Search Results (Searched for: )
- CarterKraft
- CarterKraft
07 May 2025 16:42
Replied by CarterKraft on topic Black Friday Deal got me :)
Black Friday Deal got me :)
Category: Plasma & Laser
- Aciera

07 May 2025 15:27 - 07 May 2025 16:05
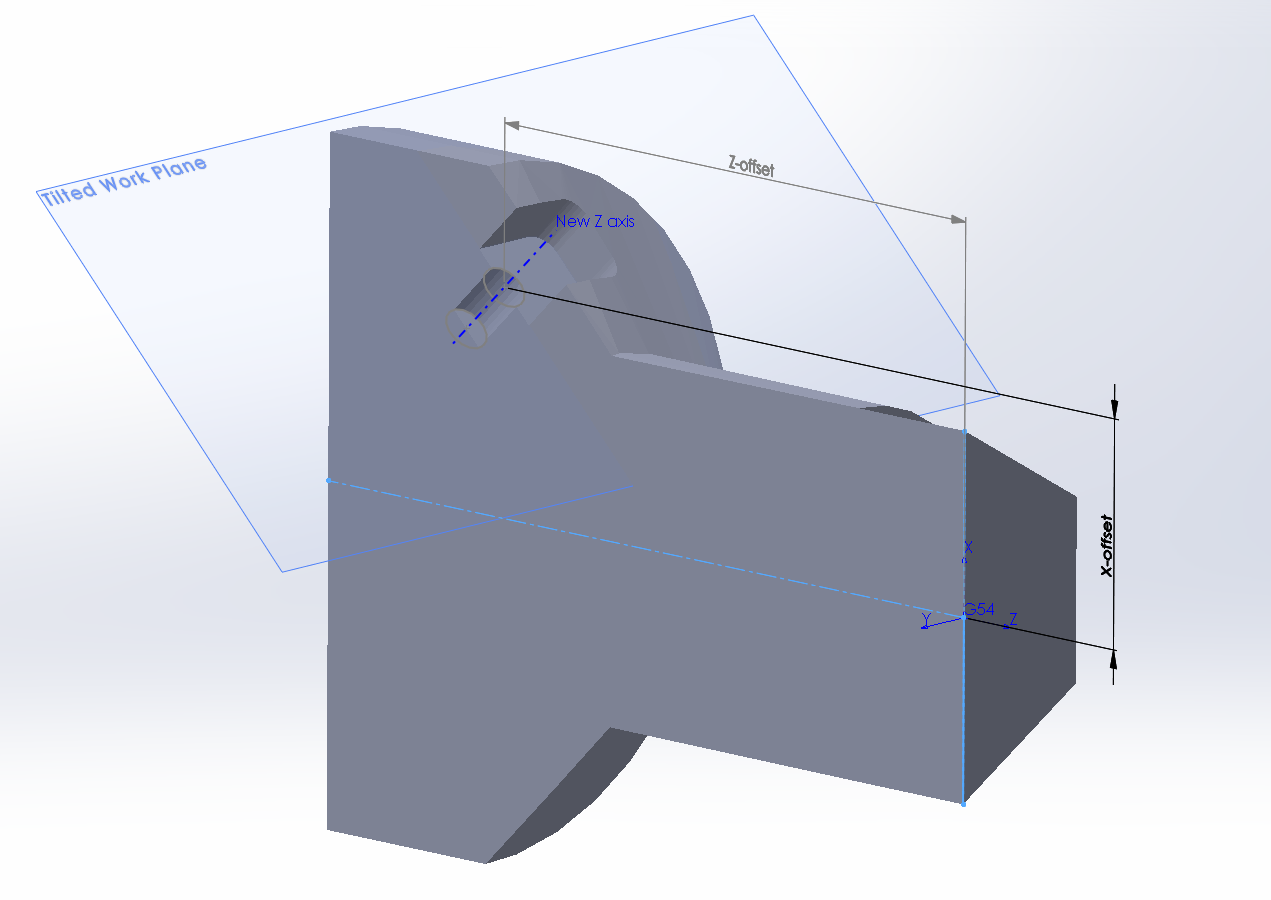
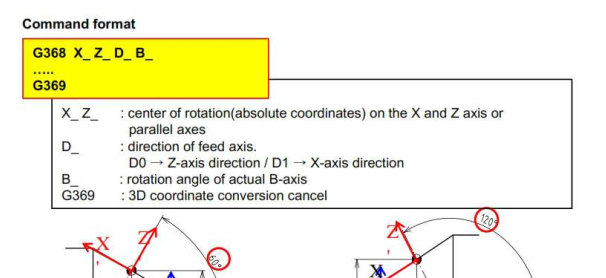
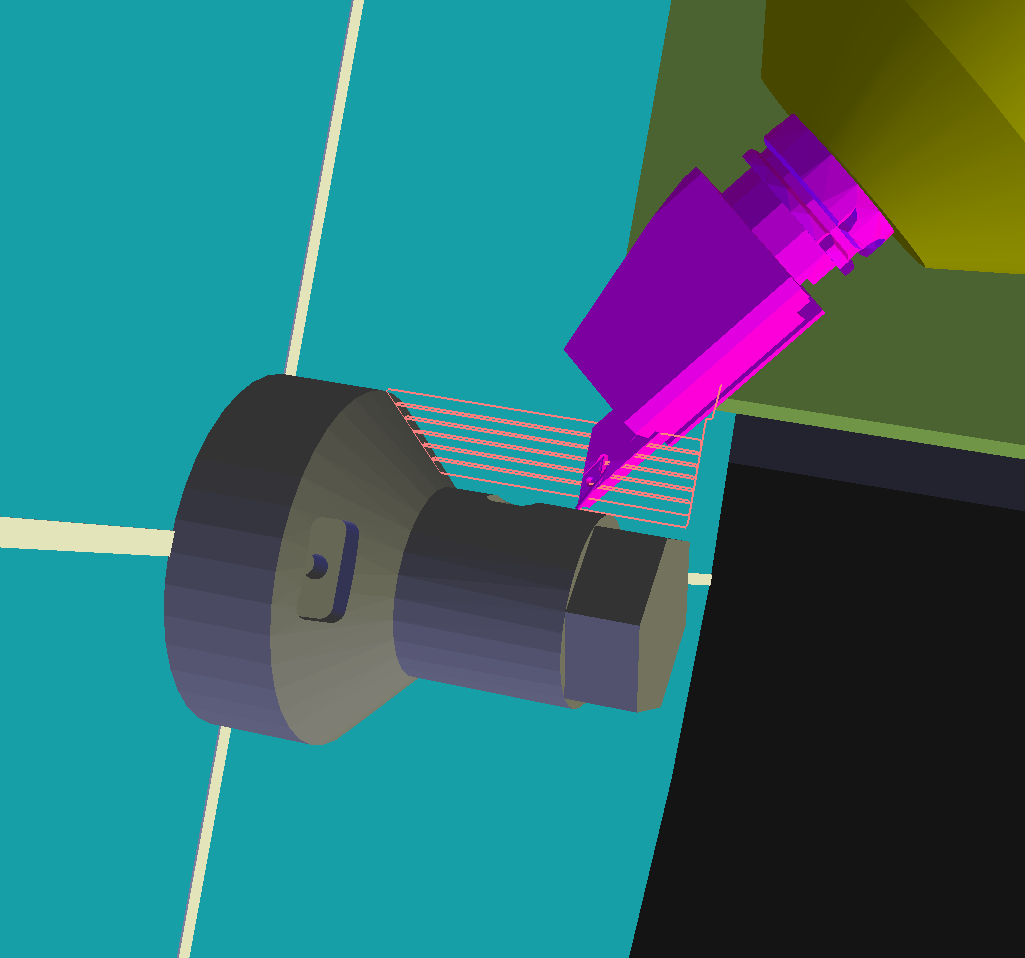
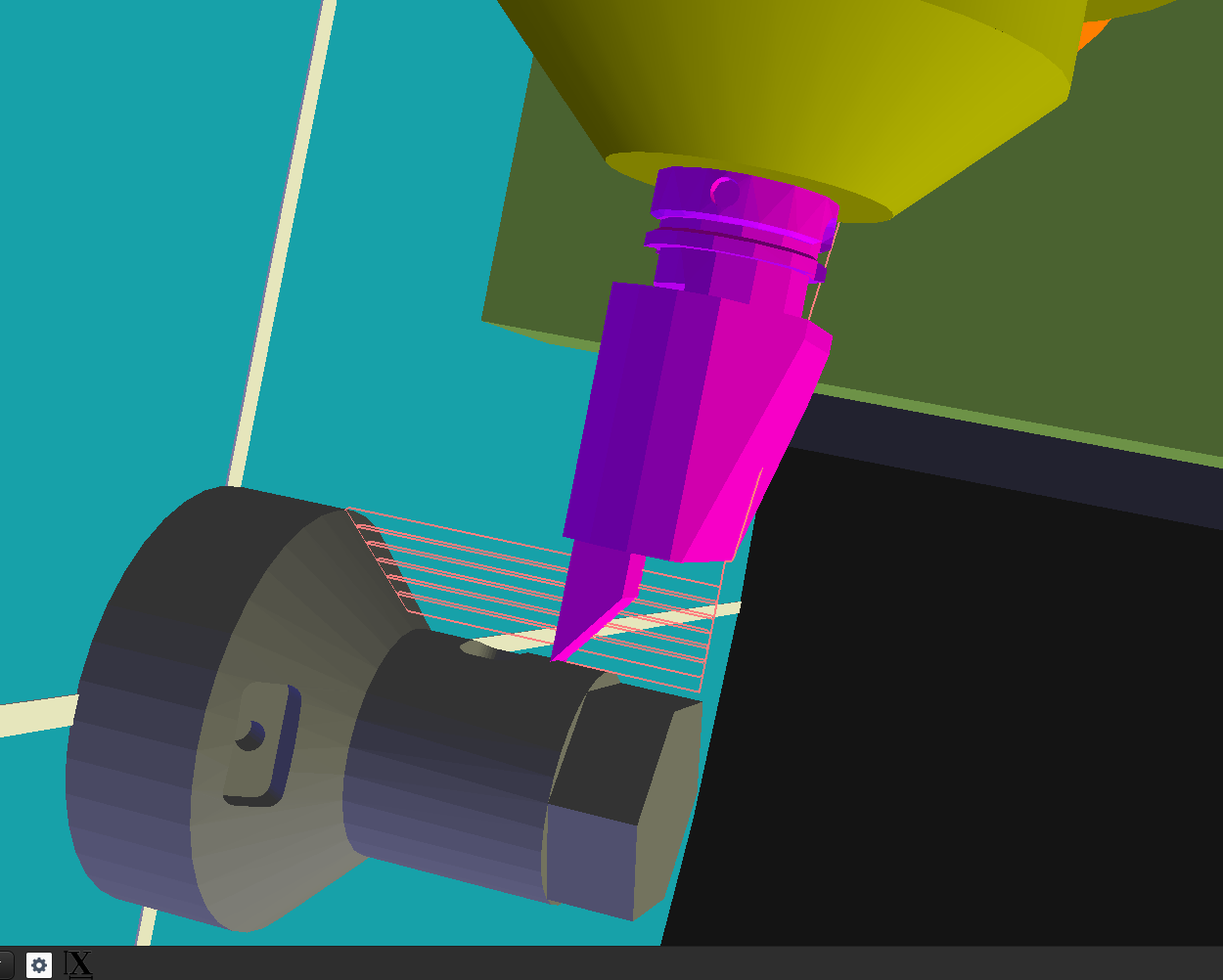
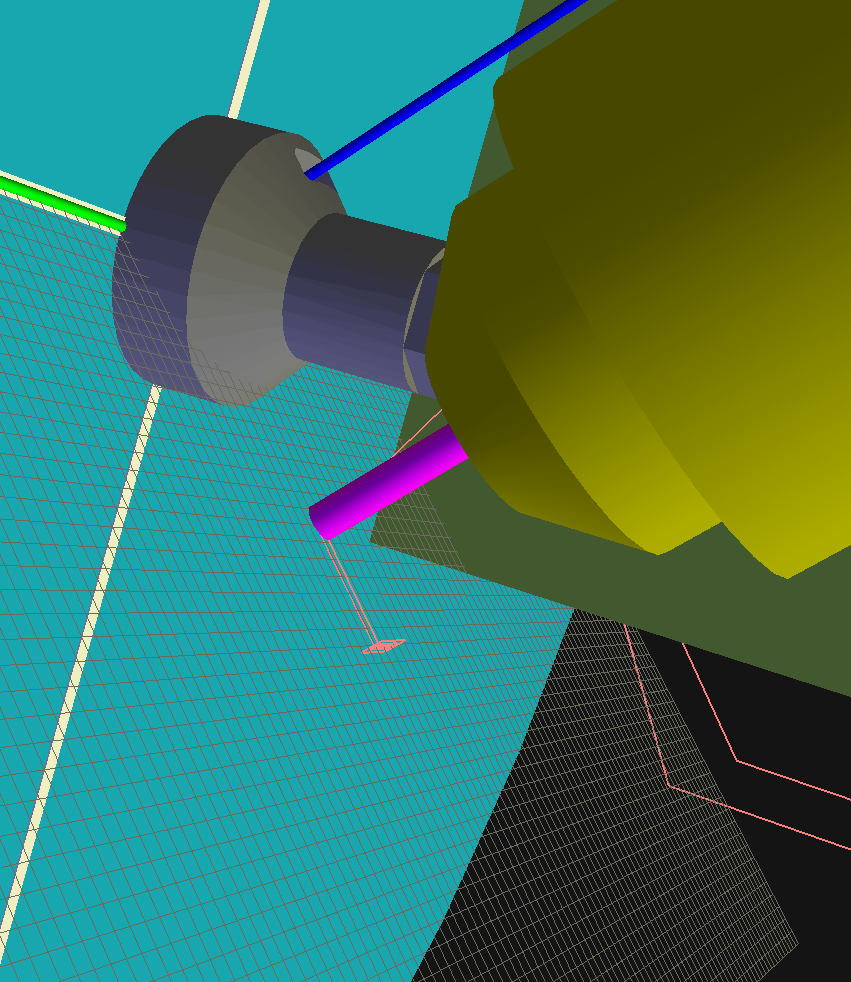
Replied by Aciera on topic Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Category: Advanced Configuration
- Roger S
- Roger S
07 May 2025 15:13
- Tntmold
- Tntmold
07 May 2025 14:29
Replied by Tntmold on topic General Questions about using ethercat
General Questions about using ethercat
Category: EtherCAT
- tommylight

07 May 2025 14:22
Replied by tommylight on topic G-code file loading at G53 instead of G54
G-code file loading at G53 instead of G54
Category: Qtvcp
- Rune_cnc
- Rune_cnc
07 May 2025 13:28
Replied by Rune_cnc on topic Using npn Inductive sensor for end stop.
Using npn Inductive sensor for end stop.
Category: Basic Configuration
- vpomerleau
- vpomerleau
07 May 2025 12:22 - 07 May 2025 12:35
Replied by vpomerleau on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- jochen91
- jochen91
07 May 2025 12:15 - 07 May 2025 12:19
Replied by jochen91 on topic Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Category: Advanced Configuration
- jochen91
- jochen91
07 May 2025 12:13
Replied by jochen91 on topic Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Category: Advanced Configuration
- Aciera
07 May 2025 12:12
Replied by Aciera on topic Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Category: Advanced Configuration
- Grotius

07 May 2025 12:04
Replied by Grotius on topic LinuxCNC S-Curve Accelerations
LinuxCNC S-Curve Accelerations
Category: General LinuxCNC Questions
- Spyderbreath

07 May 2025 12:00 - 07 May 2025 16:17
Replied by Spyderbreath on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- RNJFAB
- RNJFAB
07 May 2025 11:56
Replied by RNJFAB on topic Job not showing in position - 2.9.4 - v2.9-238.315
Job not showing in position - 2.9.4 - v2.9-238.315
Category: Plasmac
- Aciera
07 May 2025 11:54
Replied by Aciera on topic Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Category: Advanced Configuration
- DarkPhoinix
- DarkPhoinix
07 May 2025 10:48 - 07 May 2025 13:19
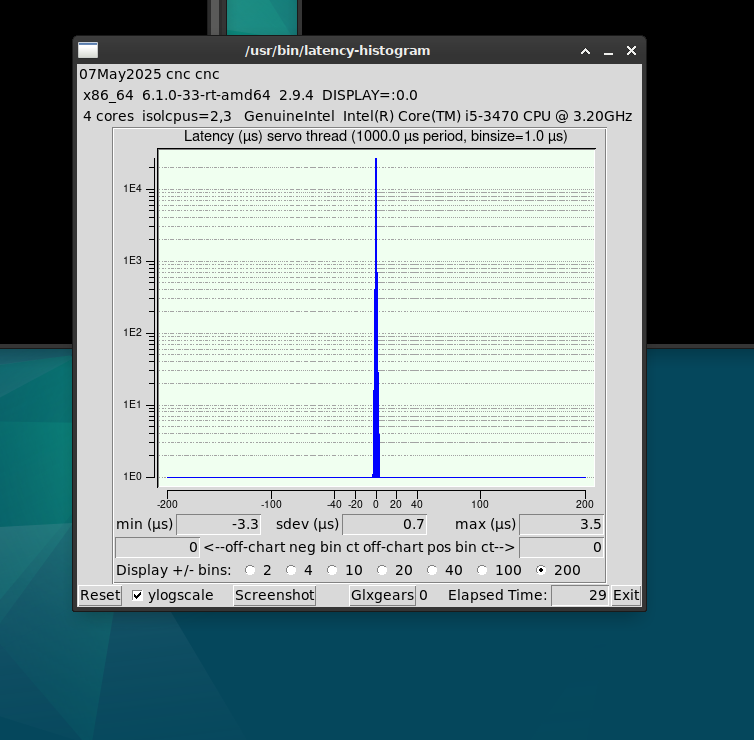
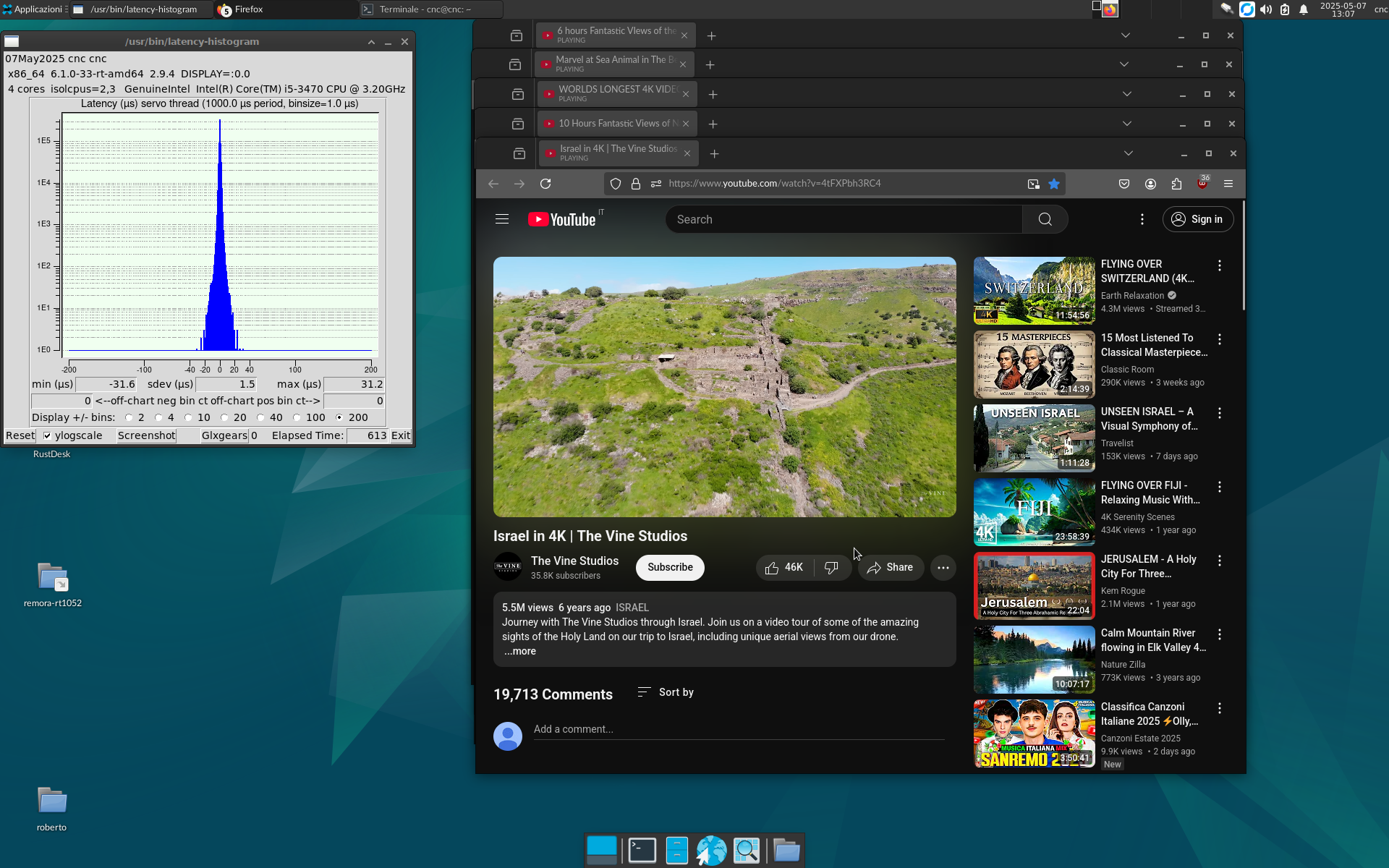
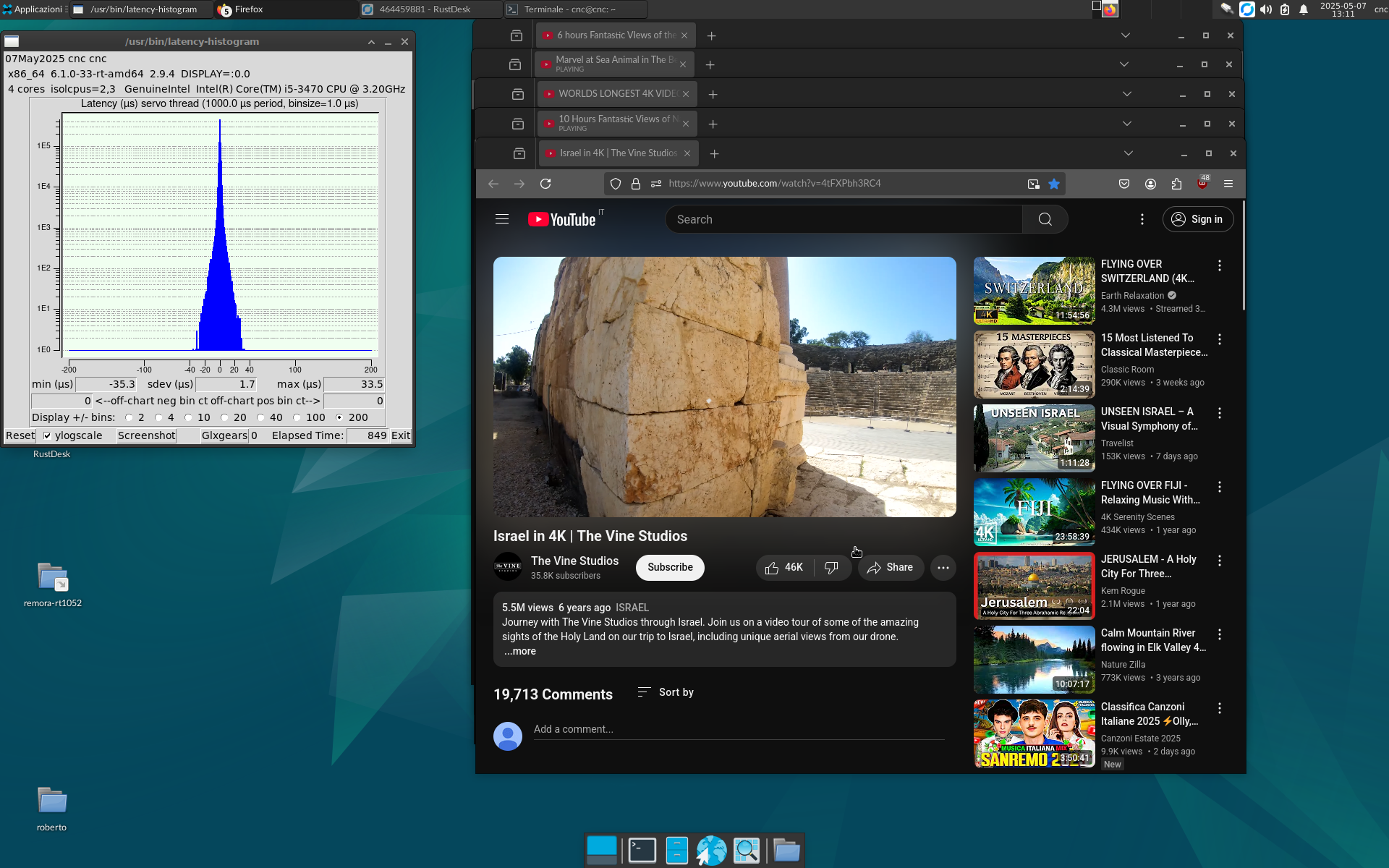
Replied by DarkPhoinix on topic [SOLVED]linuxcnc Latency test ambiguous results
[SOLVED]linuxcnc Latency test ambiguous results
Category: General LinuxCNC Questions
Time to create page: 1.955 seconds