Search Results (Searched for: )
- Catch22

08 Jul 2024 00:52

- Bari

08 Jul 2024 00:16
Replied by Bari on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
- Cant do this anymore bye all

08 Jul 2024 00:03 - 08 Jul 2024 00:18
Replied by Cant do this anymore bye all on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
- Cant do this anymore bye all
08 Jul 2024 00:01
Replied by Cant do this anymore bye all on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Cant do this anymore bye all
07 Jul 2024 23:47
Replied by Cant do this anymore bye all on topic Data transfer LinuxCNC to / from custom board - Solved
Data transfer LinuxCNC to / from custom board - Solved
Category: Advanced Configuration
- Grotius

07 Jul 2024 22:56
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- stustev
- stustev
07 Jul 2024 22:34
Replied by stustev on topic Pure Linear moves
Pure Linear moves
Category: General LinuxCNC Questions
- PCW

07 Jul 2024 21:39
Replied by PCW on topic Newb retrofit question
Newb retrofit question
Category: General LinuxCNC Questions
- tommylight

07 Jul 2024 20:58
Replied by tommylight on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
- Lcvette

07 Jul 2024 20:51
- Lcvette
07 Jul 2024 20:49
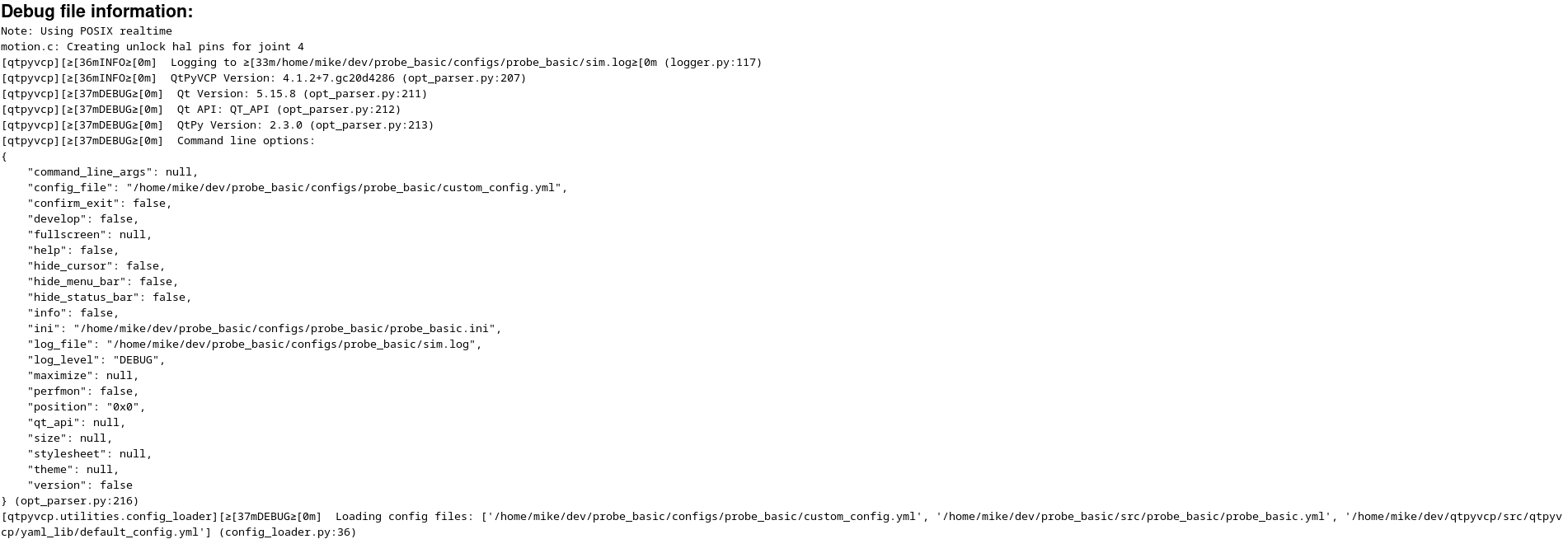
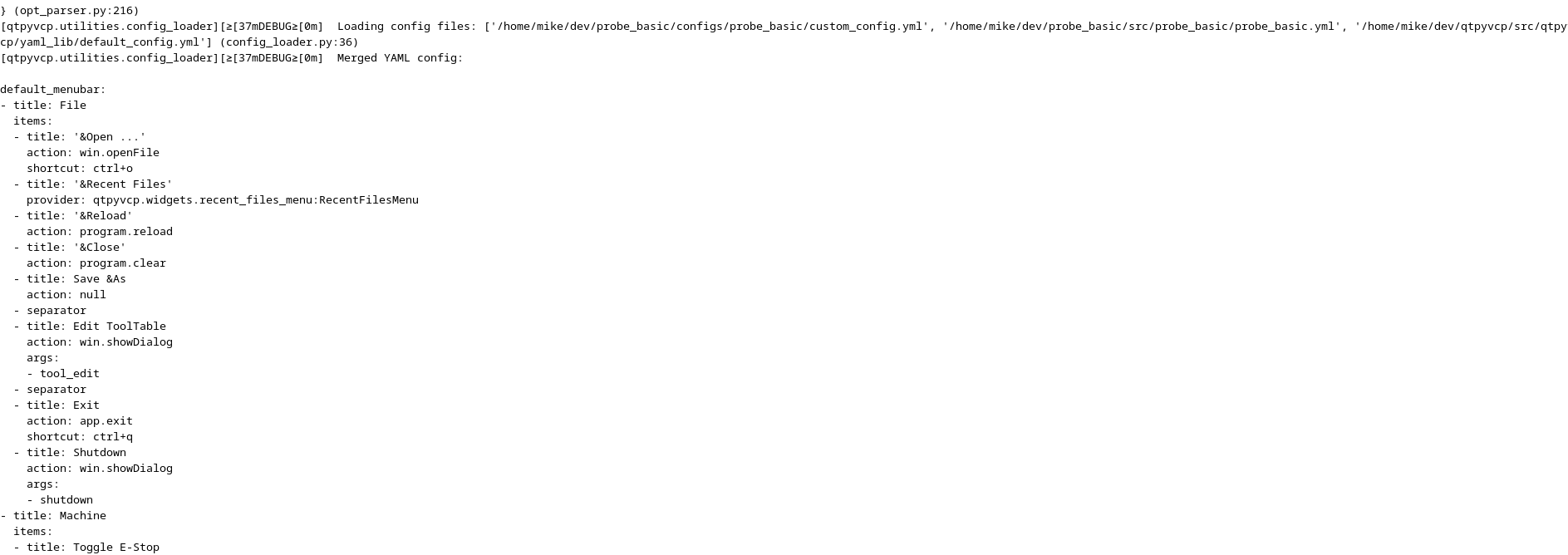
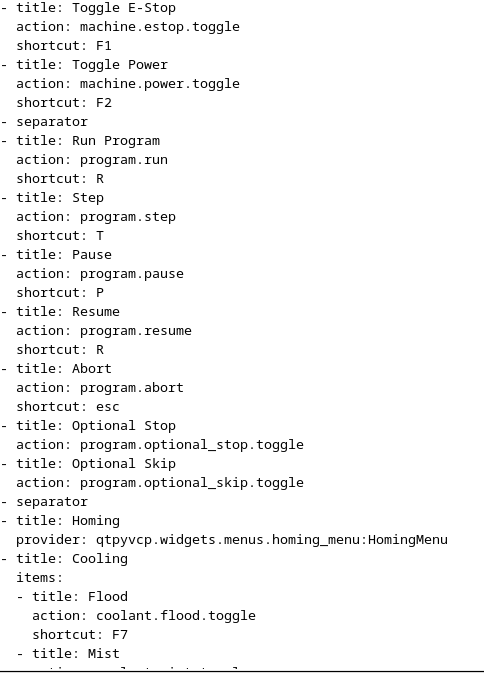
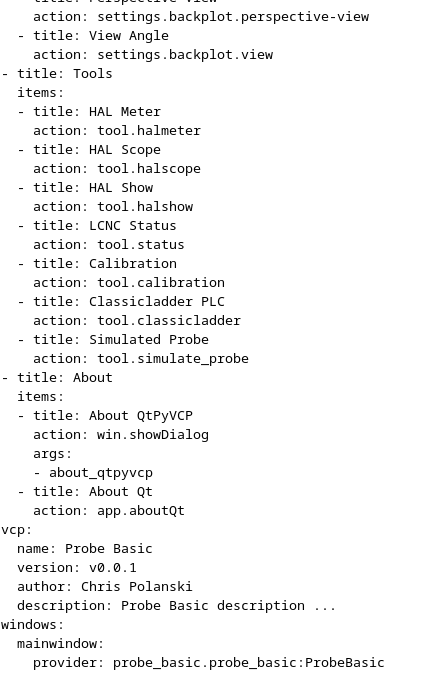
Replied by Lcvette on topic Py3 - Probe Basic Config Conversion Doc Lcnc 2.9+
Py3 - Probe Basic Config Conversion Doc Lcnc 2.9+
Category: QtPyVCP
- Bari
07 Jul 2024 20:34
- PCW
07 Jul 2024 20:28
- Aciera

07 Jul 2024 20:26
Replied by Aciera on topic Router Will not run
Router Will not run
Category: General LinuxCNC Questions
- slowpoke
- slowpoke
07 Jul 2024 20:26 - 07 Jul 2024 20:33
Replied by slowpoke on topic Data transfer LinuxCNC to / from custom board - Solved
Data transfer LinuxCNC to / from custom board - Solved
Category: Advanced Configuration
Time to create page: 0.606 seconds