Search Results (Searched for: )
- meister
- meister
31 May 2025 13:27
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- amir73
- amir73
31 May 2025 13:24 - 31 May 2025 13:29
- SebastianM
- SebastianM
31 May 2025 13:18
Using the preinstalled vnc server was created by SebastianM
Using the preinstalled vnc server
Category: Installing LinuxCNC
")
- wusel0464
- wusel0464
31 May 2025 13:04 - 31 May 2025 13:07
Reading variable from ini no longer works? was created by wusel0464
Reading variable from ini no longer works?
Category: Qtvcp
- epineh
- epineh
31 May 2025 13:01
Replied by epineh on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- juliankoenig87
- juliankoenig87
31 May 2025 13:01
Replied by juliankoenig87 on topic Setting pin value based on other pins
Setting pin value based on other pins
Category: HAL
- atrex77

31 May 2025 11:52 - 31 May 2025 12:00
Replied by atrex77 on topic W5100S-EVB-PICO stepgenerator and encoder driver
W5100S-EVB-PICO stepgenerator and encoder driver
Category: Driver Boards
- meister
- meister
31 May 2025 10:44
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- ruediger123
- ruediger123
31 May 2025 10:23 - 02 Jun 2025 06:37
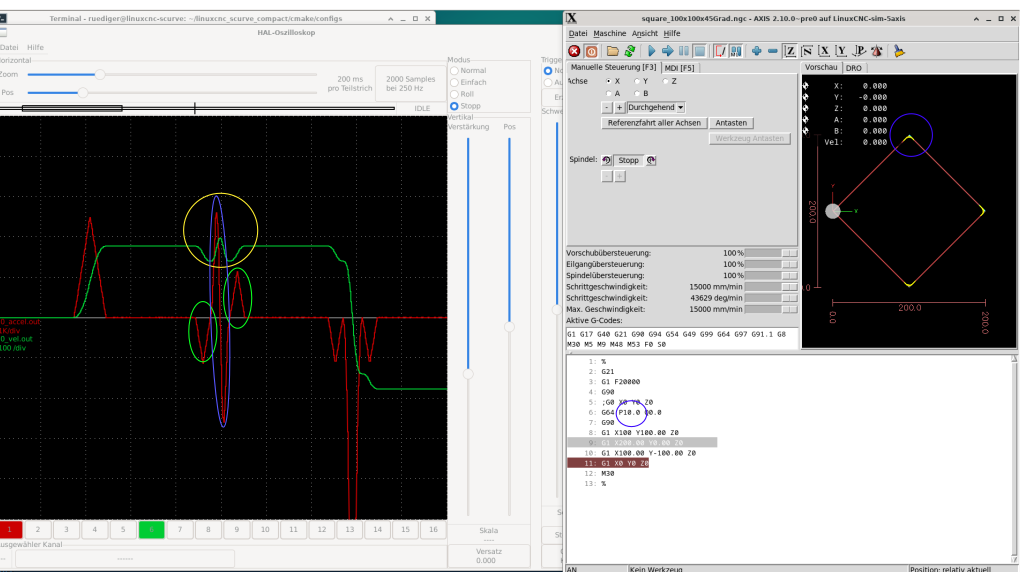
Replied by ruediger123 on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- endian

31 May 2025 09:43
Replied by endian on topic Modbus via Ethercat (Beckhoff)
Modbus via Ethercat (Beckhoff)
Category: EtherCAT
- rodw

31 May 2025 09:29
Replied by rodw on topic Mesa 7i95t connection to Thermal Dynamics 60i
Mesa 7i95t connection to Thermal Dynamics 60i
Category: Plasma & Laser
- rodw
31 May 2025 09:26
- rodw
31 May 2025 09:21
Replied by rodw on topic Setting pin value based on other pins
Setting pin value based on other pins
Category: HAL
- rodw
31 May 2025 09:16
Replied by rodw on topic home build cnc cutting fabric machine
home build cnc cutting fabric machine
Category: Plasma & Laser
- rodw
31 May 2025 09:15
Replied by rodw on topic home build cnc cutting fabric machine
home build cnc cutting fabric machine
Category: Plasma & Laser
Time to create page: 0.252 seconds