Search Results (Searched for: )
- dave.franchino@gmail.com
- dave.franchino@gmail.com
29 Sep 2024 12:58
Replied by dave.franchino@gmail.com on topic Struggling with custom kinematics...
Struggling with custom kinematics...
Category: Advanced Configuration
- Sandro
- Sandro
29 Sep 2024 12:44 - 29 Sep 2024 12:45
Replied by Sandro on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT
- Walkahz
- Walkahz
29 Sep 2024 12:21
Replied by Walkahz on topic Deckel FP4 ATC Retrofit
Deckel FP4 ATC Retrofit
Category: Milling Machines
- Walkahz
- Walkahz
29 Sep 2024 12:10
Linking multiple signals/pins together was created by Walkahz
Linking multiple signals/pins together
Category: ClassicLadder
- Aciera

29 Sep 2024 11:48
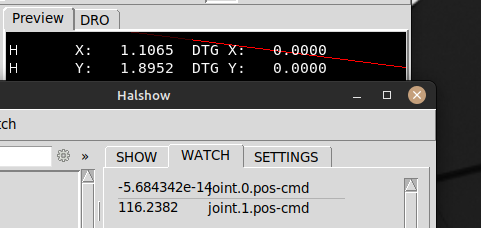
Replied by Aciera on topic Struggling with custom kinematics...
Struggling with custom kinematics...
Category: Advanced Configuration
- Aciera
29 Sep 2024 11:10 - 29 Sep 2024 11:59
- gambaf
- gambaf
29 Sep 2024 10:10
- Giovanni
- Giovanni
29 Sep 2024 09:34
Replied by Giovanni on topic NativeCam on LinuxCNC 2.9.3
NativeCam on LinuxCNC 2.9.3
Category: NativeCAM
- andreabonuc
- andreabonuc
29 Sep 2024 06:21
Replied by andreabonuc on topic Constant loss of position
Constant loss of position
Category: General LinuxCNC Questions

- rebelx
- rebelx
29 Sep 2024 05:19 - 29 Sep 2024 06:54
") I updated the text. Thank you for correcting me!
I updated the text. Thank you for correcting me!- pippin88
- pippin88
29 Sep 2024 05:05
- dave.franchino@gmail.com
- dave.franchino@gmail.com
29 Sep 2024 03:48
Replied by dave.franchino@gmail.com on topic Struggling with custom kinematics...
Struggling with custom kinematics...
Category: Advanced Configuration
- spumco
- spumco
29 Sep 2024 01:28
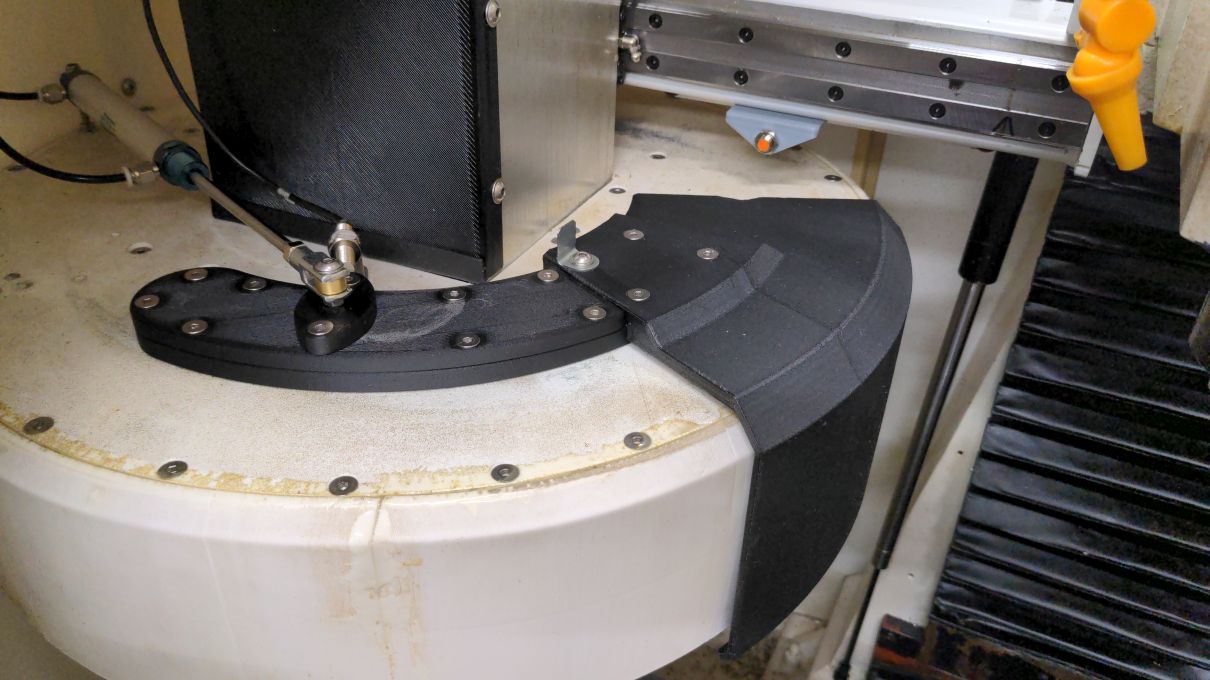
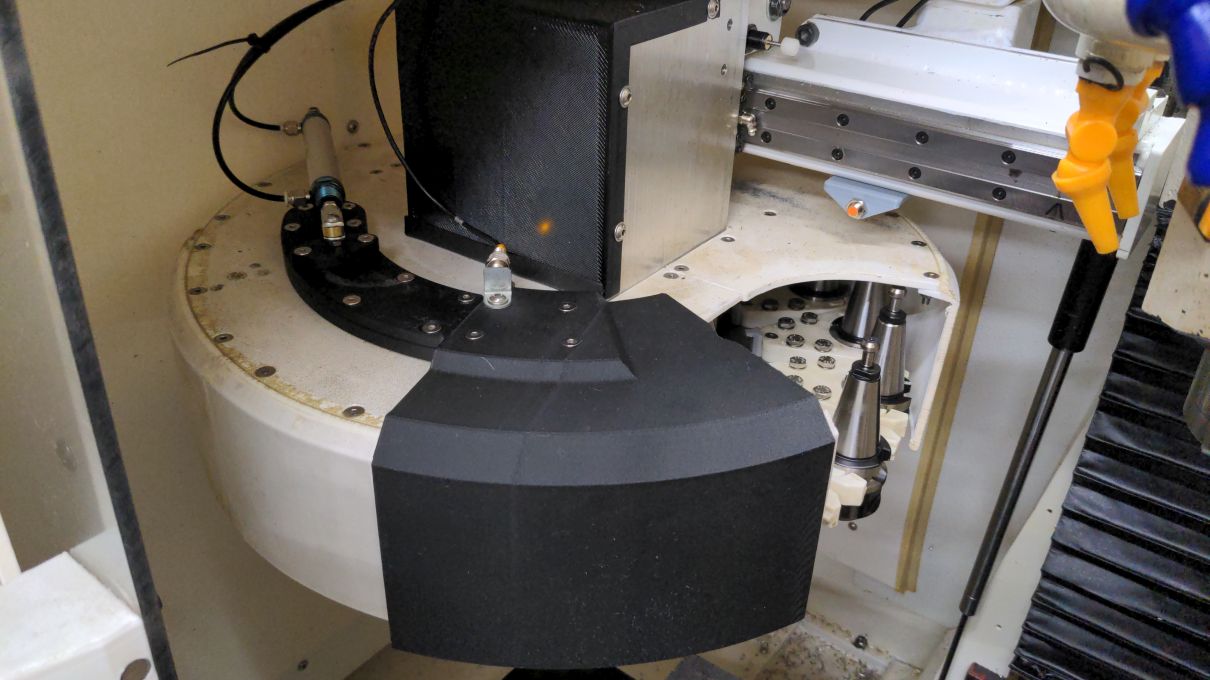
Replied by spumco on topic 3D printed stuff, showcase it here
3D printed stuff, showcase it here
Category: Additive Manufacturing
- slowpoke
- slowpoke
28 Sep 2024 23:28
Replied by slowpoke on topic Re-Home axis after joint has already been homed
Re-Home axis after joint has already been homed
Category: HAL

- PCW

28 Sep 2024 22:44
Replied by PCW on topic Constant loss of position
Constant loss of position
Category: General LinuxCNC Questions
Time to create page: 0.876 seconds