Search Results (Searched for: )
- Aciera

01 Aug 2024 19:34
- Grotius

01 Aug 2024 19:31
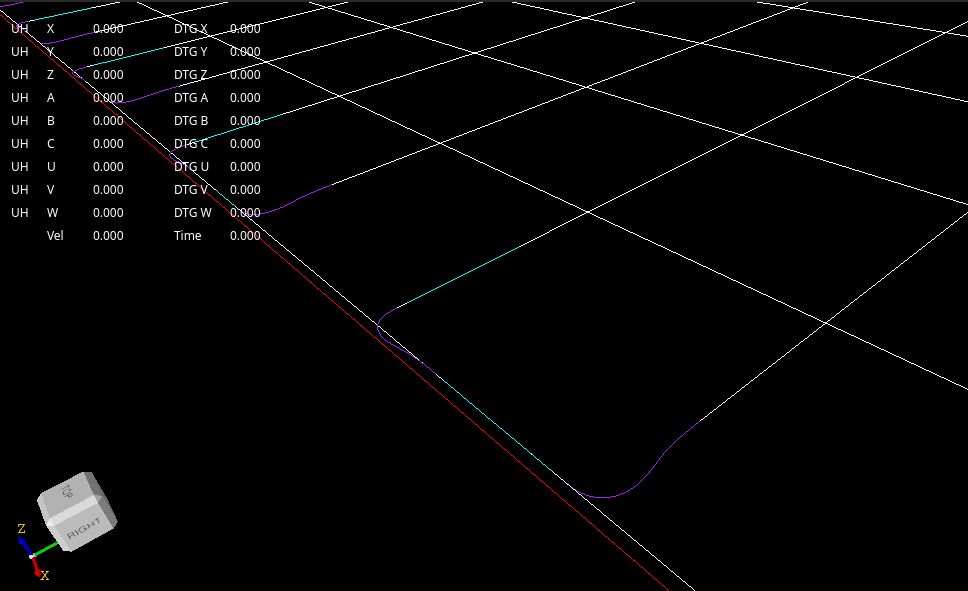
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- jg00163206
01 Aug 2024 19:28
- cnbbom
- cnbbom
01 Aug 2024 19:12
Replied by cnbbom on topic help with installation
help with installation
Category: Installing LinuxCNC
- Cant do this anymore bye all

01 Aug 2024 19:01
Replied by Cant do this anymore bye all on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Aciera
01 Aug 2024 18:55
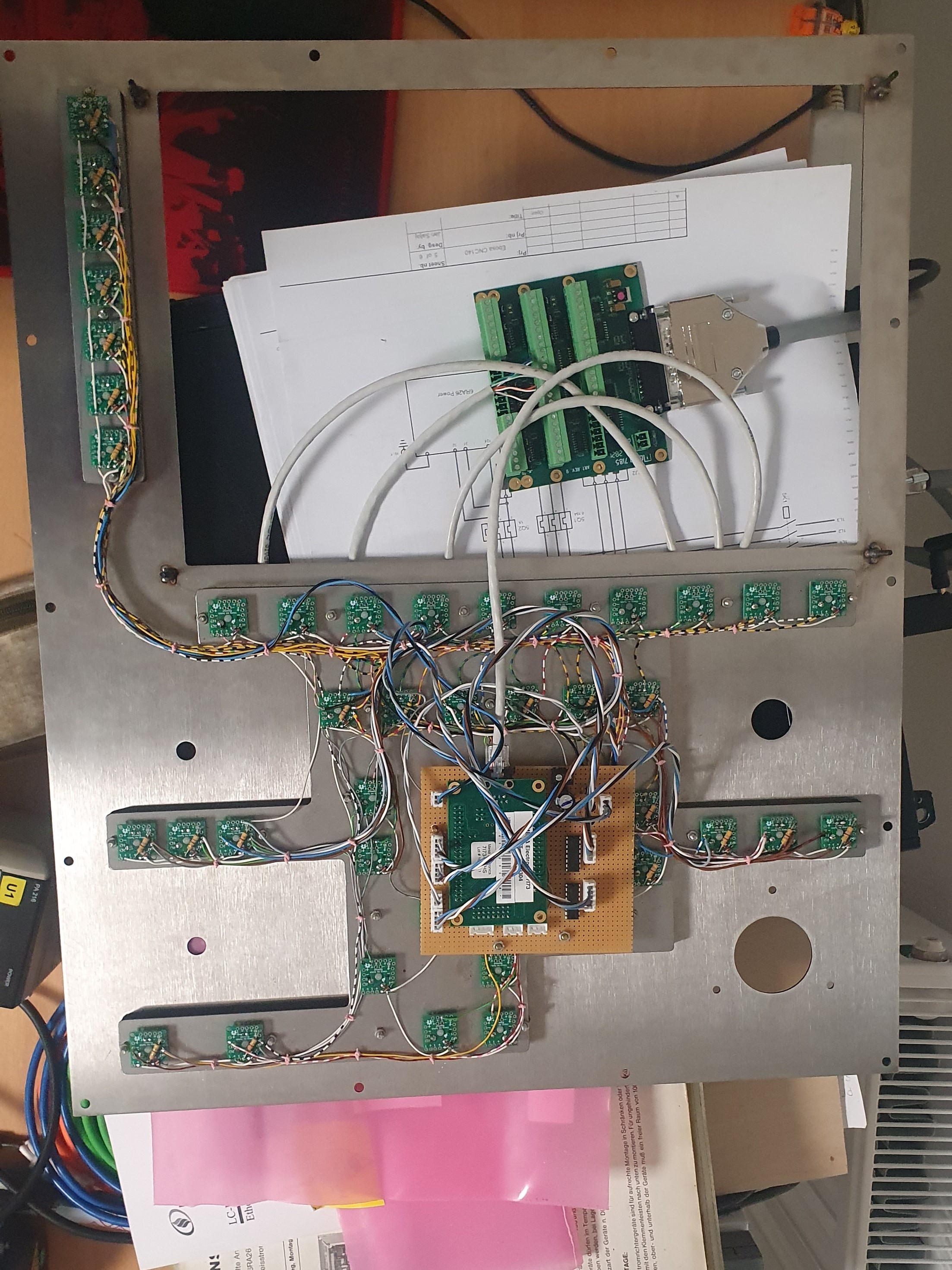
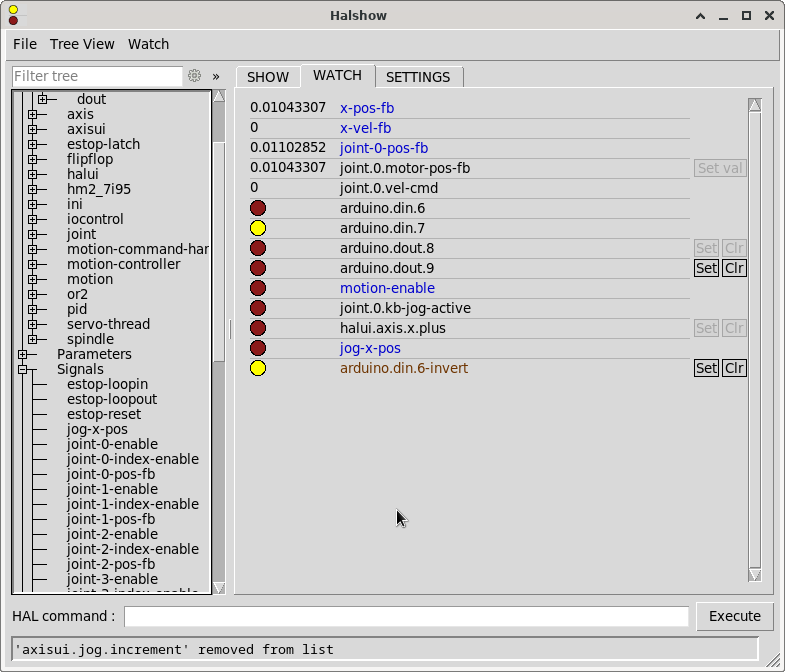
Replied by Aciera on topic Data transfer LinuxCNC to / from custom board - Solved
Data transfer LinuxCNC to / from custom board - Solved
Category: Advanced Configuration

- ffffrf
- ffffrf
01 Aug 2024 18:47
Replied by ffffrf on topic help with millrun and/or custom Z-X-A(or C) lathe/machine
help with millrun and/or custom Z-X-A(or C) lathe/machine
Category: Fusion 360
- Aciera
01 Aug 2024 18:43
Replied by Aciera on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions

- tjtr33

01 Aug 2024 18:24
Replied by tjtr33 on topic Running Axis remotely with Nomachine's NX v3.5
Running Axis remotely with Nomachine's NX v3.5
Category: AXIS
- tommylight

01 Aug 2024 18:17
Replied by tommylight on topic help with installation
help with installation
Category: Installing LinuxCNC
- trisa25
- trisa25
01 Aug 2024 18:01

- meister
- meister
01 Aug 2024 18:01
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware

- slowpoke
- slowpoke
01 Aug 2024 17:59 - 01 Aug 2024 18:18
Replied by slowpoke on topic Data transfer LinuxCNC to / from custom board - Solved
Data transfer LinuxCNC to / from custom board - Solved
Category: Advanced Configuration

- Grotius
01 Aug 2024 17:54 - 01 Aug 2024 18:04
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions

- Mecanix
- Mecanix
01 Aug 2024 17:42
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
Time to create page: 0.850 seconds