Search Results (Searched for: )
- Dragan
- Dragan
11 Oct 2025 08:52
Replied by Dragan on topic NEW BUILD, need help with e-stop in tklinuxcnc
NEW BUILD, need help with e-stop in tklinuxcnc
Category: Basic Configuration
- Aciera

11 Oct 2025 07:34
- Hakan
- Hakan
11 Oct 2025 07:34 - 11 Oct 2025 07:35
Replied by Hakan on topic Ethercat drives not responding, mesa error finishing read
Ethercat drives not responding, mesa error finishing read
Category: EtherCAT
- Aciera
11 Oct 2025 07:29
- jefsaro

11 Oct 2025 07:15
- jefsaro
11 Oct 2025 07:13
- unknown
- unknown
11 Oct 2025 04:42
Replied by unknown on topic fixing "raspi firmware" errors on the official amd64 ISO
fixing "raspi firmware" errors on the official amd64 ISO
Category: Installing LinuxCNC
- kb58
- kb58
11 Oct 2025 04:19 - 11 Oct 2025 06:00
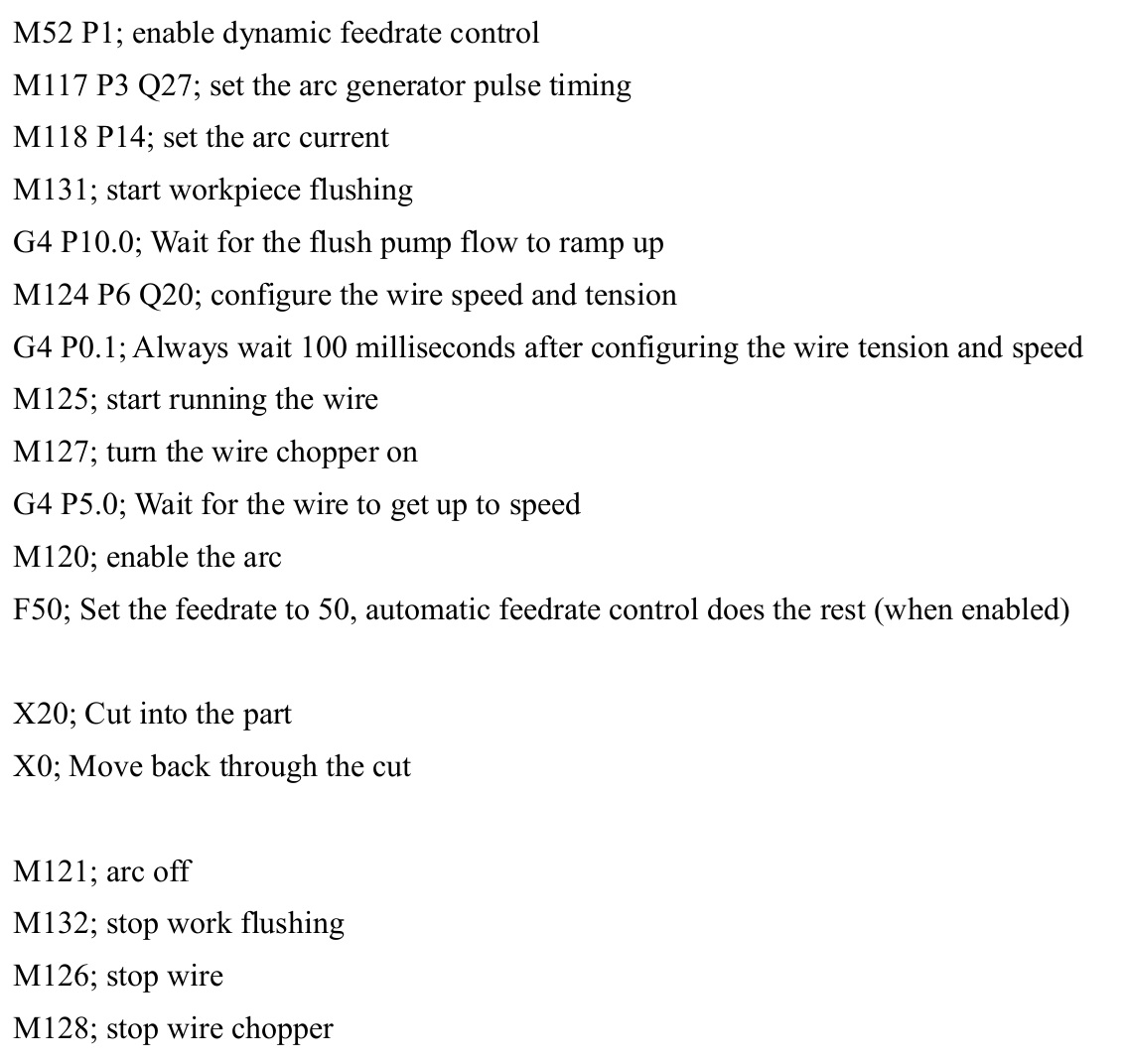
Single-stepping through a G-file was created by kb58
Single-stepping through a G-file
Category: General LinuxCNC Questions
- unknown
- unknown
11 Oct 2025 02:59
Replied by unknown on topic fixing "raspi firmware" errors on the official amd64 ISO
fixing "raspi firmware" errors on the official amd64 ISO
Category: Installing LinuxCNC
- tommylight

11 Oct 2025 02:51
Replied by tommylight on topic fixing "raspi firmware" errors on the official amd64 ISO
fixing "raspi firmware" errors on the official amd64 ISO
Category: Installing LinuxCNC
- COFHAL
- COFHAL
11 Oct 2025 02:10
Replied by COFHAL on topic AC Servo change to run
AC Servo change to run
Category: General LinuxCNC Questions
- unknown
- unknown
11 Oct 2025 01:44 - 11 Oct 2025 01:50
Replied by unknown on topic fixing "raspi firmware" errors on the official amd64 ISO
fixing "raspi firmware" errors on the official amd64 ISO
Category: Installing LinuxCNC
- Digger011
- Digger011
11 Oct 2025 01:07
Replied by Digger011 on topic Strugling with installation
Strugling with installation
Category: Installing LinuxCNC
- tommylight
11 Oct 2025 01:01
Replied by tommylight on topic Strugling with installation
Strugling with installation
Category: Installing LinuxCNC
")
- Digger011
- Digger011
11 Oct 2025 00:55
Replied by Digger011 on topic Strugling with installation
Strugling with installation
Category: Installing LinuxCNC
Time to create page: 3.906 seconds