- Configuring LinuxCNC
- Advanced Configuration
- Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
- jochen91
- Offline
- Senior Member
-

- Posts: 65
- Thank you received: 20

Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

- Posts: 4754
- Thank you received: 2134
I would start out with an unmodified 'xyzcb_tdr_kins.comp' and do the modifications in small steps while frequently 'halcompiling' the file to find out when it breaks.
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4754
- Thank you received: 2134
res += hal_pin_float_newf(HAL_IN ,&haldata->angleXX ,comp_id,"%s.angleXX" ,HAL_PREFIX);Please Log in or Create an account to join the conversation.
- jochen91
- Offline
- Senior Member
-
- Posts: 65
- Thank you received: 20
yeah that was basically the problem. I could figure it out with your suggestion with the frequent halcompile way, but this was the culprit. Now it works and i started working on vismach.
I figured out how vismach works and started to modify an existing configuration. But in general its a bit of a pain.
I wonder if its possible to give feedback to the dev-Team in terms of new ideas?
I think it could be done easier, more comfortable and more accurate if it would be possible to export the already animated and set up machine out of Freecad and then just implement it into LCNC. Which would result in a proper machine simulation just as the big boys do it (siemens/fanuc etc.)
It is nice to import .obj and .stl but fitting them together is somehow a bit painful.
Even the documentation has a nice little note:
part = Capture() I have no idea what this does ! But it seems to be important for tool tip visualization…But anyway, thank you so far for the great support!
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4754
- Thank you received: 2134
If you have the knowledge to prepare a pull request for what you have in mind then I'm sure there would be a fair bit of interest but if you hope for somebody else to do the programming then the chances are fairly slim.
Please Log in or Create an account to join the conversation.
- jochen91
- Offline
- Senior Member
-
- Posts: 65
- Thank you received: 20
") By trade I'm a power electronics engineer... so my programming skills are... well they can only be improved
By trade I'm a power electronics engineer... so my programming skills are... well they can only be improved Please Log in or Create an account to join the conversation.
- jochen91
- Offline
- Senior Member
-
- Posts: 65
- Thank you received: 20
(Forward Non TCP)
pos->tran.x = j[0] + j[1] * cos(angle);
pos->tran.y = - j[1] * sin(angle);(Inverted Non TCP)
j[0] = pos->tran.x + pos->tran.y / tan(angle);
j[1] = - pos->tran.y / sin(angle);Note:
X on the Mazak is head up and down in
Z on the Mazak is table left and right
But shouldn't it change? Why doesn't it ?
Kind regards,
Jochen
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4754
- Thank you received: 2134
Also note that the forward kinematic is only used to calculate the axis values from the joint home position right after homing and probably when switching kinematics. After that only the inverse kinematic model is used to calculate the joint positions for given axis values.
Please Log in or Create an account to join the conversation.
- jochen91
- Offline
- Senior Member
-
- Posts: 65
- Thank you received: 20
thank for the input. Today I started to configure vismach, when i realized that my TCP moves seem off by quite a bit. Which leads me to the following questions:
With the Mazak Z axis is lying horizontal and X standing vertically. -> So i switched X and Z in my vismach model and everything's fine. But in TCP i realized that if i switch between normal and TCP my Z axis was moving left and right. Which had to do with the X/Y offsets for TCP. Witch made me lead to the conclusion, that in the TCP calculation the tool-offset need to be applied to X and not Z. Which than begs the question if the formulas for X and Z need to be switched completely.
So i started doubting everything and searched the forum. I found your XYZBC-TNR example which sadly i can't run right now because of some permission problems:
:0: execv(./vismach/xyzbc-tnr-gui.py): Permission deniedBut I'm still not quite sold if i can copy the the TCP math from this example. With the Mazak the head is swiveling around Y (B-axis) in your example it's a dual table config.
I would be real glad if you could give me some input on:
- 5 - axis Kinematic with swiveling B axis head
- The X and Z axis switch debacle
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4754
- Thank you received: 2134
github.com/Sigma1912/LinuxCNC_Demo_Configs/tree/main
to test this you need to:
1. download and unpack the folder 'LinuxCNC_Demo_Configs-main'
2. from the unpacked folder copy the folder '5axis-twp' and paste it into your 'configs/sim' folder
3. right click->Properties->mark as executable the following files (otherwise you get the permission error you got):
- '5axis-twp/twp-helper-comp.py'
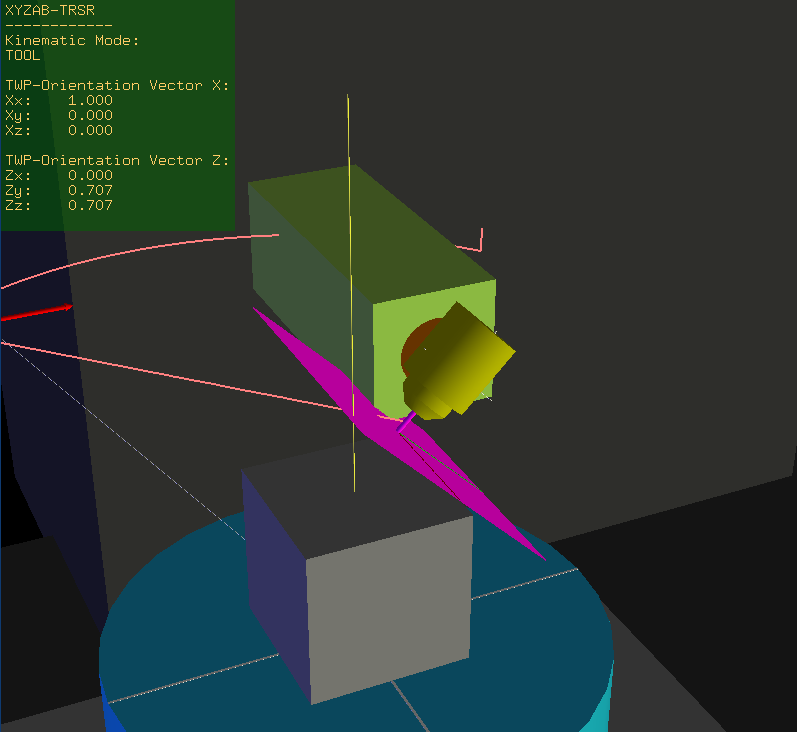
- '5axis-twp/vismach/xyzbc-trsr-gui.py'
Attachments:
Please Log in or Create an account to join the conversation.
- Configuring LinuxCNC
- Advanced Configuration
- Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine