Search Results (Searched for: 7i76e)

Need help to wire and config Mesa 7i92TM
Category: Driver Boards
Do I have to set up the ethernet connection first following this guide?
forum.linuxcnc.org/27-driver-boards/3559...ethernet-mesa-boards

My Grizzly G0619 mill
Category: Show Your Stuff
One is for mainly inductive loads, fans, relays, ect.the other is for switches and such for the 7i76e .
If your referring to the 2 boards on the left side wall then they are break out boards for the 2 DB37 connectors that I
am using. One to the G0619 itself and the other to the Human Machine Interface / computer.
Step/Dir servos + Encoders = follow errors... and so much pain.....
Category: Advanced Configuration
Anyways, I did some searching and I am not sure clear instructions on how to use the stepgenindex to use index's for homing while still treating a the axis as open loop?
I imagine it would start with 2.9 and updating the VHD for the pinnouts in the firmware... Here is my current VHD for my 7i76e + 7i89 + generic Bob combo looks like
library IEEE;
use IEEE.std_logic_1164.all; -- defines std_logic types
use IEEE.STD_LOGIC_ARITH.ALL;
use IEEE.STD_LOGIC_UNSIGNED.ALL;
-- Copyright (C) 2007, Peter C. Wallace, Mesa Electronics
-- http://www.mesanet.com
--
-- This program is is licensed under a disjunctive dual license giving you
-- the choice of one of the two following sets of free software/open source
-- licensing terms:
--
-- * GNU General Public License (GPL), version 2.0 or later
-- * 3-clause BSD License
--
--
-- The GNU GPL License:
--
-- This program is free software; you can redistribute it and/or modify
-- it under the terms of the GNU General Public License as published by
-- the Free Software Foundation; either version 2 of the License, or
-- (at your option) any later version.
--
-- This program is distributed in the hope that it will be useful,
-- but WITHOUT ANY WARRANTY; without even the implied warranty of
-- MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
-- GNU General Public License for more details.
--
-- You should have received a copy of the GNU General Public License
-- along with this program; if not, write to the Free Software
-- Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
--
--
-- The 3-clause BSD License:
--
-- Redistribution and use in source and binary forms, with or without
-- modification, are permitted provided that the following conditions
-- are met:
--
-- * Redistributions of source code must retain the above copyright
-- notice, this list of conditions and the following disclaimer.
--
-- * Redistributions in binary form must reproduce the above
-- copyright notice, this list of conditions and the following
-- disclaimer in the documentation and/or other materials
-- provided with the distribution.
--
-- * Neither the name of Mesa Electronics nor the names of its
-- contributors may be used to endorse or promote products
-- derived from this software without specific prior written
-- permission.
--
--
-- Disclaimer:
--
-- THIS SOFTWARE IS PROVIDED BY THE COPYRIGHT HOLDERS AND CONTRIBUTORS
-- "AS IS" AND ANY EXPRESS OR IMPLIED WARRANTIES, INCLUDING, BUT NOT
-- LIMITED TO, THE IMPLIED WARRANTIES OF MERCHANTABILITY AND FITNESS
-- FOR A PARTICULAR PURPOSE ARE DISCLAIMED. IN NO EVENT SHALL THE
-- COPYRIGHT OWNER OR CONTRIBUTORS BE LIABLE FOR ANY DIRECT, INDIRECT,
-- INCIDENTAL, SPECIAL, EXEMPLARY, OR CONSEQUENTIAL DAMAGES (INCLUDING,
-- BUT NOT LIMITED TO, PROCUREMENT OF SUBSTITUTE GOODS OR SERVICES;
-- LOSS OF USE, DATA, OR PROFITS; OR BUSINESS INTERRUPTION) HOWEVER
-- CAUSED AND ON ANY THEORY OF LIABILITY, WHETHER IN CONTRACT, STRICT
-- LIABILITY, OR TORT (INCLUDING NEGLIGENCE OR OTHERWISE) ARISING IN
-- ANY WAY OUT OF THE USE OF THIS SOFTWARE, EVEN IF ADVISED OF THE
-- POSSIBILITY OF SUCH DAMAGE.
--
use work.IDROMConst.all;
package PIN_7i76x1_7i89x2D_x15ABOB_51 is
constant ModuleID : ModuleIDType :=(
(HM2DPLLTag, x"00", ClockLowTag, x"01", HM2DPLLBaseRateAddr&PadT, HM2DPLLNumRegs, x"00", HM2DPLLMPBitMask),
(WatchDogTag, x"00", ClockLowTag, x"01", WatchDogTimeAddr&PadT, WatchDogNumRegs, x"00", WatchDogMPBitMask),
(IOPortTag, x"00", ClockLowTag, x"03", PortAddr&PadT, IOPortNumRegs, x"00", IOPortMPBitMask),
(StepGenTag, x"02", ClockLowTag, x"06", StepGenRateAddr&PadT, StepGenNumRegs, x"00", StepGenMPBitMask),
(MuxedQcountTag, MQCRev, ClockLowTag, x"0A", MuxedQcounterAddr&PadT, MuxedQCounterNumRegs,x"00", MuxedQCounterMPBitMask),
(MuxedQCountSelTag, x"00", ClockLowTag, x"01", NullAddr&PadT, x"00", x"00", x"00000000"),
(SSerialTag, x"00", ClockLowTag, x"01", SSerialCommandAddr&PadT, SSerialNumRegs, x"10", SSerialMPBitMask),
(LEDTag, x"00", ClockLowTag, x"01", LEDAddr&PadT, LEDNumRegs, x"00", LEDMPBitMask),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000"),
(NullTag, x"00", NullTag, x"00", NullAddr&PadT, x"00", x"00", x"00000000")
);
constant PinDesc : PinDescType :=(
-- Base func sec unit sec func sec pin
IOPortTag & x"00" & StepGenTag & StepGenDirPin, -- I/O 00 embedded 7I76
IOPortTag & x"00" & StepGenTag & StepGenStepPin, -- I/O 01
IOPortTag & x"01" & StepGenTag & StepGenDirPin, -- I/O 02
IOPortTag & x"01" & StepGenTag & StepGenStepPin, -- I/O 03
IOPortTag & x"02" & StepGenTag & StepGenDirPin, -- I/O 04
IOPortTag & x"02" & StepGenTag & StepGenStepPin, -- I/O 05
IOPortTag & x"03" & StepGenTag & StepGenDirPin, -- I/O 06
IOPortTag & x"03" & StepGenTag & StepGenStepPin, -- I/O 07
IOPortTag & x"04" & StepGenTag & StepGenDirPin, -- I/O 08
IOPortTag & x"04" & StepGenTag & StepGenStepPin, -- I/O 09
IOPortTag & x"00" & SSerialTag & SSerialTX0Pin, -- I/O 10
IOPortTag & x"00" & SSerialTag & SSerialRX0Pin, -- I/O 11
IOPortTag & x"00" & SSerialTag & SSerialTX1Pin, -- I/O 12
IOPortTag & x"00" & SSerialTag & SSerialRX1Pin, -- I/O 13
IOPortTag & x"04" & MuxedQCountTag & MuxedQCountIDXPin, -- I/O 14
IOPortTag & x"04" & MuxedQCountTag & MuxedQCountQBPin, -- I/O 15
IOPortTag & x"04" & MuxedQCountTag & MuxedQCountQAPin, -- I/O 16
-- P1
-- 5ABOB pinout
-- 26 HDR -- IDC DB25
IOPortTag & x"05" & StepGenTag & StepGenStepPin, -- I/O 01 PIN 1 PIN 1 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 02 PIN 2 PIN 14 Spindle Step
IOPortTag & x"05" & StepGenTag & StepGenDirPin, -- I/O 03 PIN 3 PIN 2 Spindle Direction
IOPortTag & x"00" & NullTag & NullPin, -- I/O 04 PIN 4 PIN 15 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 05 PIN 5 PIN 3 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 06 PIN 6 PIN 16 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 07 PIN 7 PIN 4 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 08 PIN 8 PIN 17 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 09 PIN 9 PIN 5 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 10 PIN 11 PIN 6 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 11 PIN 13 PIN 7 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 12 PIN 15 PIN 8 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 13 PIN 17 PIN 9 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 14 PIN 19 PIN 10 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 15 PIN 21 PIN 11 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 16 PIN 23 PIN 12 just GPIO
IOPortTag & x"00" & NullTag & NullPin, -- I/O 33 PIN 25 PIN 13 just GPIO
-- P2 HDR26 DB25
IOPortTag & x"00" & MuxedQCountTag & MuxedQCountQAPin, -- I/O 17 PIN 1 PIN 1
IOPortTag & x"00" & MuxedQCountTag & MuxedQCountQBPin, -- I/O 18 PIN 14 PIN 2
IOPortTag & x"00" & MuxedQCountTag & MuxedQCountIDXPin, -- I/O 19 PIN 2 PIN 3
IOPortTag & x"01" & MuxedQCountTag & MuxedQCountQAPin, -- I/O 20 PIN 15 PIN 4
IOPortTag & x"01" & MuxedQCountTag & MuxedQCountQBPin, -- I/O 21 PIN 3 PIN 5
IOPortTag & x"01" & MuxedQCountTag & MuxedQCountIDXPin, -- I/O 22 PIN 16 PIN 6
IOPortTag & x"02" & MuxedQCountTag & MuxedQCountQAPin, -- I/O 23 PIN 4 PIN 7
IOPortTag & x"02" & MuxedQCountTag & MuxedQCountQBPin, -- I/O 24 PIN 17 PIN 8
IOPortTag & x"02" & MuxedQCountTag & MuxedQCountIDXPin, -- I/O 25 PIN 5 PIN 9
IOPortTag & x"03" & MuxedQCountTag & MuxedQCountQAPin, -- I/O 26 PIN 6 PIN 11
IOPortTag & x"03" & MuxedQCountTag & MuxedQCountQBPin, -- I/O 27 PIN 7 PIN 13
IOPortTag & x"03" & MuxedQCountTag & , -- I/O 28 PIN 8 PIN 15
IOPortTag & x"00" & MuxedQCountSelTag & MuxedQCountSel0Pin, -- I/O 29 PIN 9 PIN 17
IOPortTag & x"00" & NullTag & NullPin, -- I/O 30 PIN 10 PIN 19 powop
IOPortTag & x"00" & SSerialTag & SSerialRX2Pin, -- I/O 31 PIN 11 PIN 21
IOPortTag & x"00" & SSerialTag & SSerialTX2Pin, -- I/O 32 PIN 12 PIN 23
IOPortTag & x"00" & SSerialTag & SSerialTXEN2Pin, -- I/O 33 PIN 13 PIN 25
LIOPortTag & x"00" & SSerialTag & SSerialNTXEn1Pin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin, -- added for IDROM v3
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,
emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin,emptypin);
end package PIN_7i76x1_7i89x2D_x15ABOB_51;I am not sure if these updates got pushed into 2.8.3 or 2.8.4 and my github fu couldn't chase down the change set from back then to see if it is still in master or 2.9 or (again possible) pushed into 2.8.3 or .4..
Again sorry for resurrecting this, I am finally back in a place where I can bring this machine back to life..
What are the connectors on the MESA 7i76e called?
Category: Driver Boards
Vacuum gauge for a vacuum plate - any recommendations?
Category: CNC Machines
To run this thing, I am considering one of these sets:

The reason being:
- They are very cheap.
- I want to use the container as a vacuum buffer so that the pump doesn't have to run the whole time.
I am missing one piece of the puzzle though: A vacuum gauge that I can connect to my interface card (MESA 7i76e).
Any recommendations?

hostmot2 oneshot bitfile help
Category: Advanced Configuration
is in the source subdirectory of the 7I76E distribution zip file.
Here is the one changed file (other than files changed to add this to the sources)
that was used to build the 7I76E RCPWM firmware:
hostmot2 oneshot bitfile help
Category: Advanced Configuration
For example here is a 7I76E bitfile with 2 stepgens (0 and 1) and 6 RCPWMgens
(0 ..5) on the last three stepgen connectors of the 7I76E:
hostmot2 oneshot bitfile help
Category: Advanced Configuration
I just have the mesa card 7i76e+7i85s (from a different project) and a bunch of standard RC-Servos, featuring 3 leads, beenig GND, 5V and PWM-Signal.
At the moment I just don't understand, how to bring out the pwm-signal and on which pins. is a special bit-file needed?

[SOLVED] Rotary axis homin on index not working
Category: General LinuxCNC Questions
ini-section:
TYPE = ANGULAR
MAX_VELOCITY = 250.0
MAX_ACCELERATION = 1000.0
STEPGEN_MAXVEL = 300
STEPGEN_MAXACCEL = 1400
P = 50
I = 10
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 0.01
MAX_OUTPUT = 0
FERROR = 999
MIN_FERROR = 99
ENCODER_SCALE = 100
# these are in nanoseconds
DIRSETUP = 2500
DIRHOLD = 1000
STEPLEN = 1000
STEPSPACE = 1000
STEP_SCALE = 1000
HOME_SEARCH_VEL = 0
HOME_LATCH_VEL = 50
HOME_USE_INDEX = YES
HOME_SEQUENCE = 1
Hal-section
# --- PID SETUP ---
setp pid.a.Pgain [JOINT_3]P
setp pid.a.Igain [JOINT_3]I
setp pid.a.Dgain [JOINT_3]D
setp pid.a.bias [JOINT_3]BIAS
setp pid.a.FF0 [JOINT_3]FF0
setp pid.a.FF1 [JOINT_3]FF1
setp pid.a.FF2 [JOINT_3]FF2
setp pid.a.deadband [JOINT_3]DEADBAND
setp pid.a.maxoutput [JOINT_3]MAX_OUTPUT
setp pid.a.error-previous-target TRUE
setp pid.a.maxerror .01
# --- STEPGEN SETUP ---
setp hm2_7i76e.0.stepgen.04.dirsetup [JOINT_3]DIRSETUP
setp hm2_7i76e.0.stepgen.04.dirhold [JOINT_3]DIRHOLD
setp hm2_7i76e.0.stepgen.04.steplen [JOINT_3]STEPLEN
setp hm2_7i76e.0.stepgen.04.stepspace [JOINT_3]STEPSPACE
setp hm2_7i76e.0.stepgen.04.position-scale [JOINT_3]STEP_SCALE
setp hm2_7i76e.0.stepgen.04.step_type 0
setp hm2_7i76e.0.stepgen.04.control-type 1
setp hm2_7i76e.0.stepgen.04.maxaccel [JOINT_3]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.04.maxvel [JOINT_3]STEPGEN_MAXVEL
# --- ENCODER SETUP ---
setp hm2_7i76e.0.encoder.03.counter-mode 0
setp hm2_7i76e.0.encoder.03.filter 1
setp hm2_7i76e.0.encoder.03.index-invert 0
setp hm2_7i76e.0.encoder.03.index-mask 0
setp hm2_7i76e.0.encoder.03.index-mask-invert 0
setp hm2_7i76e.0.encoder.03.scale [JOINT_3]ENCODER_SCALE
# --- CLOSED LOOP STEPPER SIGNALS ---
net a-index-enable <=> pid.a.index-enable <=> joint.3.index-enable <=> hm2_7i76e.0.encoder.03.index-enable
net a-enable <= joint.3.amp-enable-out => pid.a.enable => hm2_7i76e.0.stepgen.04.enable
net a-pos-cmd <= joint.3.motor-pos-cmd => pid.a.command
net a-output <= pid.a.output => hm2_7i76e.0.stepgen.04.velocity-cmd
net a-pos-fb <= hm2_7i76e.0.encoder.03.position => pid.a.feedback => joint.3.motor-pos-fb
net a-vel-fb <= hm2_7i76e.0.encoder.03.velocity => pid.a.feedback-deriv
Thanks for the help.
hostmot2 oneshot bitfile help
Category: Advanced Configuration
would I need a special bit-file to set up a 6-axis-robot like the vismach/puma560 using RC-servos (rcpwmgen) and the mesa 7i76e together with the 7i85s (9x stegens and 5x encoder inputs in total)?
How can I create such a bit-file by myself? What would be a good starting point?
If I don't need one, how can I connect the three leads from the servos?
Cheers.
Martin.
Can the OPI5 be Configured to Run LCNC?
Category: Computers and OS's
My OPi5+ hasn't shipped out yet either, I ordered from the Ali store instead of Amazon. The usual delivery time from China is about 2-3 weeks to me on the West Coast of Canada. That being said my NanoPC-T6 from FriendlyELEC is here already, it only took about 10 days to arrive via DHL.
The post you made about xunlong kernal changes is way over my head at this point. I bought both of these SBC boards in hopes someone smarter than myself would get one an I could just follow along, you are one of the people. Thank You.
I can always use the second board for one of my many other projects that doesn't need the real-time magic. I also have 2x brand new never opened MESA 7i76e cards I bought when there was supply chain shortages. I was planning on using but will most likely never even touch them now that I picked up some LEADSHINE EL8 EtherCat drives and ELM2 motors ($ not cheap $). Each drive has its own i/o pins for limits, estop, probe, glass slides, etc. and if the OPi5+ 40-pin GPIOs are accessible than I don't see a use for the mesa cards anymore. I guess maybe I should sell them.
I guess I will need a M.2 SSD as there is no eMMC like the NanoPC-T6 has, Also I assume a heatsink will be required, is there recommended one that will work with this board?
[SOLVED] Rotary axis homin on index not working
Category: General LinuxCNC Questions
On my 7i76e i use three stepgens using closed loop with index homing (stepper/glasscales), one stepgen with home switch and the one in question with a step/dir servo controller with index homing from the controller index feedback. Would that work?The stepgen index
input is normally shared with encoder index inputs of the same channel
so you might have to re-arrange stepgens for this to work.
Hm, if I do that I always get an 'offset' in the DRO after homing. The absolute value in the DRO is not 0 but say 1.5. This value decreases with the homing latch velocity but i'm already crawling.I set the linuxcnc PID to 1 and tune the servo controller. It works...
[solved] Rehoming Lathespidle / Rotary-Axis from inside GCode
Category: Advanced Configuration
The problem is this:
Running the motor in speed mode for lathe operations disables the encoder feedback from the servo controller and the angular position information for the rotary axis in linuxCNC is out of sync. So switching the servo controller back to position mode leaves me with a randomly positioned rotary axis that needs to be rehomed before continuing with a GCode milling operation.
I have the index signal available for homing but how do I reset the absolute position of the rotary joint from inside Gcode?
[SOLVED] Rotary axis homin on index not working
Category: General LinuxCNC Questions
net a-pos-fb <= hm2_7i76e.0.encoder.03.position
[SOLVED] Rotary axis homin on index not working
Category: General LinuxCNC Questions
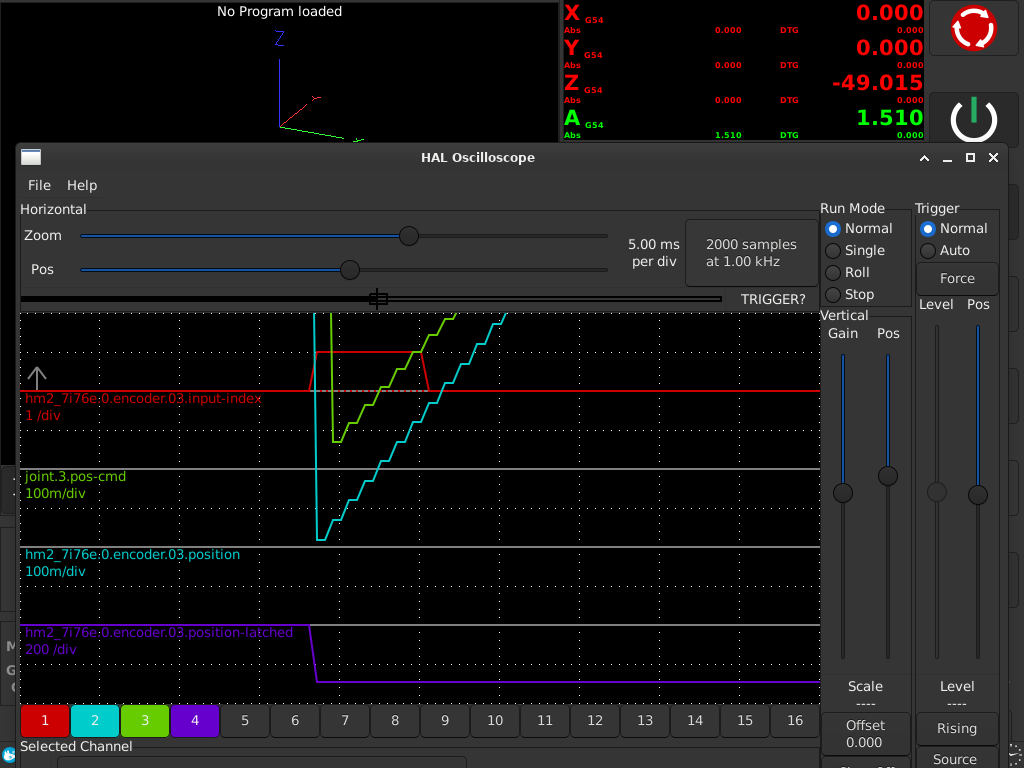
I would expect the motor to rotate (according to the 'HOME_LATCH_VEL' set in the ini and upon finding the index pulse stop and reset the absolute position to zero.
What I see is the motor starts turning finds the index and then returns to, what seems to me, the old absolute zero position.
This is on Version 2.9 from a recent bookworm install.
Any ideas?

TYPE = ANGULAR
MAX_VELOCITY = 240.0
MAX_ACCELERATION = 800.0
STEPGEN_MAXVEL = 300
STEPGEN_MAXACCEL = 1000
P = 1000
I = 0
D = 0
FF0 = 0
FF1 = 1
FF2 = 0
BIAS = 0
DEADBAND = 1
MAX_OUTPUT = 0
ENCODER_SCALE = 100
# these are in nanoseconds
DIRSETUP = 2500
DIRHOLD = 1000
STEPLEN = 1000
STEPSPACE = 1000
STEP_SCALE = 1000
HOME_SEARCH_VEL = 0
HOME_LATCH_VEL = 40
HOME_USE_INDEX = YES
HOME_SEQUENCE = 1
# --- PID SETUP ---
setp pid.a.Pgain [JOINT_3]P
setp pid.a.Igain [JOINT_3]I
setp pid.a.Dgain [JOINT_3]D
setp pid.a.bias [JOINT_3]BIAS
setp pid.a.FF0 [JOINT_3]FF0
setp pid.a.FF1 [JOINT_3]FF1
setp pid.a.FF2 [JOINT_3]FF2
setp pid.a.deadband [JOINT_3]DEADBAND
setp pid.a.maxoutput [JOINT_3]MAX_OUTPUT
setp pid.a.error-previous-target TRUE
setp pid.a.maxerror .01
# --- STEPGEN SETUP ---
setp hm2_7i76e.0.stepgen.04.dirsetup [JOINT_3]DIRSETUP
setp hm2_7i76e.0.stepgen.04.dirhold [JOINT_3]DIRHOLD
setp hm2_7i76e.0.stepgen.04.steplen [JOINT_3]STEPLEN
setp hm2_7i76e.0.stepgen.04.stepspace [JOINT_3]STEPSPACE
setp hm2_7i76e.0.stepgen.04.position-scale [JOINT_3]STEP_SCALE
setp hm2_7i76e.0.stepgen.04.step_type 0
setp hm2_7i76e.0.stepgen.04.control-type 1
setp hm2_7i76e.0.stepgen.04.maxaccel [JOINT_3]STEPGEN_MAXACCEL
setp hm2_7i76e.0.stepgen.04.maxvel [JOINT_3]STEPGEN_MAXVEL
# --- ENCODER SETUP ---
setp hm2_7i76e.0.encoder.03.counter-mode 0
setp hm2_7i76e.0.encoder.03.filter 1
setp hm2_7i76e.0.encoder.03.index-invert 0
setp hm2_7i76e.0.encoder.03.index-mask 0
setp hm2_7i76e.0.encoder.03.index-mask-invert 0
setp hm2_7i76e.0.encoder.03.scale [JOINT_3]ENCODER_SCALE
#--- OPEN LOOP STEPPER SIGNALS ---
net a-index-enable <=> joint.3.index-enable <=> pid.a.index-enable <=> hm2_7i76e.0.encoder.03.index-enable
net a-enable <= joint.3.amp-enable-out => pid.a.enable => hm2_7i76e.0.stepgen.04.enable
net a-pos-cmd <= joint.3.motor-pos-cmd => pid.a.command
net a-vel-cmd <= joint.3.vel-cmd => pid.a.command-deriv
net a-output <= pid.a.output => hm2_7i76e.0.stepgen.04.velocity-cmd
net a-pos-fb <= hm2_7i76e.0.stepgen.04.position-fb => pid.a.feedback => joint.3.motor-pos-fb