Search Results (Searched for: )
- tommylight

07 Aug 2024 15:57
Replied by tommylight on topic Latency Test OK, dennoch Fehlermeldung
Latency Test OK, dennoch Fehlermeldung
Category: Deutsch
- papagno-source
- papagno-source
07 Aug 2024 15:54
- Mecanix
- Mecanix
07 Aug 2024 15:42
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Mecanix
- Mecanix
07 Aug 2024 15:32
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- amanker
- amanker
07 Aug 2024 14:54
Replied by amanker on topic Need Help in XYZAC configuration.
Need Help in XYZAC configuration.
Category: Advanced Configuration
- CNC_Tinkerer
- CNC_Tinkerer
07 Aug 2024 14:46
Replied by CNC_Tinkerer on topic Latency, error finishing read, and IRQ affinity
Latency, error finishing read, and IRQ affinity
Category: General LinuxCNC Questions
- PCW

07 Aug 2024 14:36 - 07 Aug 2024 16:07
Replied by PCW on topic Latency Test OK, dennoch Fehlermeldung
Latency Test OK, dennoch Fehlermeldung
Category: Deutsch
- Muftijaja
- Muftijaja
07 Aug 2024 14:31
Replied by Muftijaja on topic Latency Test OK, dennoch Fehlermeldung
Latency Test OK, dennoch Fehlermeldung
Category: Deutsch
- CNC_Tinkerer
- CNC_Tinkerer
07 Aug 2024 14:27 - 07 Aug 2024 14:33
Replied by CNC_Tinkerer on topic Latency, error finishing read, and IRQ affinity
Latency, error finishing read, and IRQ affinity
Category: General LinuxCNC Questions
- DoWerna

07 Aug 2024 14:15
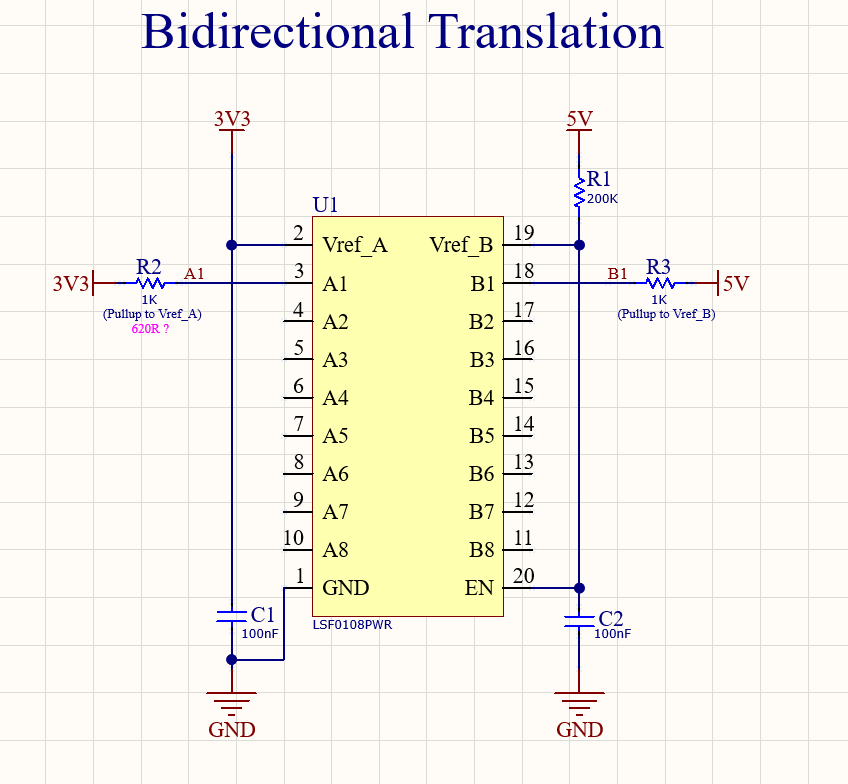
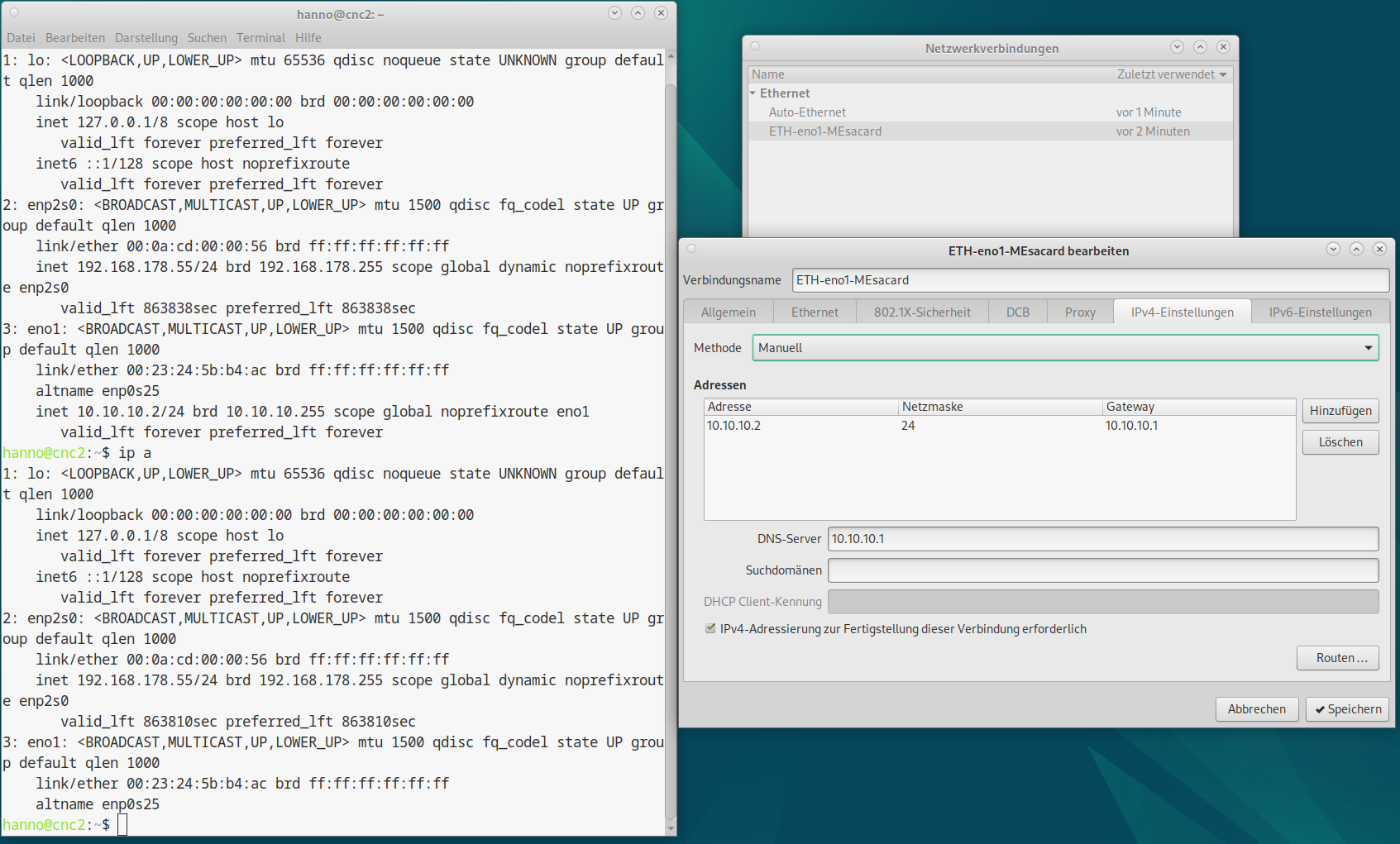
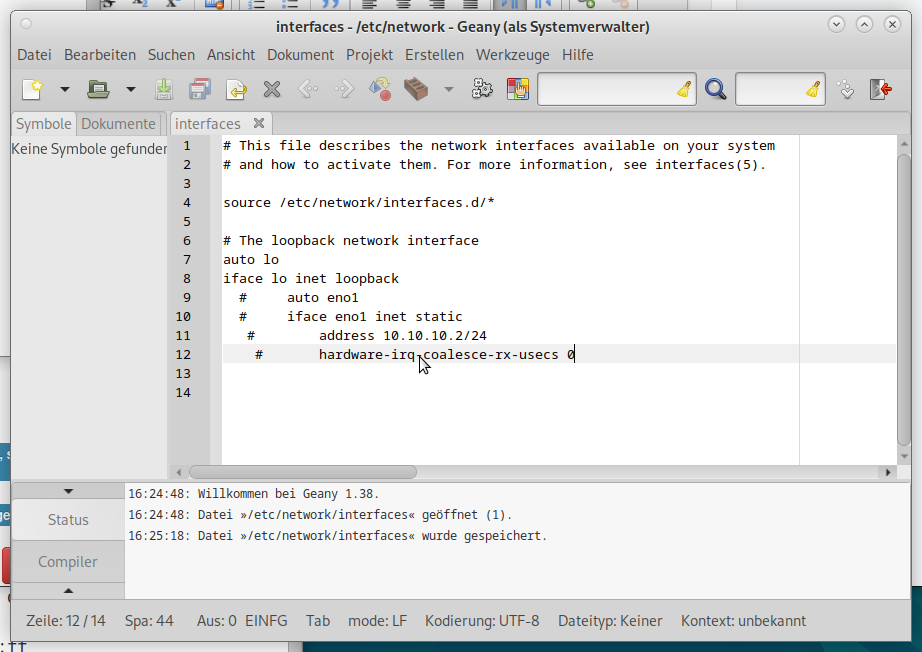
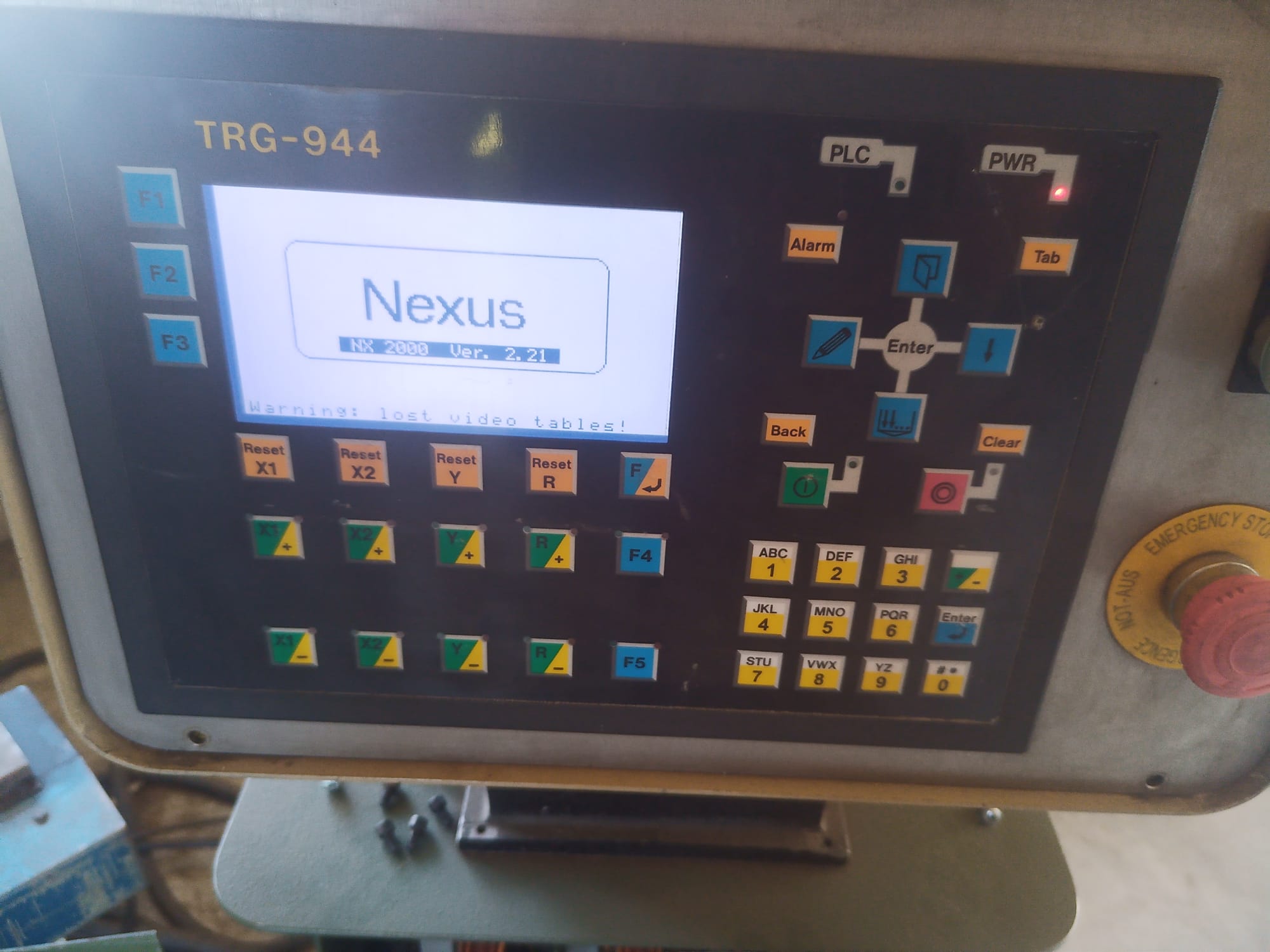
Retrofitting a small bending machine was created by DoWerna
Retrofitting a small bending machine
Category: CNC Machines

- JamesHoward
- JamesHoward
07 Aug 2024 13:56
Replied by JamesHoward on topic Is a parport fast enough?
Is a parport fast enough?
Category: General LinuxCNC Questions
- PCW
07 Aug 2024 13:37 - 07 Aug 2024 13:39
Replied by PCW on topic Latency Test OK, dennoch Fehlermeldung
Latency Test OK, dennoch Fehlermeldung
Category: Deutsch
- Sami
- Sami
07 Aug 2024 13:13
Replied by Sami on topic Pc reboot / 5i25(6i25) & 7i77
Pc reboot / 5i25(6i25) & 7i77
Category: Computers and Hardware
- rdtsc

07 Aug 2024 13:04
Replied by rdtsc on topic Help me setting up My LinuxCNC
Help me setting up My LinuxCNC
Category: Basic Configuration
- tommylight
07 Aug 2024 12:50
Replied by tommylight on topic Pc reboot / 5i25(6i25) & 7i77
Pc reboot / 5i25(6i25) & 7i77
Category: Computers and Hardware
Time to create page: 0.870 seconds