Search Results (Searched for: )
- PCW

20 Aug 2024 15:33
- greg23_78
- greg23_78
20 Aug 2024 15:27 - 20 Aug 2024 15:28

- slowpoke
- slowpoke
20 Aug 2024 15:18
- PCW
20 Aug 2024 15:18
Replied by PCW on topic Converting a 7i76e config to 7c81/7i76 pair
Converting a 7i76e config to 7c81/7i76 pair
Category: General LinuxCNC Questions
- spumco
- spumco
20 Aug 2024 15:14
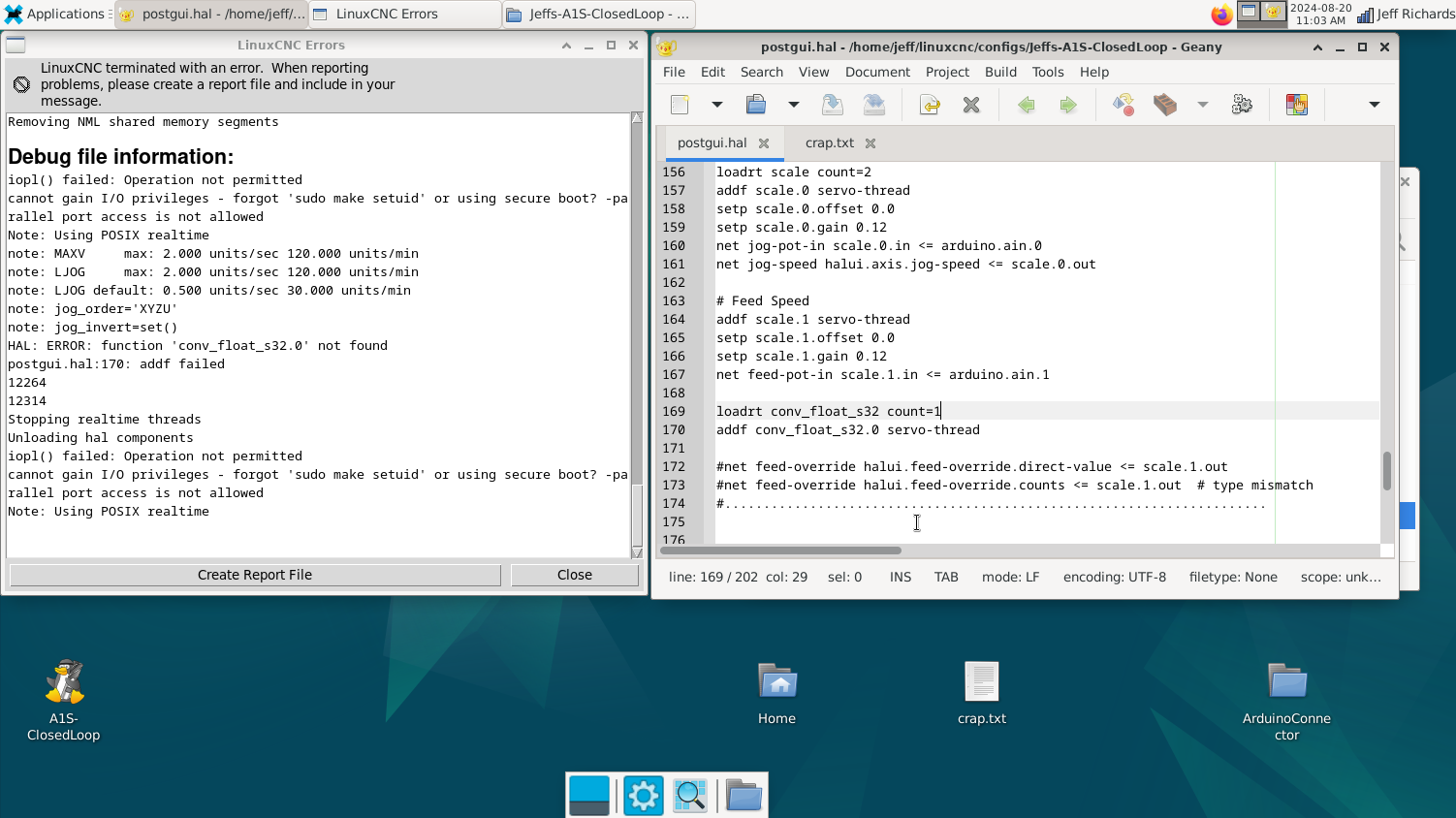
Replied by spumco on topic Dynamic jog speed from HAL, Possible?
Dynamic jog speed from HAL, Possible?
Category: HAL
- schuetzbuilds
- schuetzbuilds
20 Aug 2024 14:32
Retrofitting a MAHO MH600T was created by schuetzbuilds
Retrofitting a MAHO MH600T
Category: Milling Machines




- acondit
- acondit
20 Aug 2024 14:03
Replied by acondit on topic Converting a 7i76e config to 7c81/7i76 pair
Converting a 7i76e config to 7c81/7i76 pair
Category: General LinuxCNC Questions
- Aciera

20 Aug 2024 13:09 - 20 Aug 2024 13:22
Replied by Aciera on topic Dynamic jog speed from HAL, Possible?
Dynamic jog speed from HAL, Possible?
Category: HAL
- tommylight

20 Aug 2024 12:54
Replied by tommylight on topic Computer crashes after "Loading initial ramdisk"
Computer crashes after "Loading initial ramdisk"
Category: Installing LinuxCNC
- my1987toyota

20 Aug 2024 12:49 - 20 Aug 2024 13:01
Replied by my1987toyota on topic Video about shielding cnc machine wiring
Video about shielding cnc machine wiring
Category: Computers and Hardware
- kiwiscanfly

20 Aug 2024 12:16
Replied by kiwiscanfly on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT
- jtupulis
- jtupulis
20 Aug 2024 11:26
Replied by jtupulis on topic [Solved] Trying to install RTAI, got errors
[Solved] Trying to install RTAI, got errors
Category: Installing LinuxCNC
")
- DiegoVV
- DiegoVV
20 Aug 2024 10:42
Replied by DiegoVV on topic Computer crashes after "Loading initial ramdisk"
Computer crashes after "Loading initial ramdisk"
Category: Installing LinuxCNC
- rodw

20 Aug 2024 09:57
Replied by rodw on topic Сreating a component
Сreating a component
Category: General LinuxCNC Questions
- slowpoke
- slowpoke
20 Aug 2024 09:33 - 20 Aug 2024 09:37
Dynamic jog speed from HAL, Possible? was created by slowpoke
Dynamic jog speed from HAL, Possible?
Category: HAL
Time to create page: 0.479 seconds