Search Results (Searched for: )
- beauxnez
- beauxnez
07 Jun 2025 16:39 - 07 Jun 2025 16:44
- TheTinkeringMechanic1
- TheTinkeringMechanic1
07 Jun 2025 16:28 - 07 Jun 2025 19:42
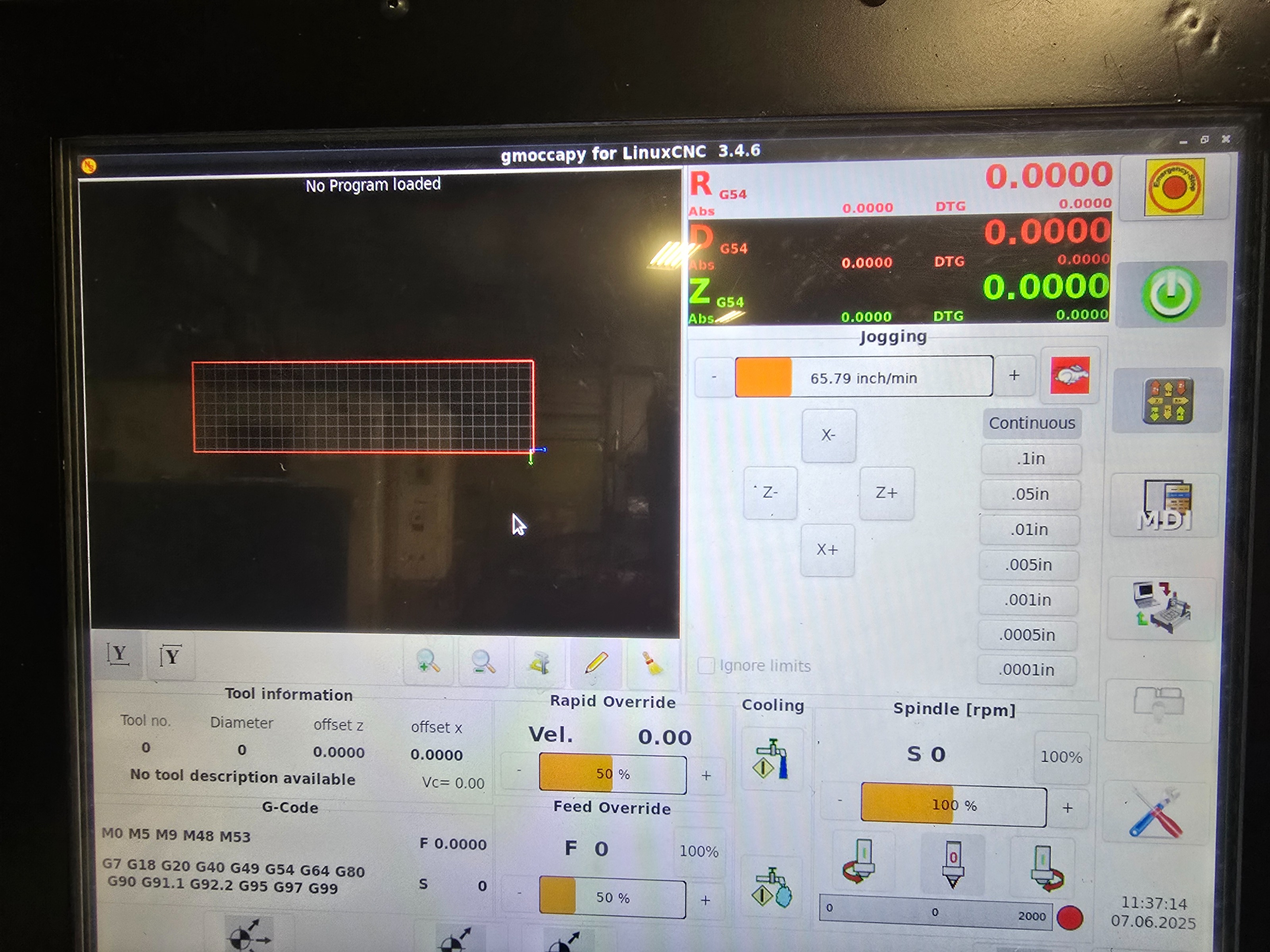
CNC lathe to grinder. was created by TheTinkeringMechanic1
CNC lathe to grinder.
Category: Basic Configuration
- Groovecooper1

07 Jun 2025 15:56
Replied by Groovecooper1 on topic Need help with Linux 2.5 on a CNC lathe
Need help with Linux 2.5 on a CNC lathe
Category: General LinuxCNC Questions
- UweSauter
- UweSauter
07 Jun 2025 15:03 - 07 Jun 2025 15:15
Replied by UweSauter on topic Umbau der Steuerung auf LinuxCNC + EtherCAT
Umbau der Steuerung auf LinuxCNC + EtherCAT
Category: Deutsch
- tommylight

07 Jun 2025 14:07
Replied by tommylight on topic QTPlasmac pierce delay handling
QTPlasmac pierce delay handling
Category: Plasmac
- PCW

07 Jun 2025 13:34
Replied by PCW on topic Wiring up for 7i92T reflash
Wiring up for 7i92T reflash
Category: Driver Boards
- scotth
- scotth
07 Jun 2025 13:16
- kworm
- kworm
07 Jun 2025 13:05
Replied by kworm on topic QTPlasmac pierce delay handling
QTPlasmac pierce delay handling
Category: Plasmac
- scotth
- scotth
07 Jun 2025 12:59
- tommylight
07 Jun 2025 12:25
Replied by tommylight on topic Position: relative expected
Position: relative expected
Category: General LinuxCNC Questions
") Got used to it though.
Got used to it though.- JT

07 Jun 2025 12:00
Replied by JT on topic 7i97t will ping, not recognized by mesaflash
7i97t will ping, not recognized by mesaflash
Category: Driver Boards
- juliankoenig87
- juliankoenig87
07 Jun 2025 11:28 - 07 Jun 2025 11:29
Replied by juliankoenig87 on topic Umbau der Steuerung auf LinuxCNC + EtherCAT
Umbau der Steuerung auf LinuxCNC + EtherCAT
Category: Deutsch
- MaHa
- MaHa
07 Jun 2025 10:53
Replied by MaHa on topic Position: relative expected
Position: relative expected
Category: General LinuxCNC Questions
- jhandel
- jhandel
07 Jun 2025 10:49
Replied by jhandel on topic IO Questions around mixing IO between Ethercat and Pi 5?
IO Questions around mixing IO between Ethercat and Pi 5?
Category: EtherCAT
- WKS-3D

07 Jun 2025 09:40
Replied by WKS-3D on topic Umbau der Steuerung auf LinuxCNC + EtherCAT
Umbau der Steuerung auf LinuxCNC + EtherCAT
Category: Deutsch
Time to create page: 0.447 seconds