Search Results (Searched for: )
- RMJ fabrication
- RMJ fabrication
08 Jul 2024 20:32
Replied by RMJ fabrication on topic qtplasmac (Operation Error: hm2/hm2_7i76e.0:) in middle of cut
qtplasmac (Operation Error: hm2/hm2_7i76e.0:) in middle of cut
Category: Plasmac
- Grotius

08 Jul 2024 20:18
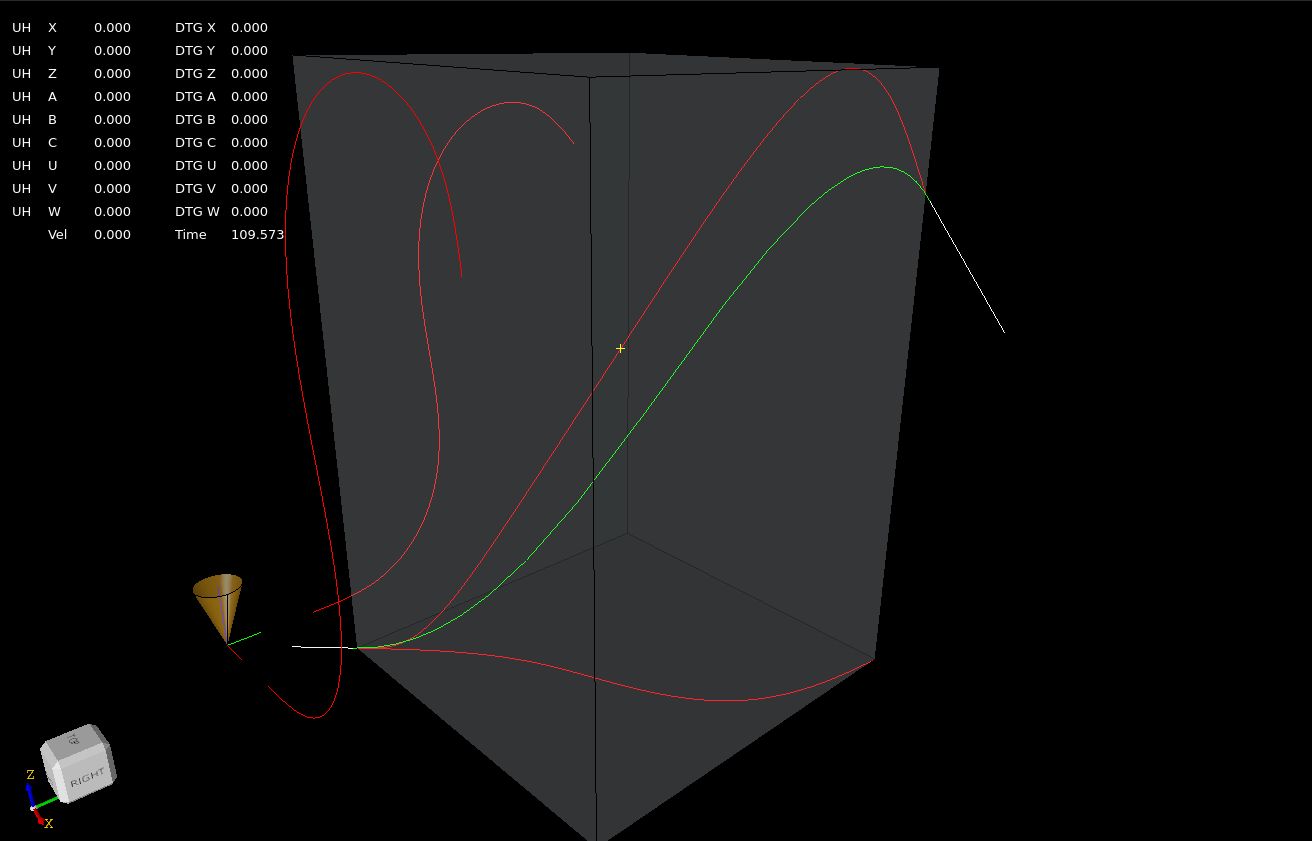
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- rodw

08 Jul 2024 20:17
Replied by rodw on topic Override set_default_blending
Override set_default_blending
Category: Plasmac
- andypugh

08 Jul 2024 20:13
Replied by andypugh on topic Data transfer LinuxCNC to / from custom board - Solved
Data transfer LinuxCNC to / from custom board - Solved
Category: Advanced Configuration
- meister
- meister
08 Jul 2024 20:05
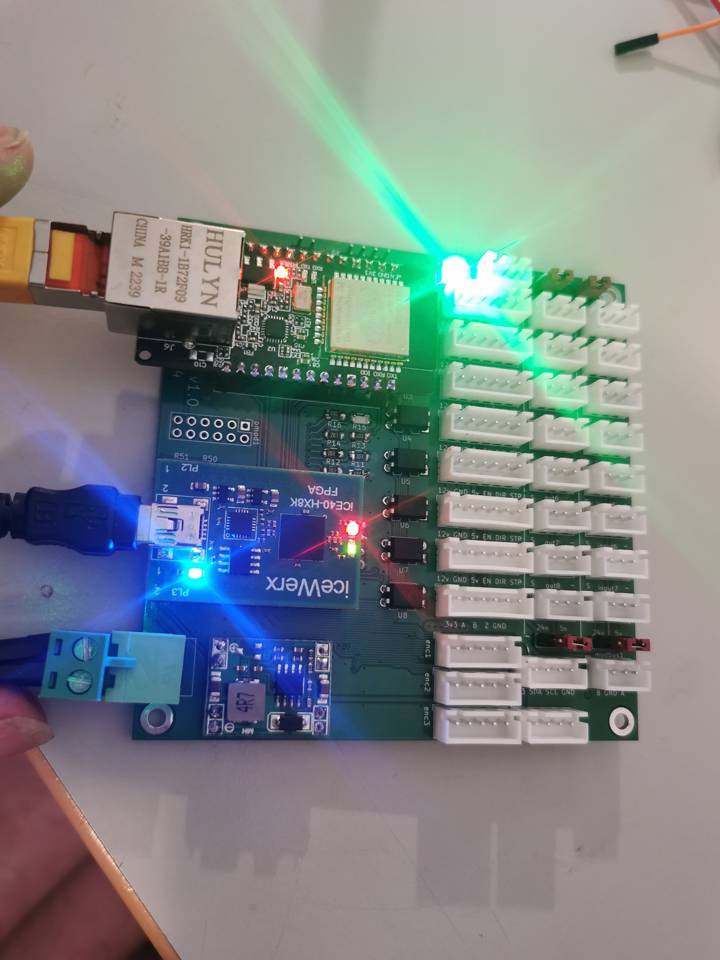
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Cant do this anymore bye all

08 Jul 2024 20:03
Replied by Cant do this anymore bye all on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- HerrNamenlos123

08 Jul 2024 19:46 - 08 Jul 2024 19:51
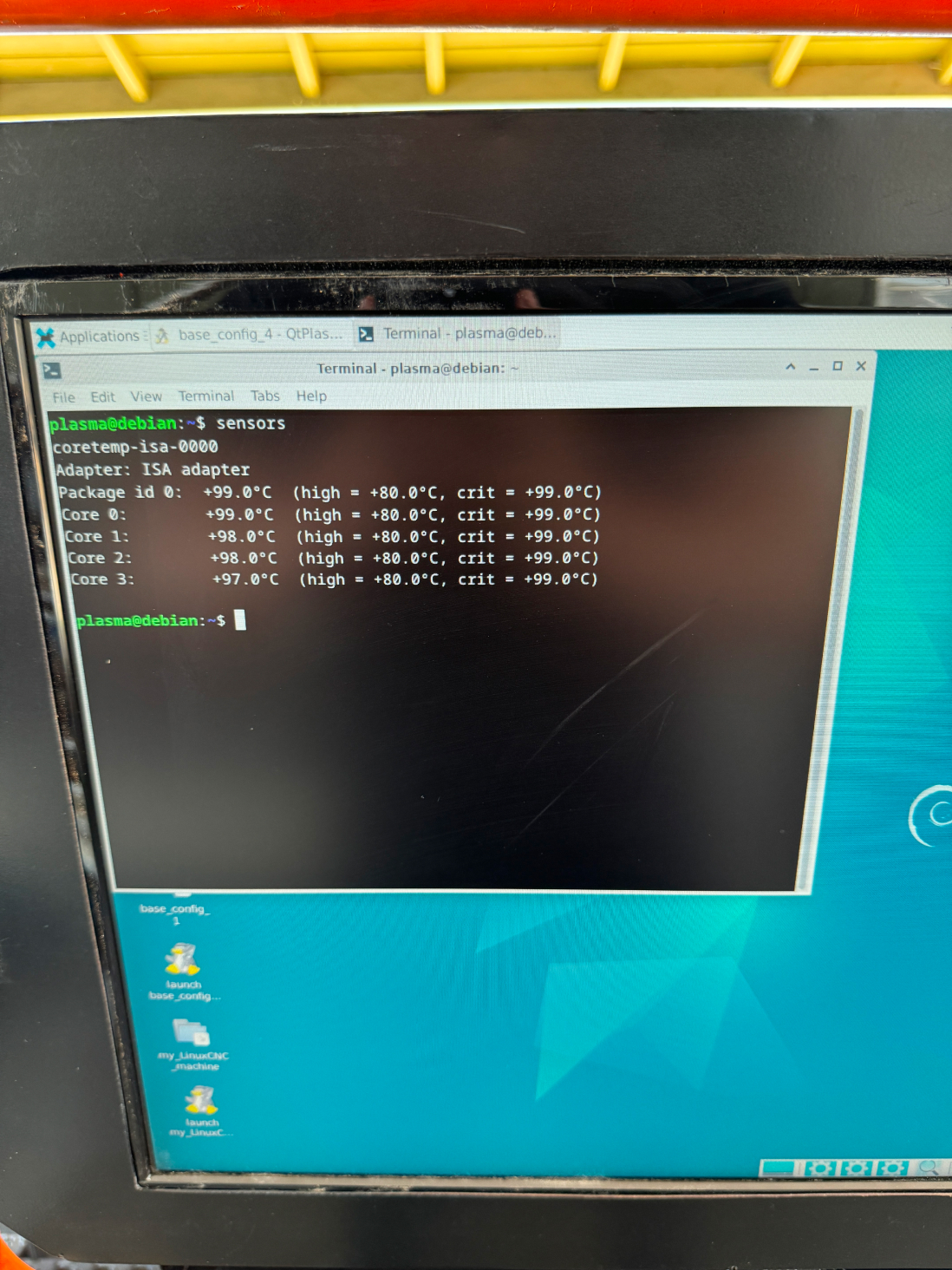
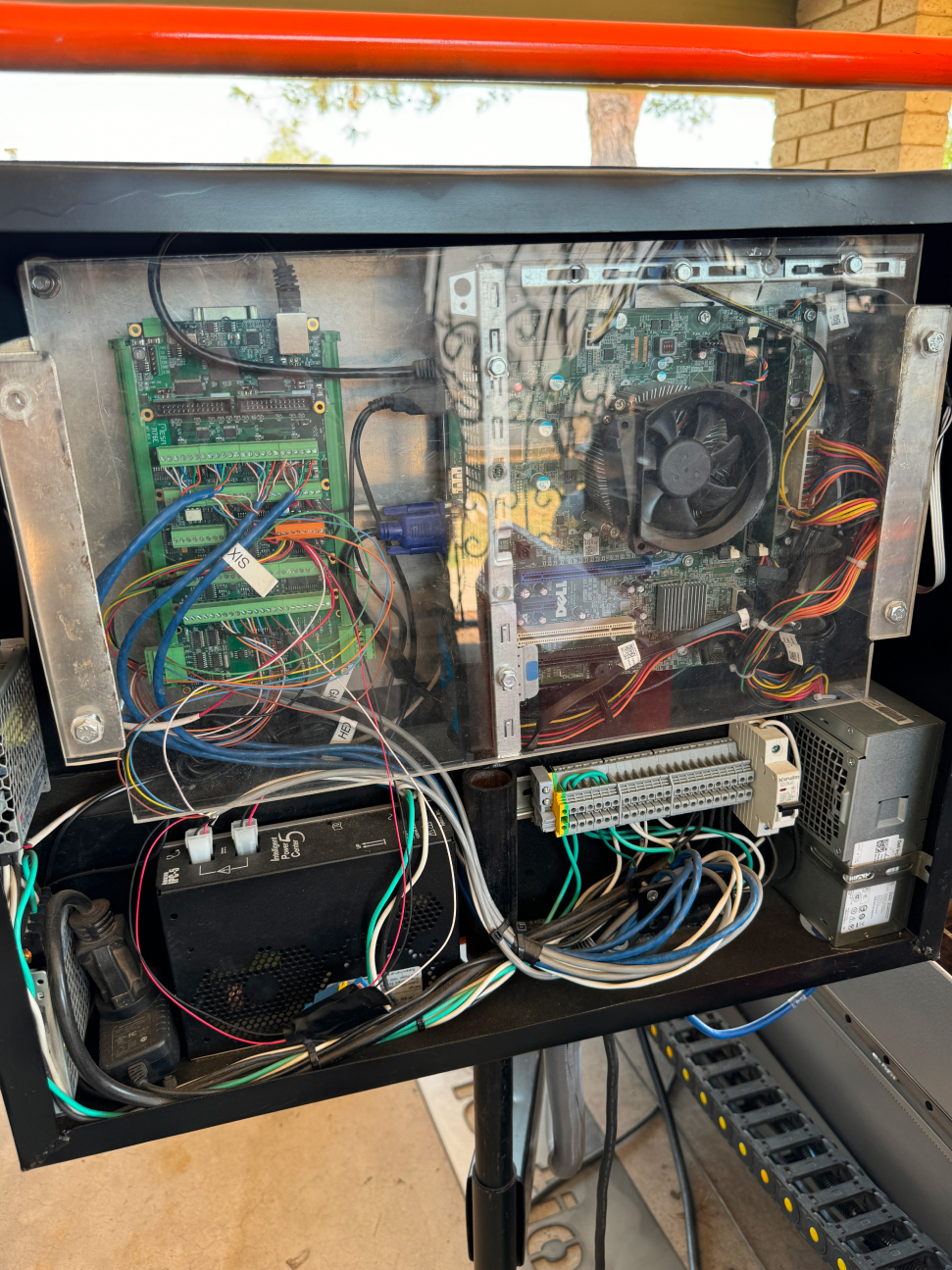
How to diagnose crashing LinuxCNC was created by HerrNamenlos123
How to diagnose crashing LinuxCNC
Category: Installing LinuxCNC
- ffffrf
- ffffrf
08 Jul 2024 19:32 - 08 Jul 2024 19:35
Replied by ffffrf on topic Controlling mains 0-9v sherline lathe spindle mesa 7i96s
Controlling mains 0-9v sherline lathe spindle mesa 7i96s
Category: Turning
- tommylight

08 Jul 2024 19:31
Replied by tommylight on topic Need a little help tweaking a HAL file
Need a little help tweaking a HAL file
Category: HAL
- phil-tronics
- phil-tronics
08 Jul 2024 18:55
Replied by phil-tronics on topic Mesa 5i25t, notes from basic stepper installation
Mesa 5i25t, notes from basic stepper installation
Category: PnCConf Wizard
- meister
- meister
08 Jul 2024 18:30
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
")
- papagno-source
- papagno-source
08 Jul 2024 18:28
Replied by papagno-source on topic Position vs Velocity mode
Position vs Velocity mode
Category: EtherCAT
- slowpoke
- slowpoke
08 Jul 2024 17:51 - 08 Jul 2024 17:54
Need a little help tweaking a HAL file was created by slowpoke
Need a little help tweaking a HAL file
Category: HAL
- viesturs.lacis
- viesturs.lacis
08 Jul 2024 17:37 - 08 Jul 2024 19:28
Replied by viesturs.lacis on topic BLDC component with 8i20 - how to get to work?
BLDC component with 8i20 - how to get to work?
Category: Driver Boards
- JT

08 Jul 2024 16:44 - 08 Jul 2024 20:51
Replied by JT on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
Time to create page: 0.767 seconds