Search Results (Searched for: )
- Revinvoss

16 Aug 2025 00:16
How to set qtdragon to re-face my spoilboard was created by Revinvoss
How to set qtdragon to re-face my spoilboard
Category: Qtvcp

- tommylight

16 Aug 2025 00:01
Replied by tommylight on topic getting started , latency and breakout board questions
getting started , latency and breakout board questions
Category: General LinuxCNC Questions
")
- Chock
- Chock
15 Aug 2025 22:59 - 15 Aug 2025 23:06
Replied by Chock on topic getting started , latency and breakout board questions
getting started , latency and breakout board questions
Category: General LinuxCNC Questions
- Chock
- Chock
15 Aug 2025 22:26 - 15 Aug 2025 22:37
Replied by Chock on topic getting started , latency and breakout board questions
getting started , latency and breakout board questions
Category: General LinuxCNC Questions
- PCW

15 Aug 2025 22:14
Replied by PCW on topic getting started , latency and breakout board questions
getting started , latency and breakout board questions
Category: General LinuxCNC Questions
- Chock
- Chock
15 Aug 2025 22:01 - 15 Aug 2025 22:08
Replied by Chock on topic getting started , latency and breakout board questions
getting started , latency and breakout board questions
Category: General LinuxCNC Questions
- scsmith1451

15 Aug 2025 20:47
Replied by scsmith1451 on topic Set program zero using XY positioning laser
Set program zero using XY positioning laser
Category: Advanced Configuration
- Martin.L
- Martin.L
15 Aug 2025 19:08 - 18 Aug 2025 06:10
Carousel ATC setup on Probe Basic was created by Martin.L
Carousel ATC setup on Probe Basic
Category: QtPyVCP
- PCW
15 Aug 2025 18:24 - 15 Aug 2025 18:27
Replied by PCW on topic MESA 7i97 - connection of DC Tach-Motors (2)
MESA 7i97 - connection of DC Tach-Motors (2)
Category: General LinuxCNC Questions
- Hartwig
- Hartwig
15 Aug 2025 18:16
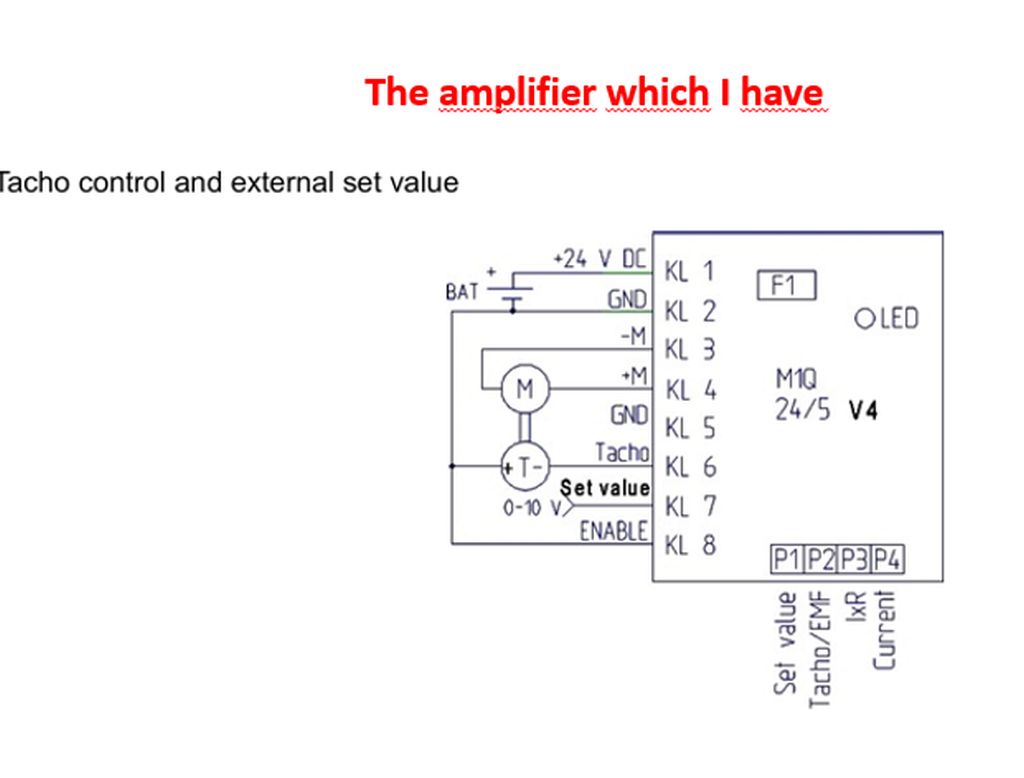
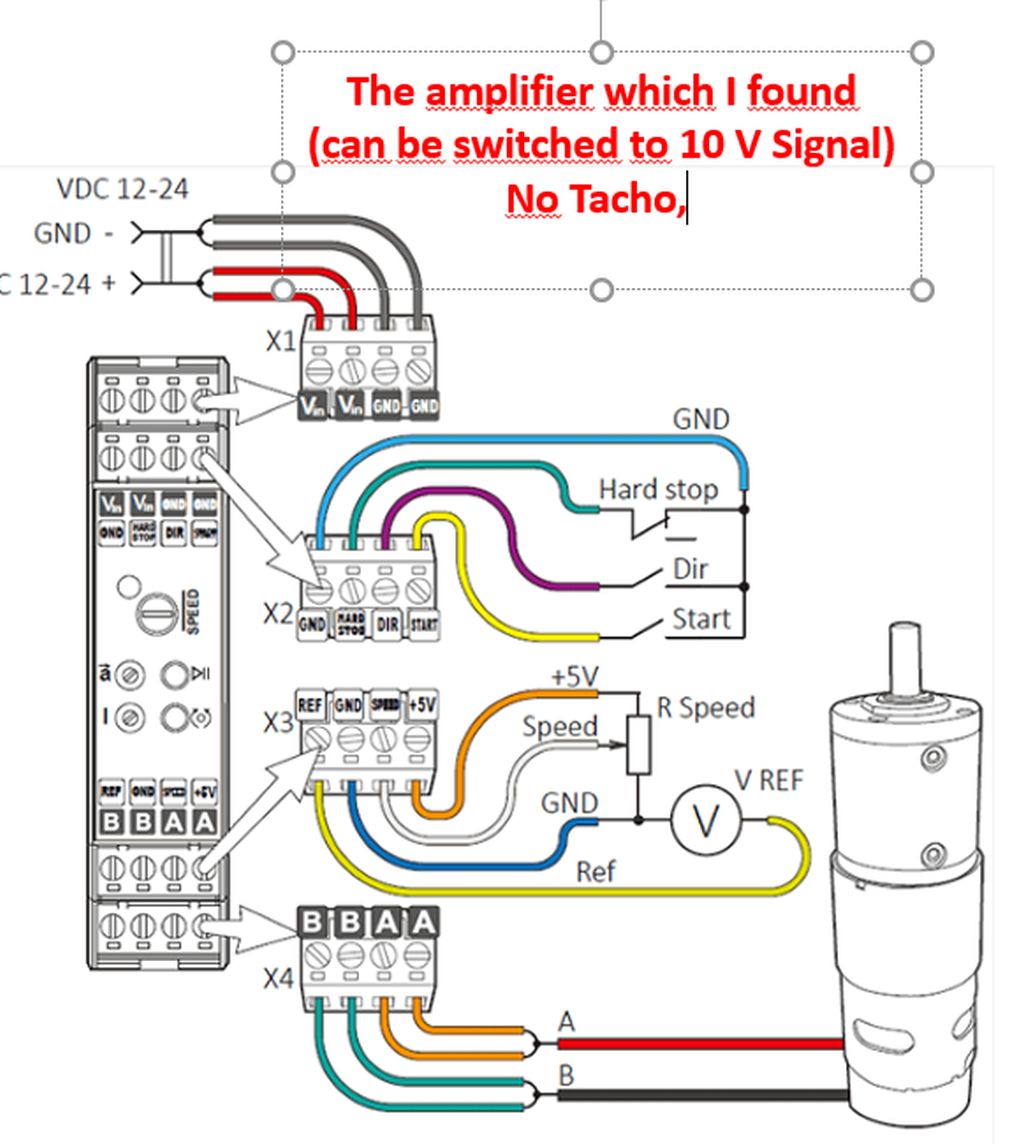
MESA 7i97 - connection of DC Tach-Motors (2) was created by Hartwig
MESA 7i97 - connection of DC Tach-Motors (2)
Category: General LinuxCNC Questions
- Hartwig
- Hartwig
15 Aug 2025 17:30
Replied by Hartwig on topic MESA 7i97 - connection of DC TachMotor amplifiers - power supplies
MESA 7i97 - connection of DC TachMotor amplifiers - power supplies
Category: General LinuxCNC Questions
- PCW
15 Aug 2025 17:29 - 15 Aug 2025 19:39
Replied by PCW on topic Mesa 7i96S step and direction signals go high on power loss
Mesa 7i96S step and direction signals go high on power loss
Category: Driver Boards
- satiowadahc

15 Aug 2025 17:24
Replied by satiowadahc on topic Mesa 7i96S step and direction signals go high on power loss
Mesa 7i96S step and direction signals go high on power loss
Category: Driver Boards
Time to create page: 0.842 seconds