- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
- digiex_chris
- Offline
- Senior Member
-

- Posts: 40
- Thank you received: 11
That reminds me, is there a way to configure minimum delay time between a DIR change and a movement command? some steppers are more picky about that. I also need to flip the action of the EN pin, my steppers are enable-low and it's currently outputting high when enabled.
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-

- Posts: 133
- Thank you received: 15
What kind of set up do you have? Do you have Stepper Motors with Feedback, without feedback or Servo Motors?I played with PID myself some, and moving away from P250 I0 D0 just made things worse for me, the deadband was what I needed, but I was also hunting for a 4rth digit of following accuracy. Glad things are working better!
I am running Steppers without Feedback. I wonder how the PID works in that case. If you don't have feedback, how can the PID work. My theory, the Position is commanded and the Steppgenerator reports the "theoretical" position back. Not knowing it the motor made the step or not.
When I played around with it, I lowered the values quite a bit and got a following error. Seems like to confirm my theory above. I did not notice a change from the default PID P 300 to like 30, but the following error came with P 5 or less.
I was hoping that the way my motors stall would be an overrun of the P Max value, but increasing that did not help either. I have to do more testing. It still might not be a problem of RIO, since my other motors are running just fine.
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-
- Posts: 133
- Thank you received: 15
I changed motors, drives, wires and pins and the stalling still happens. Then I thought measuring Direction and Step at the same time. And I believe I found the error. I measured the output of the Tang which is almost perfect. A tiny bit of noise, but really not a lot. When I measure Step and Dir at the drives Dir has a lot noise! See pictures below. I have the step and dir per motor in a single 2 conductor cable. I changed that and put the 2x dir in one cable and the left the step each in a separate cable. No change. I think I have so much noise that the driver probably thinks to change direction.
Anyone an idea how to reduce the noise? Channel B (red) is direction.
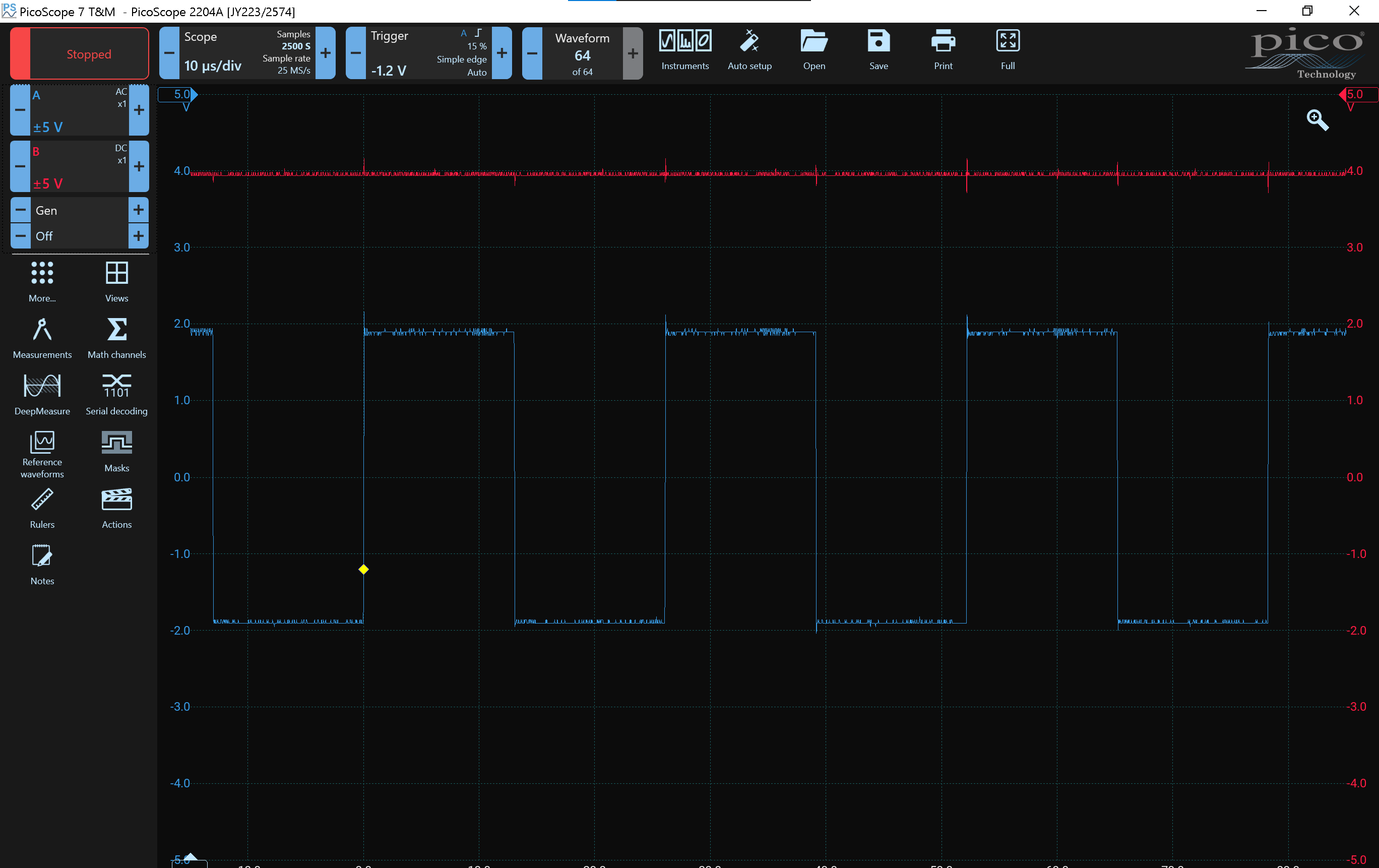

Attachments:
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-

- Posts: 447
- Thank you received: 228
Pardon my disappearance from my last updates, had to swing cross border to deal with pressing family issues (nothing health or negative related, only good stuff). The better news is when I came back I immediately rushed to the garage to see my gears and V O I L A , the RIO kit was shinning a led haha.
Everything werks spins moves scream slice chew cut chips its amazing to be back, it's just all full of f n dust everywhere though HELP lol
Thought to stop by and say Hello! Peace All ✌
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
- Posts: 447
- Thank you received: 228
Link up, Oliver. If you think I've missed anything important since 90 days shoot me in the correct direction please, I'll have spare time during the weekend to spy on The Best Cult around!
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
- Posts: 747
- Thank you received: 473
")
there are two new cool boards:
github.com/digiexchris/rio-solidwater-shield
github.com/festlv/rioctrl-hw
and little bugfixes in the software
@all
gitano from the german forum 'https://www.cnc-aus-holz.at'has put together a cool logo

what do you think of it ?
Attachments:
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
- Posts: 447
- Thank you received: 228
Always good to keep updated and in the loop anyway, so I'll do that. You sound good man, good vibes, Keep it up!
Gitano's creativity is great. Doesn't look Cult'ish enough though, he needs a tattoo + blink one of his eye and it's sorted
")
Please Log in or Create an account to join the conversation.
- mBender
- Offline
- Premium Member
-
- Posts: 133
- Thank you received: 15
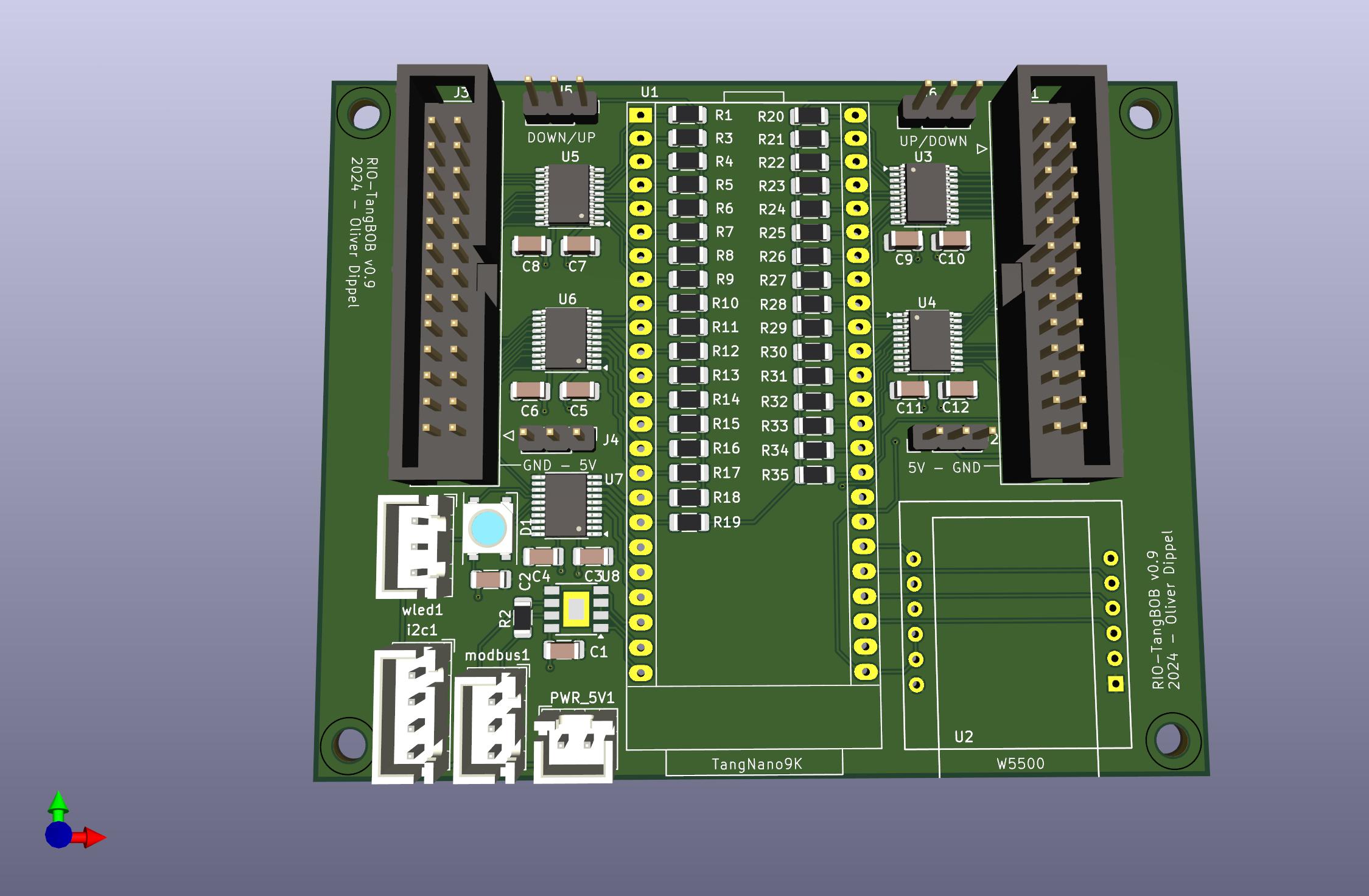
I am convinced it has nothing to do with the Rio software. But the tang vs parallel port makes the difference. The signal after the BOB comes out with less noise when I run it from the parallel port as when I have the tang connected. I don't know why and I don't know why my DM332T don't make an issue either way, but the Microkinetics does.
I will order a new drive, but that opens up a new can of worms and I may upgrade directly to servo drives...
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
- Posts: 447
- Thank you received: 228
Without that I highly doubt anyone (here at least) will be able to remotely assist. Although the noise issue you seem to be having has nothing to do with RIO let alone Linux CNC.
Ruling out RIO and Lcnc is easy, outputs can easily be probed while running a simple gcode program.
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
- Posts: 447
- Thank you received: 228
So damn simple, and simplicity RULES. Not much can go wrong here.
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)