Search Results (Searched for: )
- fully_defined
28 Dec 2024 08:08
Replied by fully_defined on topic Rotary Selector Switches & Resistors
Rotary Selector Switches & Resistors
Category: General LinuxCNC Questions

- RDA
- RDA
28 Dec 2024 07:22
- fully_defined
28 Dec 2024 06:39
Replied by fully_defined on topic Need help with Rotary position switch
Need help with Rotary position switch
Category: Turning
- ihavenofish
- ihavenofish
28 Dec 2024 05:25 - 28 Dec 2024 05:26
Replied by ihavenofish on topic PathPilot V2 source code
PathPilot V2 source code
Category: PathPilot
- fully_defined
28 Dec 2024 03:45
Replied by fully_defined on topic Rotary Selector Switches & Resistors
Rotary Selector Switches & Resistors
Category: General LinuxCNC Questions

- snowgoer540

28 Dec 2024 03:09 - 28 Dec 2024 03:11
Replied by snowgoer540 on topic PathPilot V2 source code
PathPilot V2 source code
Category: PathPilot
- Cant do this anymore bye all

28 Dec 2024 01:50
Replied by Cant do this anymore bye all on topic Is the encoder feedback loop inside 7i92 (5ABOB_Enc)?
Is the encoder feedback loop inside 7i92 (5ABOB_Enc)?
Category: Driver Boards
- ihavenofish
- ihavenofish
28 Dec 2024 01:23
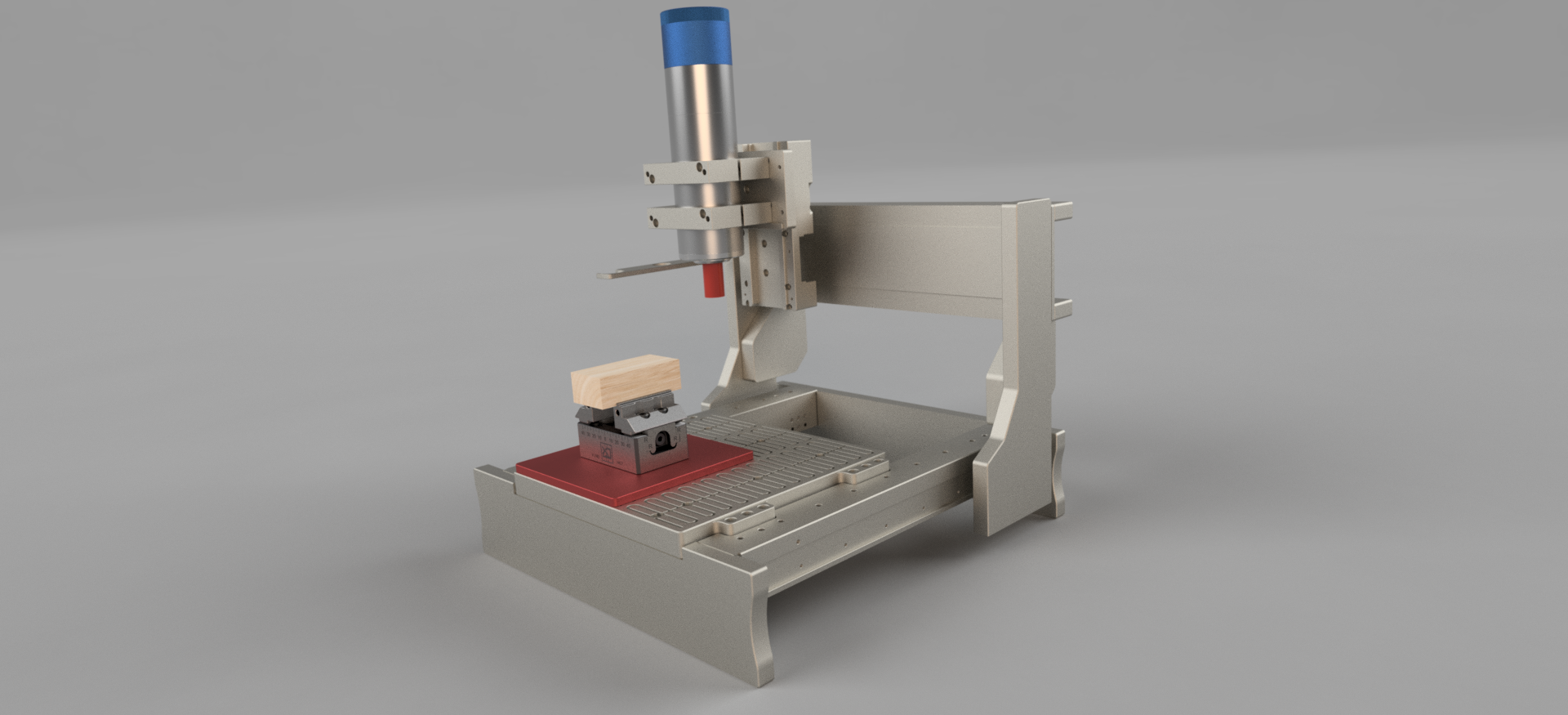
Replied by ihavenofish on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines

- ihavenofish
- ihavenofish
28 Dec 2024 01:22
Replied by ihavenofish on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines

")
- IronManDylan
- IronManDylan
28 Dec 2024 01:20
Replied by IronManDylan on topic Fast Hole EDM from Hacked Parts
Fast Hole EDM from Hacked Parts
Category: General LinuxCNC Questions
- IronManDylan
- IronManDylan
28 Dec 2024 01:18
How do I Update to 2.10 was created by IronManDylan
How do I Update to 2.10
Category: General LinuxCNC Questions
- ihavenofish
- ihavenofish
28 Dec 2024 01:18
Replied by ihavenofish on topic PathPilot V2 source code
PathPilot V2 source code
Category: PathPilot
- Dorro1971
- Dorro1971
28 Dec 2024 01:10
Replied by Dorro1971 on topic 5i25T Setup with PathPilot
5i25T Setup with PathPilot
Category: PathPilot
- mjones@welfab.ca
- mjones@welfab.ca
28 Dec 2024 00:31
Replied by mjones@welfab.ca on topic Min Max limit error on only one axis
Min Max limit error on only one axis
Category: General LinuxCNC Questions
- andypugh

28 Dec 2024 00:17
Replied by andypugh on topic Min Max limit error on only one axis
Min Max limit error on only one axis
Category: General LinuxCNC Questions
Time to create page: 0.638 seconds