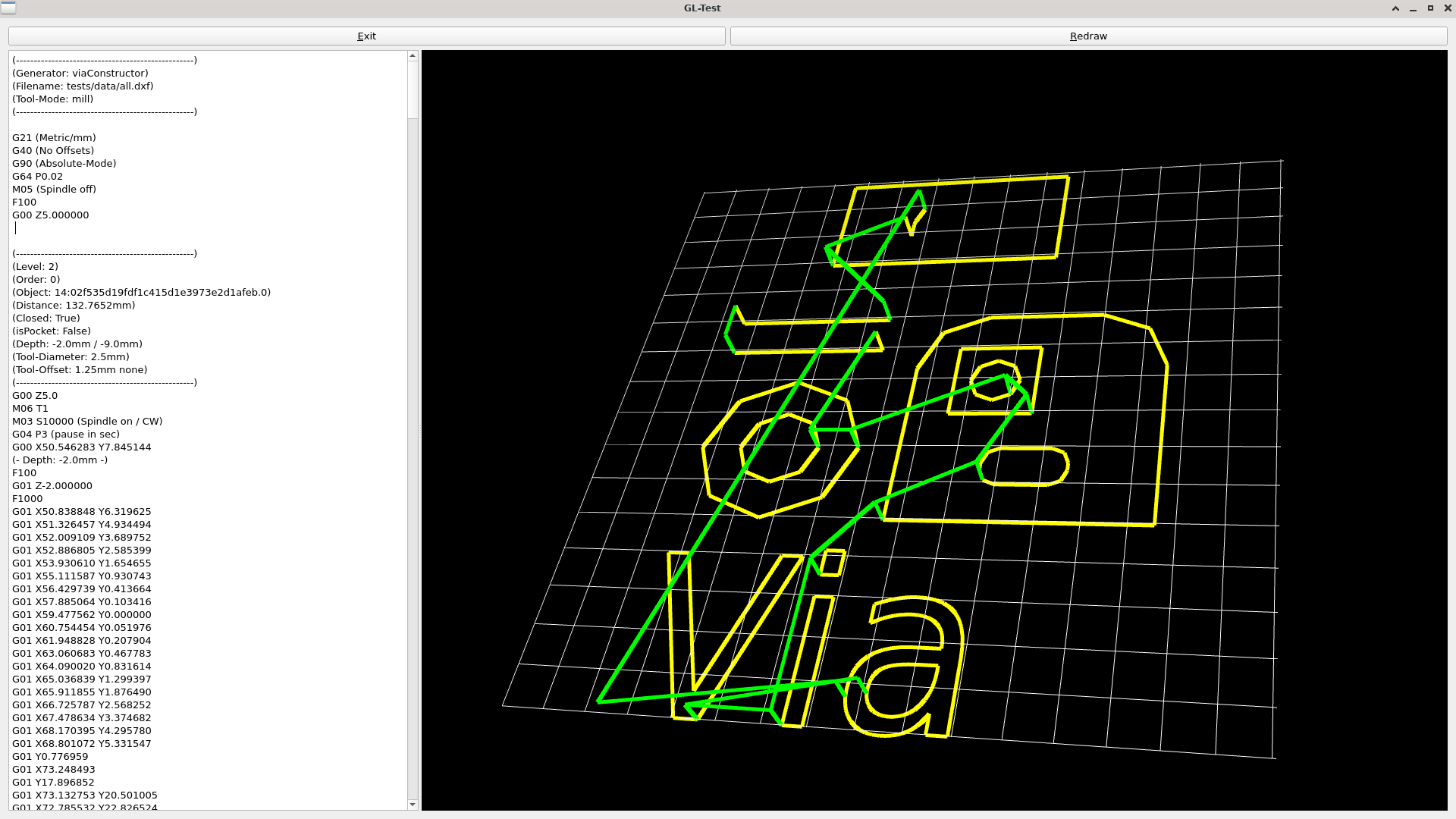
Replied by minimal3d on topic Strange problem with axis GUI
Strange problem with axis GUI
Category: AXIS
")
- meister
- meister
24 Oct 2024 09:35
- btvpimill
- btvpimill
24 Oct 2024 08:47
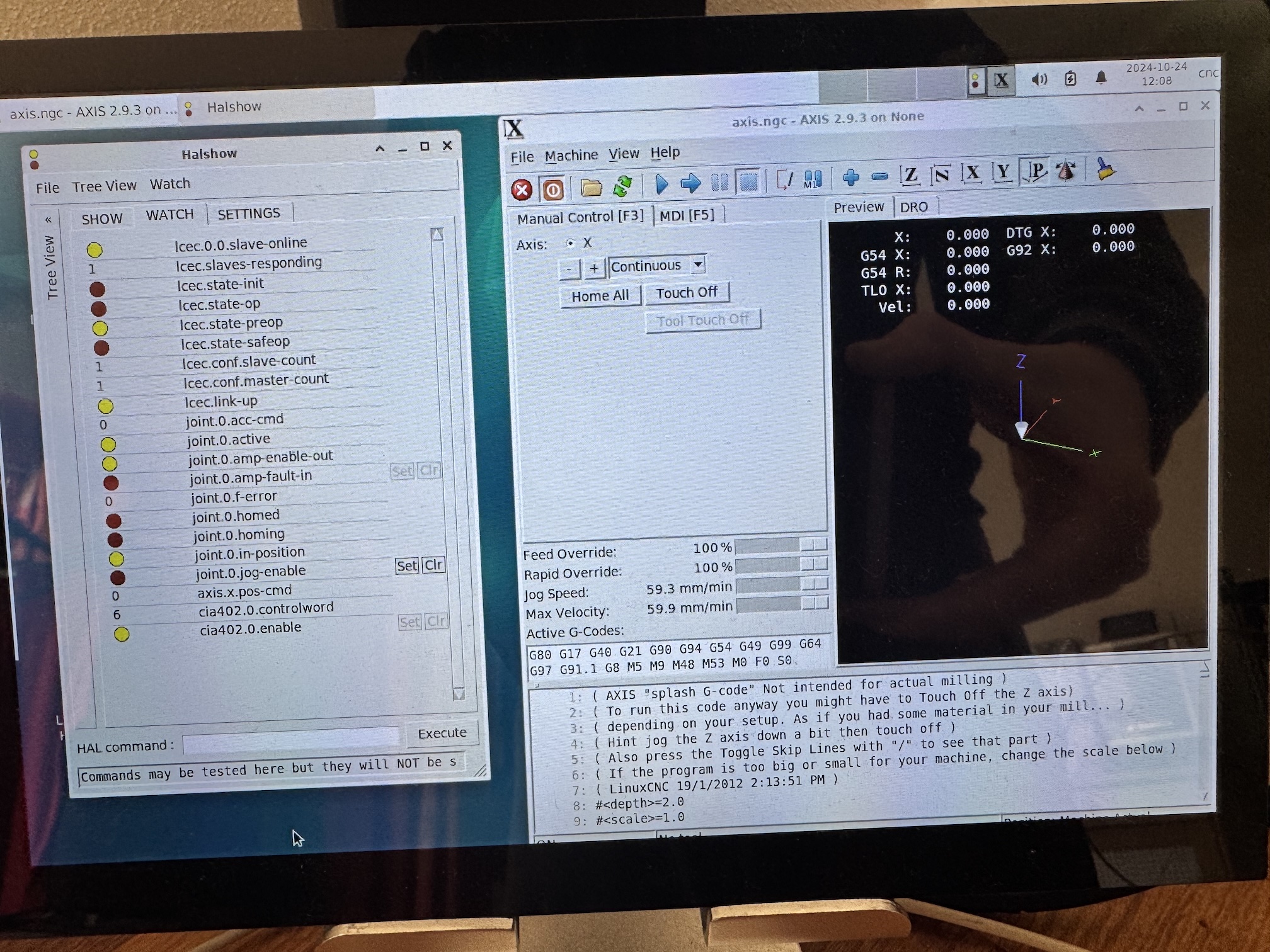
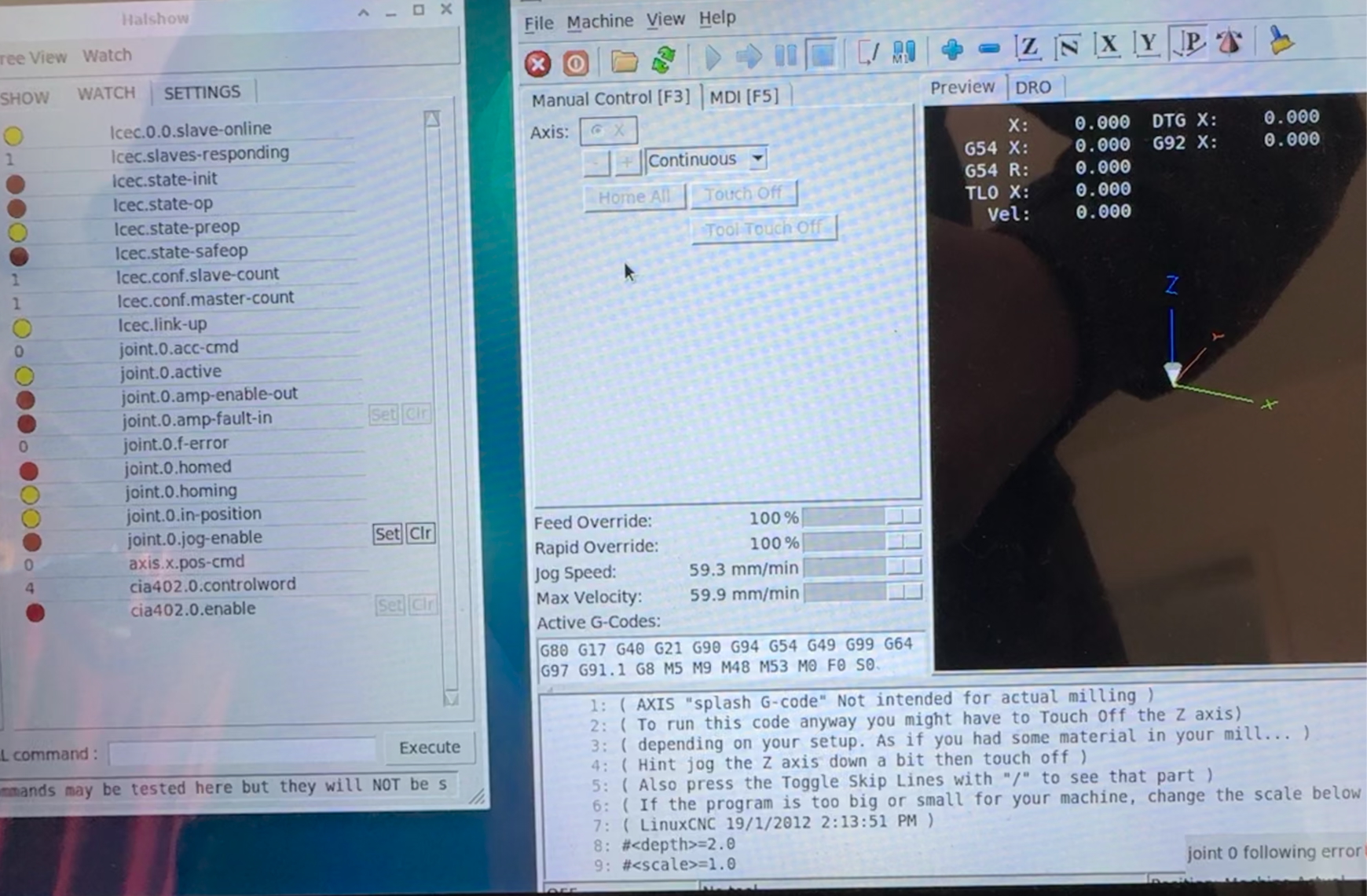
Replied by btvpimill on topic Machine moves when you stop program in the middle
Machine moves when you stop program in the middle
Category: General LinuxCNC Questions
- BaxEDM
24 Oct 2024 08:37 - 24 Oct 2024 08:38
- Jensner
- Jensner
24 Oct 2024 08:18
Replied by Jensner on topic Unexpected realtime delay on task 0 with period 1000000
Unexpected realtime delay on task 0 with period 1000000
Category: QtPyVCP
- meister
- meister
24 Oct 2024 08:09
- meister
- meister
24 Oct 2024 08:05 - 24 Oct 2024 08:06
- yuyu
- yuyu
24 Oct 2024 07:56
- Macwolf
- Macwolf
24 Oct 2024 07:55 - 24 Oct 2024 10:34
Replied by Macwolf on topic Beckhoff components crasht Linuxcnc
Beckhoff components crasht Linuxcnc
Category: EtherCAT
- yuyu
- yuyu
24 Oct 2024 07:55

- bkt

24 Oct 2024 05:34

- Tech3
- Tech3
24 Oct 2024 05:34
Replied by Tech3 on topic Beckhoff components crasht Linuxcnc
Beckhoff components crasht Linuxcnc
Category: EtherCAT
- cmorley
- cmorley
24 Oct 2024 05:27
Replied by cmorley on topic Inconsistent values from Versaprobe
Inconsistent values from Versaprobe
Category: Qtvcp
Time to create page: 0.564 seconds