Search Results (Searched for: )
- HogWild
- HogWild
21 Oct 2024 19:45
- btvpimill
- btvpimill
21 Oct 2024 19:44
Replied by btvpimill on topic Machine moves when you stop program in the middle
Machine moves when you stop program in the middle
Category: General LinuxCNC Questions
- NTULINUX

21 Oct 2024 18:47
Replied by NTULINUX on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
- TheProcessTechnician
- TheProcessTechnician
21 Oct 2024 18:08
Replied by TheProcessTechnician on topic Homing switches dont react, CNC goes on.
Homing switches dont react, CNC goes on.
Category: Basic Configuration
- deltafox24
- deltafox24
21 Oct 2024 17:57 - 21 Oct 2024 18:04
Problem with Huanyang VFD communication via RS485 in LinuxCNC was created by deltafox24
Problem with Huanyang VFD communication via RS485 in LinuxCNC
Category: General LinuxCNC Questions
- kbec
- kbec
21 Oct 2024 17:52
Help with probe/tool setter in qtdragon was created by kbec
Help with probe/tool setter in qtdragon
Category: Other User Interfaces
- martin2day
- martin2day
21 Oct 2024 17:46
")
- gardenweazel

21 Oct 2024 17:19
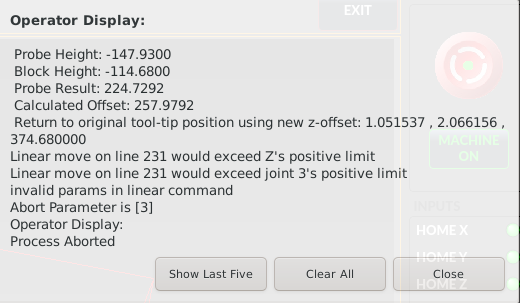
Replied by gardenweazel on topic Inconsistent values from Versaprobe
Inconsistent values from Versaprobe
Category: Qtvcp
- gardenweazel
21 Oct 2024 17:17
Replied by gardenweazel on topic Inconsistent values from Versaprobe
Inconsistent values from Versaprobe
Category: Qtvcp
- Grotius

21 Oct 2024 17:14
Replied by Grotius on topic c++ compiling error
c++ compiling error
Category: Advanced Configuration

- Grotius
21 Oct 2024 16:49
Replied by Grotius on topic linuxcnc trajectory planner
linuxcnc trajectory planner
Category: General LinuxCNC Questions
- PCW

21 Oct 2024 16:47
Replied by PCW on topic 7i95T spindle control via Modbus RS485 and SPINX1A
7i95T spindle control via Modbus RS485 and SPINX1A
Category: Driver Boards
- vmihalca
- vmihalca
21 Oct 2024 16:23
Replied by vmihalca on topic 7i95T spindle control via Modbus RS485 and SPINX1A
7i95T spindle control via Modbus RS485 and SPINX1A
Category: Driver Boards
- Macwolf
- Macwolf
21 Oct 2024 16:15
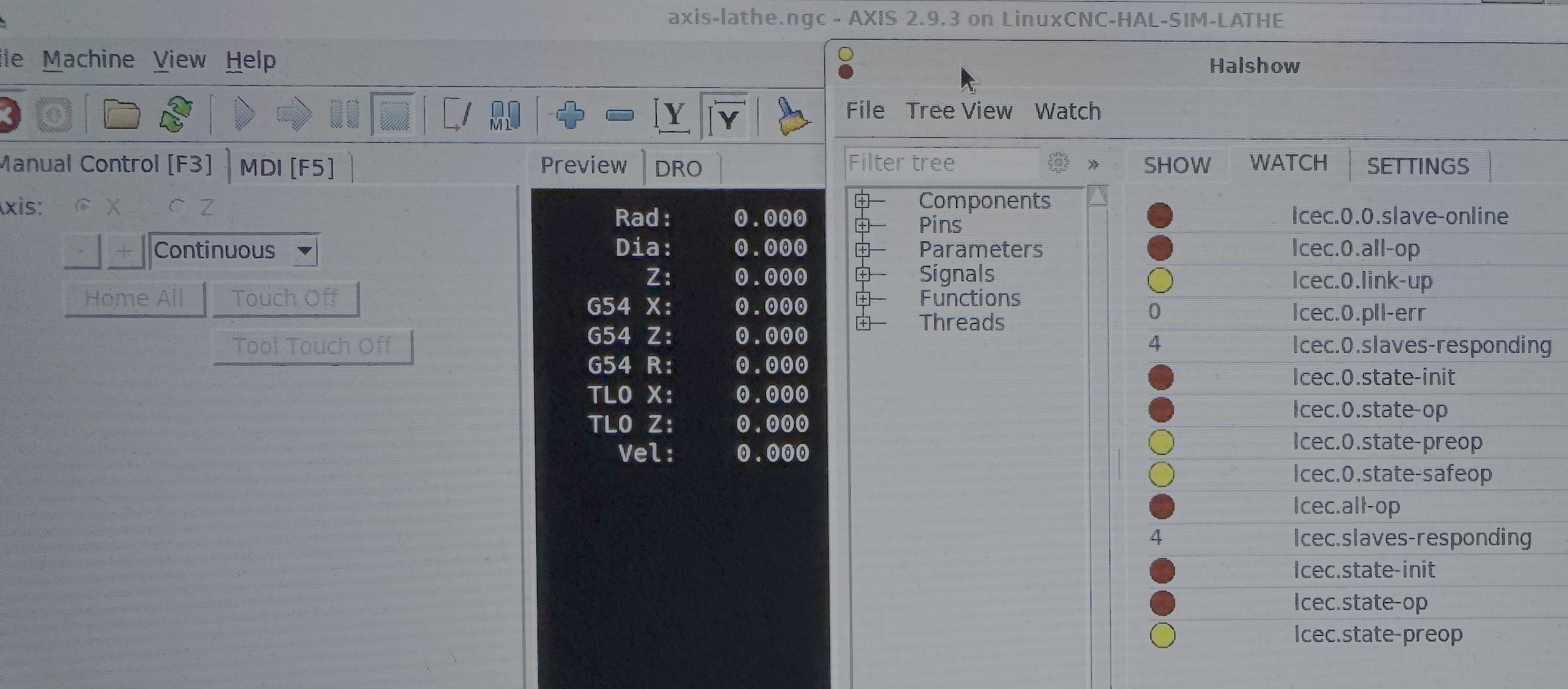
Replied by Macwolf on topic Beckhoff components crasht Linuxcnc
Beckhoff components crasht Linuxcnc
Category: EtherCAT
- Plasmanfm
- Plasmanfm
21 Oct 2024 16:10
Replied by Plasmanfm on topic G-Code Verarbeitung: Kurze Pausen zwischen Bewegungen - Wie beschleunigen?
G-Code Verarbeitung: Kurze Pausen zwischen Bewegungen - Wie beschleunigen?
Category: Deutsch
Time to create page: 0.462 seconds