Search Results (Searched for: raspberry)
- daveyr
- daveyr
05 Nov 2024 12:25
Replied by daveyr on topic Error getting packages on fresh install on Raspberry Pi 5
Error getting packages on fresh install on Raspberry Pi 5
Category: QtPyVCP
- Cant do this anymore bye all

05 Nov 2024 11:59
Replied by Cant do this anymore bye all on topic Error getting packages on fresh install on Raspberry Pi 5
Error getting packages on fresh install on Raspberry Pi 5
Category: QtPyVCP
- daveyr
- daveyr
05 Nov 2024 10:27
Error getting packages on fresh install on Raspberry Pi 5 was created by daveyr
Error getting packages on fresh install on Raspberry Pi 5
Category: QtPyVCP
- scotta

04 Nov 2024 19:59
- digiex_chris
- digiex_chris
04 Nov 2024 19:32
Replied by digiex_chris on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware


- Bari

04 Nov 2024 01:09
- Bari
04 Nov 2024 00:58
- PCW

01 Nov 2024 19:51 - 01 Nov 2024 19:52
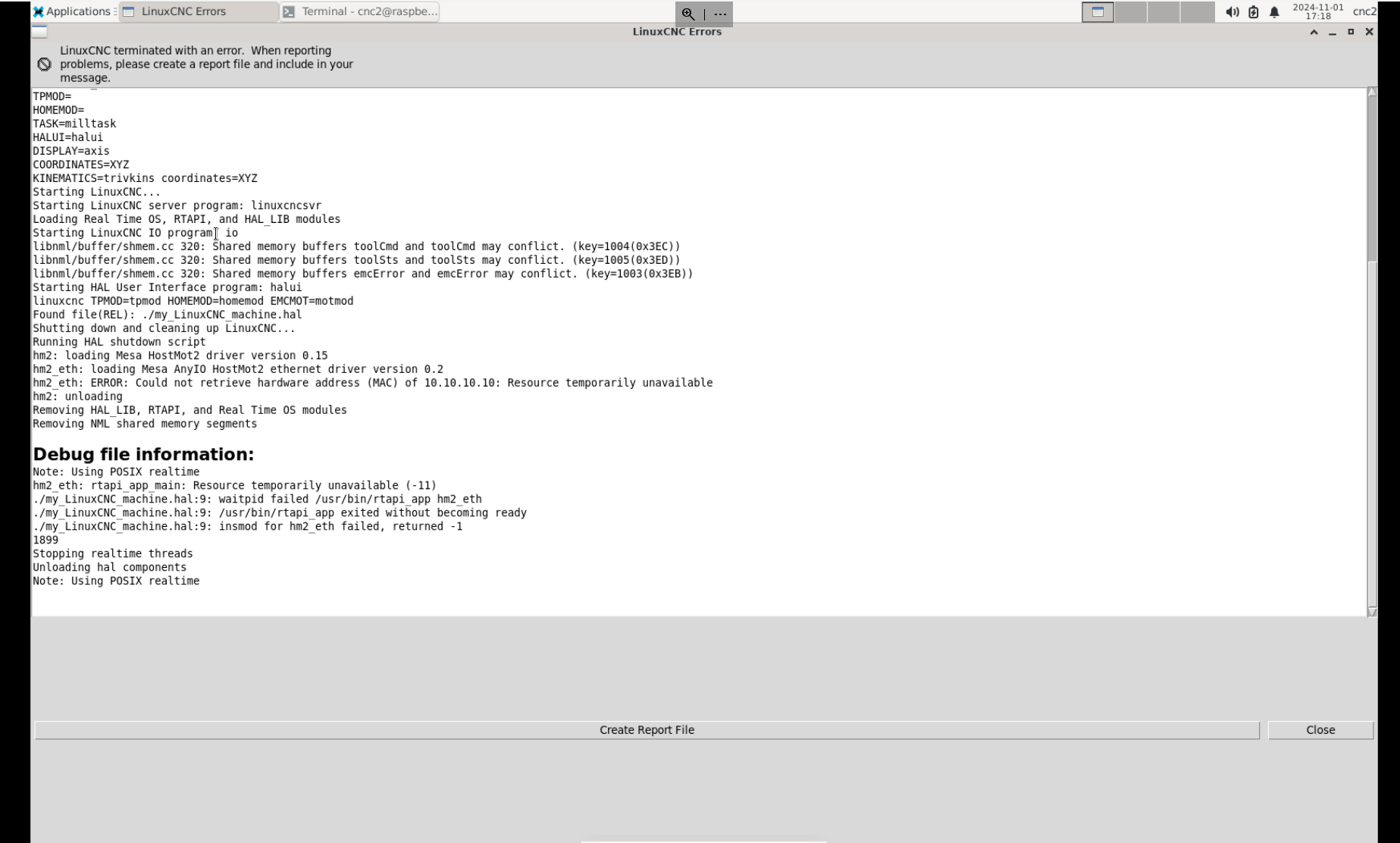
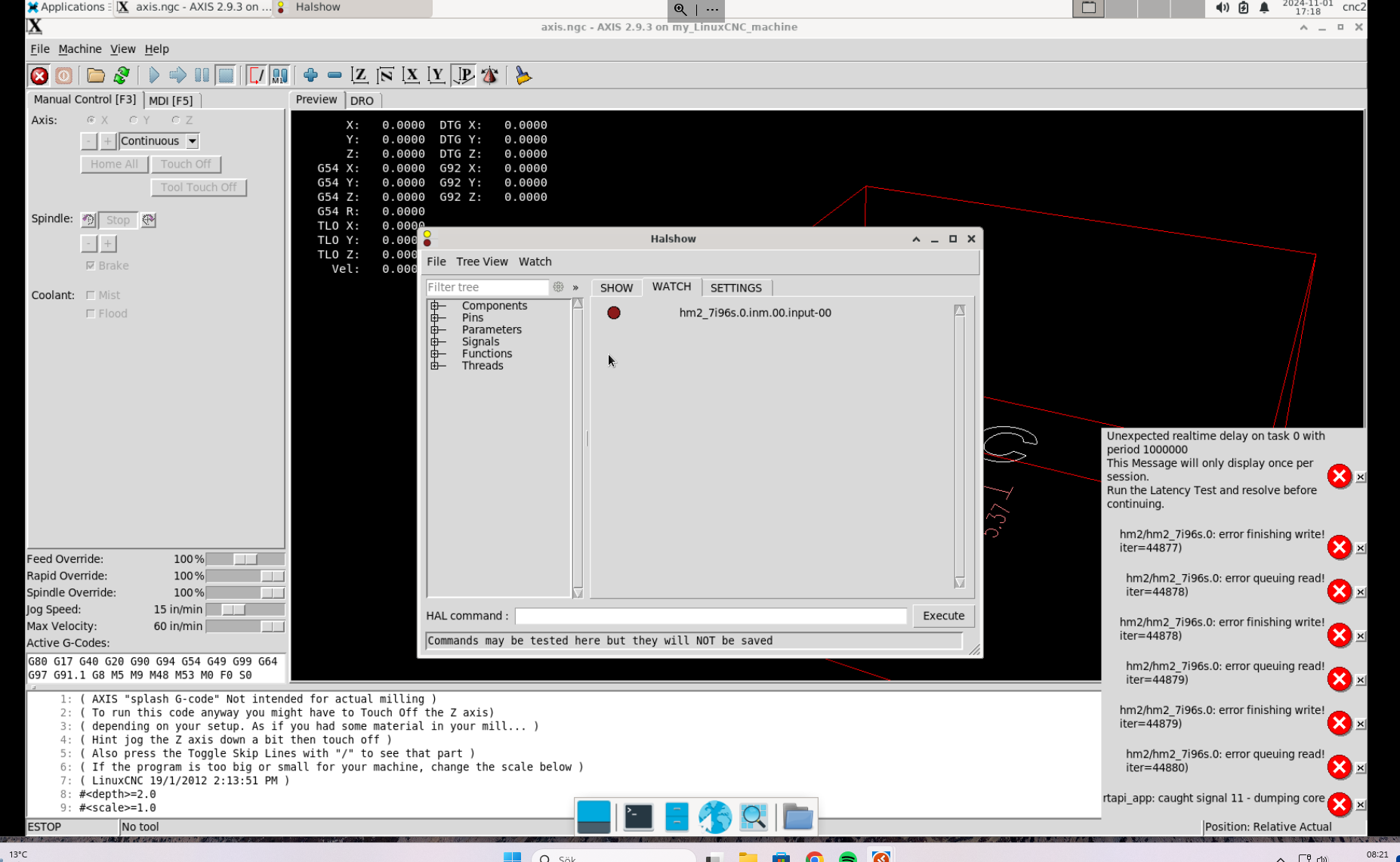
Replied by PCW on topic Raspberry pi 4 problems
Raspberry pi 4 problems
Category: General LinuxCNC Questions
- Philip Lydin
- Philip Lydin
01 Nov 2024 07:26 - 01 Nov 2024 07:29
Raspberry pi 4 problems was created by Philip Lydin
Raspberry pi 4 problems
Category: General LinuxCNC Questions
- Cant do this anymore bye all
30 Oct 2024 00:09
Replied by Cant do this anymore bye all on topic Installing LinuxCNC 2.9 on Raspberry Pi 4B with Preempt-RT kernel
Installing LinuxCNC 2.9 on Raspberry Pi 4B with Preempt-RT kernel
Category: Installing LinuxCNC
- DSS

29 Oct 2024 18:52 - 29 Oct 2024 18:56
Replied by DSS on topic For Sale Mesa 7i92 + MX4660 & Mesa 7C80 + RPI 4
For Sale Mesa 7i92 + MX4660 & Mesa 7C80 + RPI 4
Category: User Exchange

Time to create page: 0.817 seconds