As a little illustration I 'added' the skew-y to xyzbc tcp kinematics in what we might think would do the trick:
/**************************************************************************
* Copyright 2016 Rudy du Preez <rudy@asmsa.co.za>
*
* This program is free software; you can redistribute it and/or modify
* it under the terms of the GNU General Public License as published by
* the Free Software Foundation; either version 2 of the License, or
* (at your option) any later version.
*
* This program is distributed in the hope that it will be useful,
* but WITHOUT ANY WARRANTY; without even the implied warranty of
* MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
* GNU General Public License for more details.
*
* You should have received a copy of the GNU General Public License
* along with this program; if not, write to the Free Software
* Foundation, Inc., 51 Franklin Street, Fifth Floor, Boston, MA 02110-1301 USA.
**************************************************************************/
/********************************************************************
* Kinematics functions (forward,inverse) for:
* 1) 5 axis mill (XYZAC)
* This mill has a tilting table (A axis) and horizontal rotary
* mounted to the table (C axis).
* 2) 5 axis mill (XYZBC)
* This mill has a tilting table (B axis) and horizontal rotary
* mounted to the table (C axis).
*
* Note: The directions of the rotational axes are the opposite of the
* conventional axis directions. See
* https://linuxcnc.org/docs/html/gcode/machining-center.html
********************************************************************/
#include "motion.h"
#include "hal.h"
#include "rtapi_math.h"
#include "rtapi_string.h"
#include "rtapi_ctype.h"
static int trtfuncs_max_joints;
// joint number assignments (-1 ==> not assigned)
static int JX = -1;
static int JY = -1;
static int JZ = -1;
static int JA = -1;
static int JB = -1;
static int JC = -1;
static int JU = -1;
static int JV = -1;
static int JW = -1;
struct haldata {
hal_float_t *x_rot_point;
hal_float_t *y_rot_point;
hal_float_t *z_rot_point;
hal_float_t *x_offset;
hal_float_t *y_offset;
hal_float_t *z_offset;
hal_float_t *tool_offset;
hal_float_t *skew_y;
} *haldata;
int trtKinematicsSetup(const int comp_id,
const char* coordinates,
kparms* kp)
{
int i,jno,res=0;
int axis_idx_for_jno[EMCMOT_MAX_JOINTS];
int rqdjoints = strlen(kp->required_coordinates);
if (rqdjoints > kp->max_joints) {
rtapi_print_msg(RTAPI_MSG_ERR,
"ERROR %s: supports %d joints, <%s> requires %d\n",
kp->kinsname,
kp->max_joints,
coordinates,
rqdjoints);
goto error;
}
trtfuncs_max_joints = kp->max_joints;
if (map_coordinates_to_jnumbers(coordinates,
kp->max_joints,
kp->allow_duplicates,
axis_idx_for_jno)) {
goto error;
}
// require all chars in reqd_coords (order doesn't matter)
for (i=0; i < rqdjoints; i++) {
char reqd_char;
reqd_char = *(kp->required_coordinates + i);
if ( !strchr(coordinates,toupper(reqd_char))
&& !strchr(coordinates,tolower(reqd_char)) ) {
rtapi_print_msg(RTAPI_MSG_ERR,
"ERROR %s:\nrequired coordinates:%s\n"
"specified coordinates:%s\n",
kp->kinsname, kp->required_coordinates, coordinates);
goto error;
}
}
// assign principal joint numbers (first found in coordinates map)
// duplicates are handled by position_to_mapped_joints()
for (jno=0; jno < EMCMOT_MAX_JOINTS; jno++) {
if (axis_idx_for_jno[jno] == 0 && JX==-1) {JX = jno;}
if (axis_idx_for_jno[jno] == 1 && JY==-1) {JY = jno;}
if (axis_idx_for_jno[jno] == 2 && JZ==-1) {JZ = jno;}
if (axis_idx_for_jno[jno] == 3 && JA==-1) {JA = jno;}
if (axis_idx_for_jno[jno] == 4 && JB==-1) {JB = jno;}
if (axis_idx_for_jno[jno] == 5 && JC==-1) {JC = jno;}
if (axis_idx_for_jno[jno] == 6 && JU==-1) {JU = jno;}
if (axis_idx_for_jno[jno] == 7 && JV==-1) {JV = jno;}
if (axis_idx_for_jno[jno] == 8 && JW==-1) {JW = jno;}
}
rtapi_print("%s coordinates=%s assigns:\n", kp->kinsname,coordinates);
for (jno=0; jno<EMCMOT_MAX_JOINTS; jno++) {
if (axis_idx_for_jno[jno] == -1) break; //fini
rtapi_print(" Joint %d ==> Axis %c\n",
jno,"XYZABCUVW"[axis_idx_for_jno[jno]]);
}
haldata = hal_malloc(sizeof(struct haldata));
if (!haldata) {goto error;}
res += hal_pin_float_newf(HAL_IN, &;(haldata->x_rot_point), comp_id,
"%s.x-rot-point",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &;(haldata->y_rot_point), comp_id,
"%s.y-rot-point",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &;(haldata->z_rot_point), comp_id,
"%s.z-rot-point",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &;(haldata->x_offset), comp_id,
"%s.x-offset",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &;(haldata->y_offset), comp_id,
"%s.y-offset",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &;(haldata->z_offset), comp_id,
"%s.z-offset",kp->halprefix);
res += hal_pin_float_newf(HAL_IN, &;(haldata->tool_offset), comp_id,
"%s.tool-offset",kp->halprefix);
res += hal_pin_float_newf(HAL_IN ,&;(haldata->skew_y) , comp_id,
"%s.skew-y" ,kp->halprefix);
if (res) {goto error;}
return 0;
error:
rtapi_print_msg(RTAPI_MSG_ERR,"trtKinematicsSetup() FAIL\n");
return -1;
} // trtKinematicsSetup()
int xyzacKinematicsForward(const double *joints,
EmcPose * pos,
const KINEMATICS_FORWARD_FLAGS * fflags,
KINEMATICS_INVERSE_FLAGS * iflags)
{
double x_rot_point = *(haldata->x_rot_point);
double y_rot_point = *(haldata->y_rot_point);
double z_rot_point = *(haldata->z_rot_point);
double dt = *(haldata->tool_offset);
double dy = *(haldata->y_offset);
double dz = *(haldata->z_offset);
double a_rad = joints[JA]*TO_RAD;
double c_rad = joints[JC]*TO_RAD;
dz = dz + dt;
pos->tran.x = + cos(c_rad) * (joints[JX] - x_rot_point)
+ sin(c_rad) * cos(a_rad) * (joints[JY] - dy - y_rot_point)
+ sin(c_rad) * sin(a_rad) * (joints[JZ] - dz - z_rot_point)
+ sin(c_rad) * dy
+ x_rot_point;
pos->tran.y = - sin(c_rad) * (joints[JX] - x_rot_point)
+ cos(c_rad) * cos(a_rad) * (joints[JY] - dy - y_rot_point)
+ cos(c_rad) * sin(a_rad) * (joints[JZ] - dz - z_rot_point)
+ cos(c_rad) * dy
+ y_rot_point;
pos->tran.z = + 0
- sin(a_rad) * (joints[JY] - dy - y_rot_point)
+ cos(a_rad) * (joints[JZ] - dz - z_rot_point)
+ dz
+ z_rot_point;
pos->a = joints[JA];
pos->c = joints[JC];
// optional letters (specify with coordinates module parameter)
pos->b = (JB != -1)? joints[JB] : 0;
pos->u = (JU != -1)? joints[JU] : 0;
pos->v = (JV != -1)? joints[JV] : 0;
pos->w = (JW != -1)? joints[JW] : 0;
return 0;
} // xyzacKinematicsForward()
int xyzacKinematicsInverse(const EmcPose * pos,
double *joints,
const KINEMATICS_INVERSE_FLAGS * iflags,
KINEMATICS_FORWARD_FLAGS * fflags)
{
double x_rot_point = *(haldata->x_rot_point);
double y_rot_point = *(haldata->y_rot_point);
double z_rot_point = *(haldata->z_rot_point);
double dy = *(haldata->y_offset);
double dz = *(haldata->z_offset);
double dt = *(haldata->tool_offset);
double a_rad = pos->a*TO_RAD;
double c_rad = pos->c*TO_RAD;
EmcPose P; // computed position
dz = dz + dt;
P.tran.x = + cos(c_rad) * (pos->tran.x - x_rot_point)
- sin(c_rad) * (pos->tran.y - y_rot_point)
+ x_rot_point;
P.tran.y = + sin(c_rad) * cos(a_rad) * (pos->tran.x - x_rot_point)
+ cos(c_rad) * cos(a_rad) * (pos->tran.y - y_rot_point)
- sin(a_rad) * (pos->tran.z - z_rot_point)
- cos(a_rad) * dy
+ sin(a_rad) * dz
+ dy
+ y_rot_point;
P.tran.z = + sin(c_rad) * sin(a_rad) * (pos->tran.x - x_rot_point)
+ cos(c_rad) * sin(a_rad) * (pos->tran.y - y_rot_point)
+ cos(a_rad) * (pos->tran.z - z_rot_point)
- sin(a_rad) * dy
- cos(a_rad) * dz
+ dz
+ z_rot_point;
P.a = pos->a;
P.c = pos->c;
// optional letters (specify with coordinates module parameter)
P.b = (JB != -1)? pos->b : 0;
P.u = (JU != -1)? pos->u : 0;
P.v = (JV != -1)? pos->v : 0;
P.w = (JW != -1)? pos->w : 0;
// update joints with support for
// multiple-joints per-coordinate letter:
// based on computed position
position_to_mapped_joints(trtfuncs_max_joints,
&P,
joints);
return 0;
} // xyzacKinematicsInverse()
int xyzbcKinematicsForward(const double *joints,
EmcPose * pos,
const KINEMATICS_FORWARD_FLAGS * fflags,
KINEMATICS_INVERSE_FLAGS * iflags)
{
// Note: 'principal' joints are used
double x_rot_point = *(haldata->x_rot_point);
double y_rot_point = *(haldata->y_rot_point);
double z_rot_point = *(haldata->z_rot_point);
double dx = *(haldata->x_offset);
double dz = *(haldata->z_offset);
double dt = *(haldata->tool_offset);
double skew_y = *(haldata->skew_y);
dz = dz + dt;
double b_rad = joints[JB]*TO_RAD;
double c_rad = joints[JC]*TO_RAD;
pos->tran.x = cos(c_rad) * cos(b_rad) * ((joints[JX] - dx - x_rot_point)+(joints[JY]- y_rot_point)*skew_y)
+ sin(c_rad) * (joints[JY] - y_rot_point)
- cos(c_rad) * sin(b_rad) * (joints[JZ] - dz - z_rot_point)
+ cos(c_rad) * dx
+ x_rot_point;
pos->tran.y = - sin(c_rad) * cos(b_rad) * ((joints[JX] - dx - x_rot_point)+(joints[JY]- y_rot_point)*skew_y)
+ cos(c_rad) * (joints[JY] - y_rot_point)
+ sin(c_rad) * sin(b_rad) * (joints[JZ] - dz - z_rot_point)
- sin(c_rad) * dx
+ y_rot_point;
pos->tran.z = sin(b_rad) * ((joints[JX] - dx - x_rot_point)+(joints[JY]- y_rot_point)*skew_y)
+ cos(b_rad) * (joints[JZ] - dz - z_rot_point)
+ dz
+ z_rot_point;
pos->b = joints[JB];
pos->c = joints[JC];
// optional letters (specify with coordinates module parameter)
pos->a = (JA != -1)? joints[JA] : 0;
pos->u = (JU != -1)? joints[JU] : 0;
pos->v = (JV != -1)? joints[JV] : 0;
pos->w = (JW != -1)? joints[JW] : 0;
return 0;
} // xyzbcKinematicsForward()
int xyzbcKinematicsInverse(const EmcPose * pos,
double *joints,
const KINEMATICS_INVERSE_FLAGS * iflags,
KINEMATICS_FORWARD_FLAGS * fflags)
{
double x_rot_point = *(haldata->x_rot_point);
double y_rot_point = *(haldata->y_rot_point);
double z_rot_point = *(haldata->z_rot_point);
double dx = *(haldata->x_offset);
double dz = *(haldata->z_offset);
double dt = *(haldata->tool_offset);
double skew_y = *(haldata->skew_y);
dz = dz + dt;
double b_rad = pos->b*TO_RAD;
double c_rad = pos->c*TO_RAD;
double dpx = -cos(b_rad)*dx - sin(b_rad)*dz + dx;
double dpz = sin(b_rad)*dx - cos(b_rad)*dz + dz;
EmcPose P; // computed position
P.tran.x = + cos(c_rad) * cos(b_rad) * ((pos->tran.x - x_rot_point) - (pos->tran.y - y_rot_point)*skew_y)
- sin(c_rad) * cos(b_rad) * (pos->tran.y - y_rot_point)
+ sin(b_rad) * (pos->tran.z - z_rot_point)
+ dpx
+ x_rot_point;
P.tran.y = + sin(c_rad) * ((pos->tran.x - x_rot_point) - (pos->tran.y - y_rot_point)*skew_y)
+ cos(c_rad) * (pos->tran.y - y_rot_point)
+ y_rot_point;
P.tran.z = - cos(c_rad) * sin(b_rad) * ((pos->tran.x - x_rot_point) - (pos->tran.y - y_rot_point)*skew_y)
+ sin(c_rad) * sin(b_rad) * (pos->tran.y - y_rot_point)
+ cos(b_rad) * (pos->tran.z - z_rot_point)
+ dpz
+ z_rot_point;
P.b = pos->b;
P.c = pos->c;
// optional letters (specify with coordinates module parameter)
P.a = (JA != -1)? pos->a : 0;
P.u = (JU != -1)? pos->u : 0;
P.v = (JV != -1)? pos->v : 0;
P.w = (JW != -1)? pos->w : 0;
// update joints with support for
// multiple-joints per-coordinate letter:
// based on computed position
position_to_mapped_joints(trtfuncs_max_joints,
&P,
joints);
return 0;
} // xyzbcKinematicsInverse()
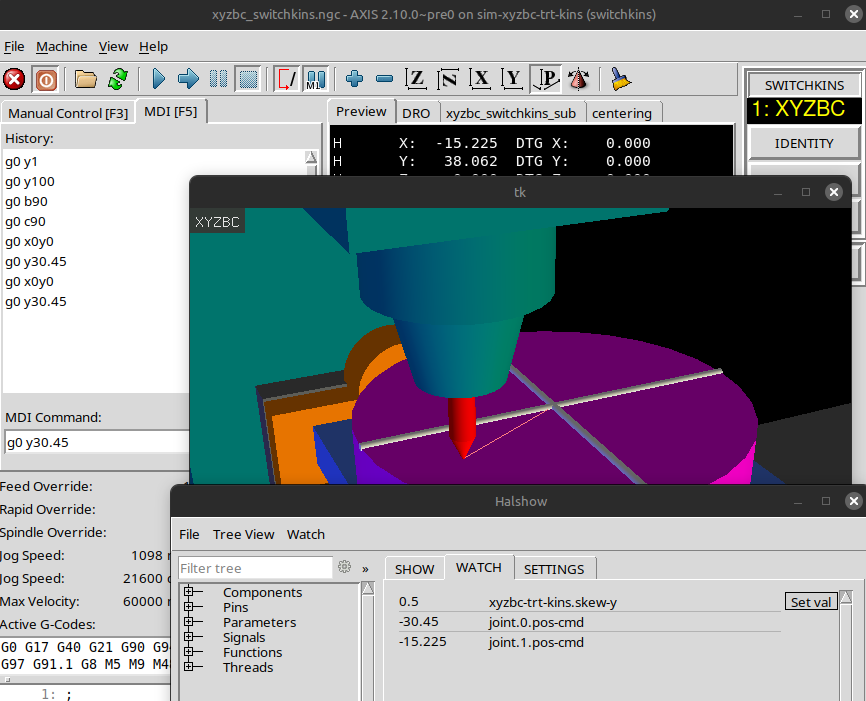
Note that things seem to look great when we start out with no rotation of the table:
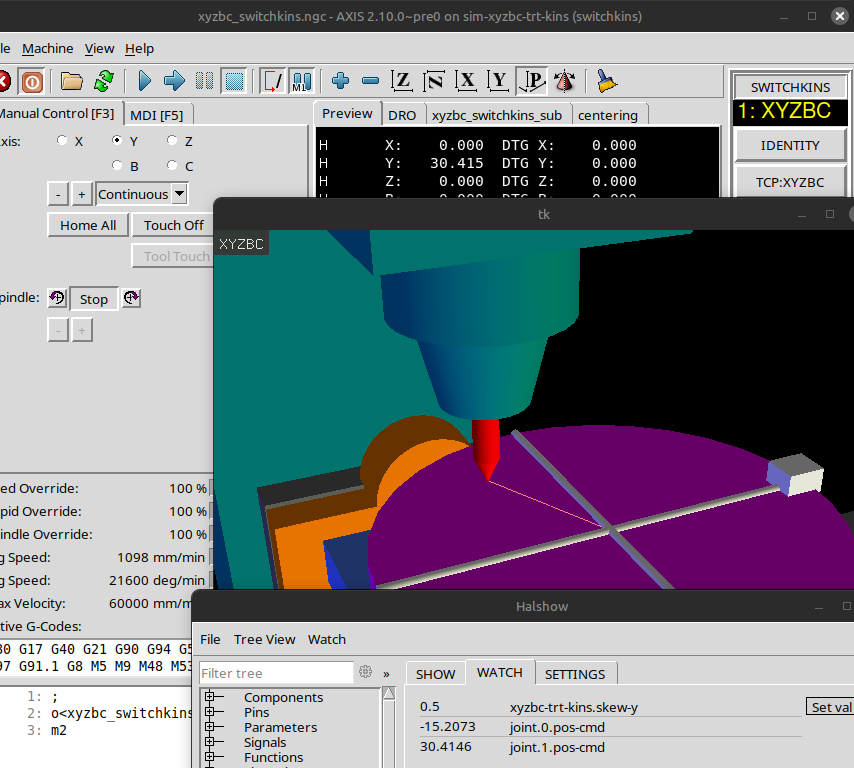
However when we rotate the table 90° we realize that we have actually skewed the Work Coordinate system: