Search Results (Searched for: )
- grossm5000
- grossm5000
31 May 2026 22:10
Replied by grossm5000 on topic Differential encoder hard crashes the PC MESA7i77
Differential encoder hard crashes the PC MESA7i77
Category: Driver Boards
- PCW

31 May 2026 21:18
- grossm5000
- grossm5000
31 May 2026 19:59 - 31 May 2026 20:13
Replied by grossm5000 on topic Differential encoder hard crashes the PC MESA7i77
Differential encoder hard crashes the PC MESA7i77
Category: Driver Boards

- andrax

31 May 2026 19:42
Replied by andrax on topic LinuxCNC 2.9 / Debian 12 RT – EtherCAT Master Setup für 750W Servo gesucht
LinuxCNC 2.9 / Debian 12 RT – EtherCAT Master Setup für 750W Servo gesucht
Category: Deutsch
- Aciera

31 May 2026 19:40
Replied by Aciera on topic How to remove automatic g54 after M2/M30 ?
How to remove automatic g54 after M2/M30 ?
Category: General LinuxCNC Questions
- zz912

31 May 2026 19:28
Replied by zz912 on topic How to remove automatic g54 after M2/M30 ?
How to remove automatic g54 after M2/M30 ?
Category: General LinuxCNC Questions
- Aciera
31 May 2026 19:13 - 31 May 2026 19:16
Replied by Aciera on topic How to remove automatic g54 after M2/M30 ?
How to remove automatic g54 after M2/M30 ?
Category: General LinuxCNC Questions
- Lcvette

31 May 2026 19:02
Replied by Lcvette on topic Probe Basic Fusion360/FreeCAD manaual tool change workfolow?
Probe Basic Fusion360/FreeCAD manaual tool change workfolow?
Category: QtPyVCP
- grossm5000
- grossm5000
31 May 2026 19:01
Replied by grossm5000 on topic Differential encoder hard crashes the PC MESA7i77
Differential encoder hard crashes the PC MESA7i77
Category: Driver Boards
- zz912
31 May 2026 18:55
Replied by zz912 on topic How to remove automatic g54 after M2/M30 ?
How to remove automatic g54 after M2/M30 ?
Category: General LinuxCNC Questions
- grossm5000
- grossm5000
31 May 2026 18:33
Replied by grossm5000 on topic Differential encoder hard crashes the PC MESA7i77
Differential encoder hard crashes the PC MESA7i77
Category: Driver Boards
- Muecke

31 May 2026 18:16
") .
.- PedPEx
- PedPEx
31 May 2026 17:51 - 31 May 2026 18:04
Replied by PedPEx on topic LCEC creating Danfoss VFD config
LCEC creating Danfoss VFD config
Category: EtherCAT
- Aciera
31 May 2026 17:49 - 31 May 2026 19:31
Replied by Aciera on topic How to remove automatic g54 after M2/M30 ?
How to remove automatic g54 after M2/M30 ?
Category: General LinuxCNC Questions
- RMJ fabrication
- RMJ fabrication
31 May 2026 16:38
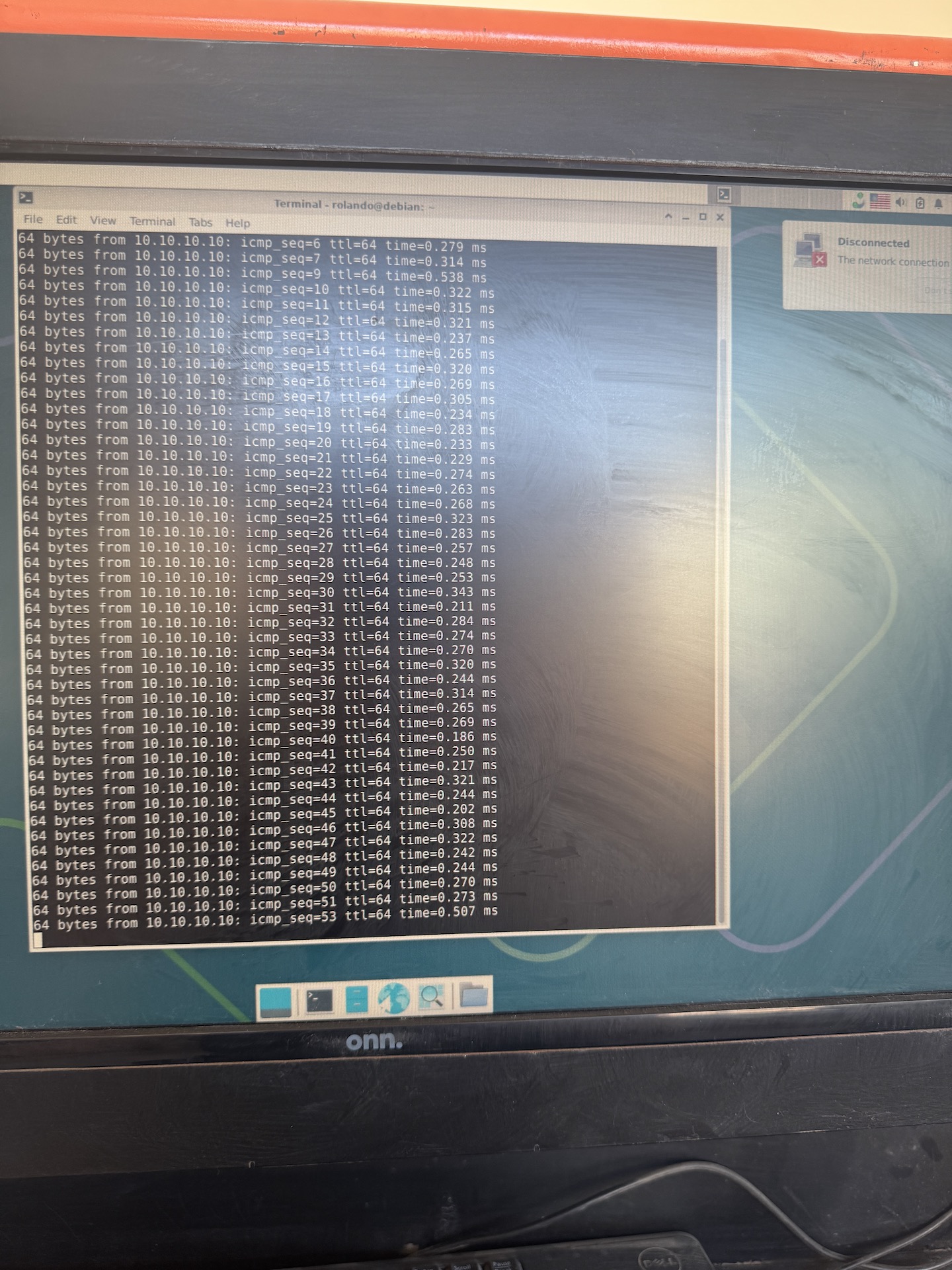
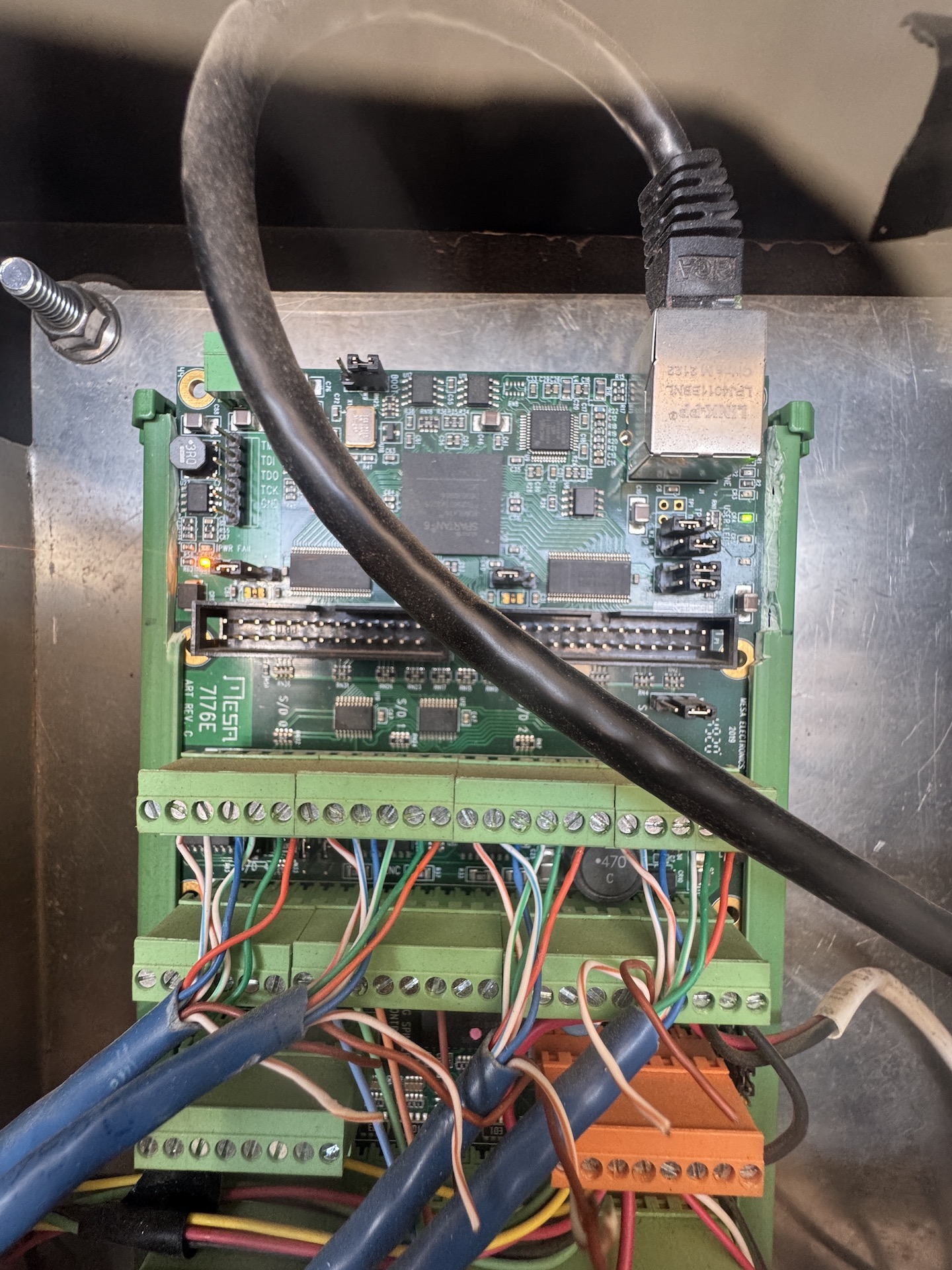
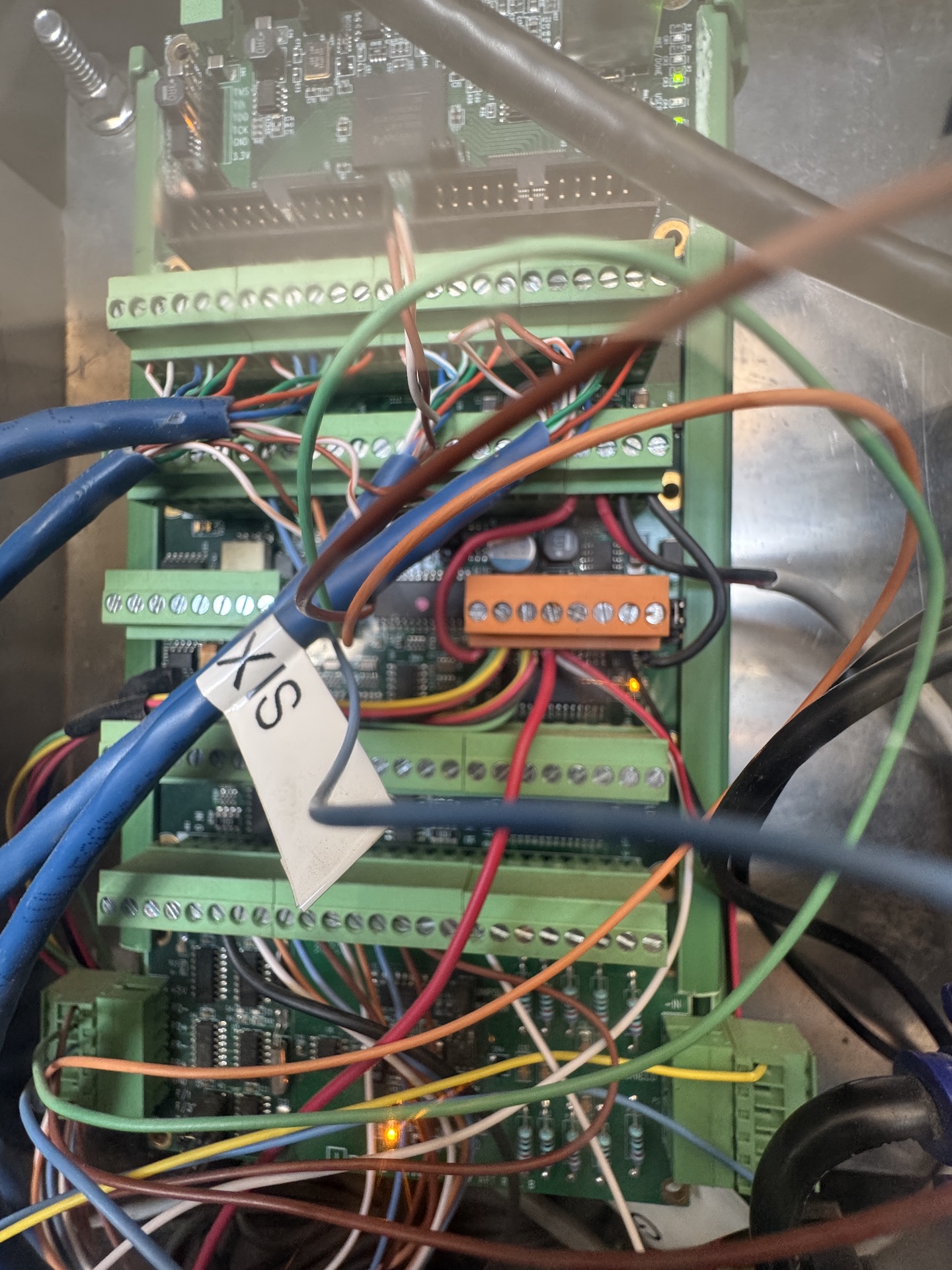
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac


Time to create page: 1.367 seconds