Search Results (Searched for: )
- rodw

15 Jul 2026 11:11
Replied by rodw on topic Trixy Install problems
Trixy Install problems
Category: General LinuxCNC Questions
- rodw
15 Jul 2026 11:03
Replied by rodw on topic qtDragon: Auto Return to Manual Mode After an MDI Command so MPG works
qtDragon: Auto Return to Manual Mode After an MDI Command so MPG works
Category: Qtvcp
- Todd Zuercher

15 Jul 2026 09:52
Replied by Todd Zuercher on topic Is possible to use RS485 to read a CMOS laser sensor?
Is possible to use RS485 to read a CMOS laser sensor?
Category: Driver Boards
- meister
- meister
15 Jul 2026 08:50
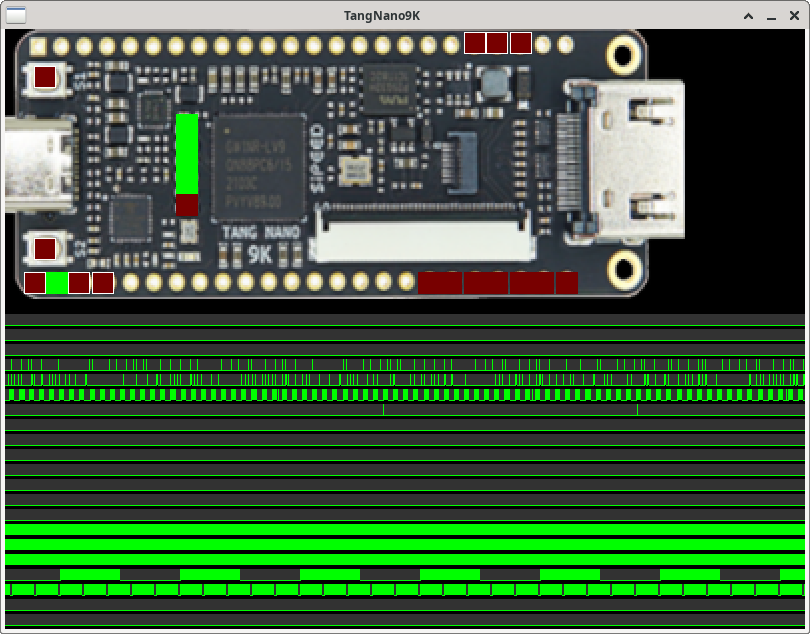
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
")
- aaron
- aaron
15 Jul 2026 08:03
Replied by aaron on topic Parallel port access is not allowed
Parallel port access is not allowed
Category: Installing LinuxCNC
- MaxEkb77

15 Jul 2026 07:59
Replied by MaxEkb77 on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT
- aaron
- aaron
15 Jul 2026 07:57
Getting Trixie to play nice was created by aaron
Getting Trixie to play nice
Category: General LinuxCNC Questions
- TripleM
- TripleM
15 Jul 2026 07:41
Replied by TripleM on topic Recommended way to implement spindle enable conditions?
Recommended way to implement spindle enable conditions?
Category: HAL
- aaron
- aaron
15 Jul 2026 07:31
Replied by aaron on topic Trixy Install problems
Trixy Install problems
Category: General LinuxCNC Questions
- BigDogCNC
- BigDogCNC
15 Jul 2026 07:16
- vermilion

15 Jul 2026 02:53
Is possible to use RS485 to read a CMOS laser sensor? was created by vermilion
Is possible to use RS485 to read a CMOS laser sensor?
Category: Driver Boards

- PCW

15 Jul 2026 00:20
- rhscdn
- rhscdn
14 Jul 2026 23:16
Replied by rhscdn on topic qtDragon: Auto Return to Manual Mode After an MDI Command so MPG works
qtDragon: Auto Return to Manual Mode After an MDI Command so MPG works
Category: Qtvcp
- Onkelmat

14 Jul 2026 22:19
- Odiug
- Odiug
14 Jul 2026 19:49
Replied by Odiug on topic qtDragon: Auto Return to Manual Mode After an MDI Command so MPG works
qtDragon: Auto Return to Manual Mode After an MDI Command so MPG works
Category: Qtvcp
Time to create page: 0.477 seconds