Search Results (Searched for: )
- matasbuk
- matasbuk
04 Aug 2025 06:32
LinuxCNC randomly crashes reportedly due to Python bug was created by matasbuk
LinuxCNC randomly crashes reportedly due to Python bug
Category: Advanced Configuration
- Aciera

04 Aug 2025 06:13
Replied by Aciera on topic Help with "Step Timing Calculator"
Help with "Step Timing Calculator"
Category: StepConf Wizard
- tsaG
- tsaG
04 Aug 2025 05:42
- MaxEkb77

04 Aug 2025 03:24
Replied by MaxEkb77 on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT

- Gautham
- Gautham
04 Aug 2025 03:08
Replied by Gautham on topic Using a rotary encoder for Homing A-Axis on 7i96s
Using a rotary encoder for Homing A-Axis on 7i96s
Category: Driver Boards
- Lcvette

04 Aug 2025 02:52
Replied by Lcvette on topic Surfacemap Z compensation with Probe Basic
Surfacemap Z compensation with Probe Basic
Category: QtPyVCP
- Lcvette
04 Aug 2025 02:50
Replied by Lcvette on topic Surfacemap Z compensation with Probe Basic
Surfacemap Z compensation with Probe Basic
Category: QtPyVCP
- Lcvette
04 Aug 2025 02:48
Replied by Lcvette on topic "KeyError" suddenly appears after moving a limitswitch
"KeyError" suddenly appears after moving a limitswitch
Category: QtPyVCP
- Lcvette
04 Aug 2025 02:44
- rebelx
- rebelx
04 Aug 2025 02:26 - 05 Aug 2025 00:50
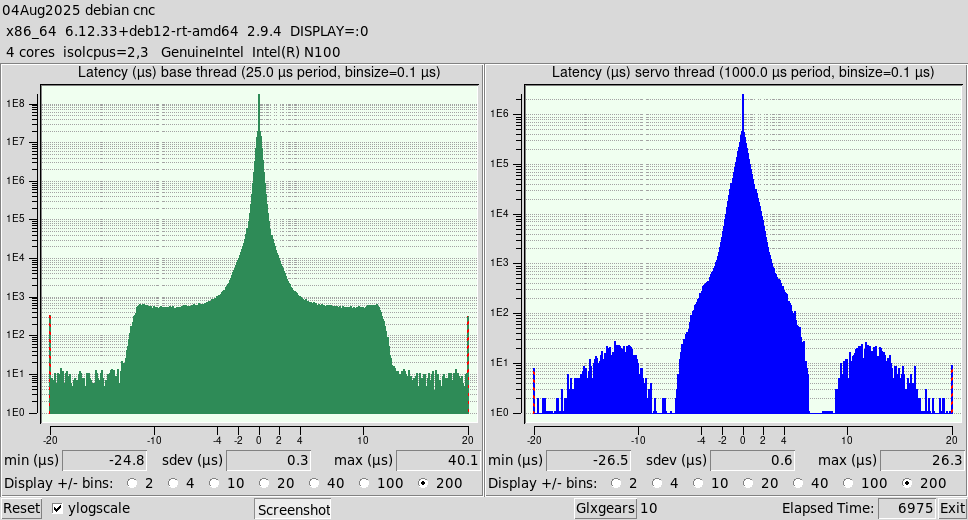
Replied by rebelx on topic linuxcnc 2.9.2 (live) on the intel n100 cpu
linuxcnc 2.9.2 (live) on the intel n100 cpu
Category: Computers and Hardware

- PCW

04 Aug 2025 02:17 - 04 Aug 2025 02:17
Replied by PCW on topic Mesaflash is not able to find 5i25
Mesaflash is not able to find 5i25
Category: Driver Boards
Time to create page: 0.808 seconds