Search Results (Searched for: )
- Hakan
- Hakan
04 May 2025 13:41
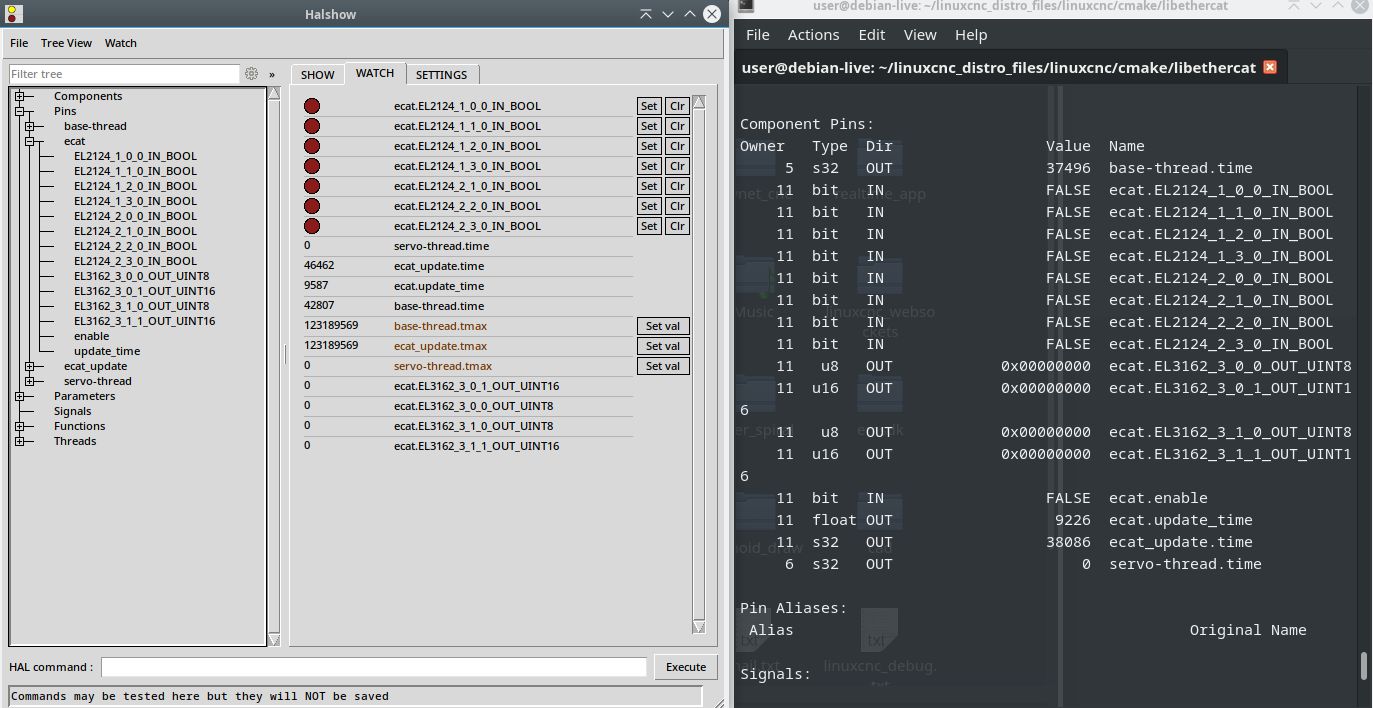
Replied by Hakan on topic Lcnc & Ethercat data types, Ethercat automated hal pin setup.
Lcnc & Ethercat data types, Ethercat automated hal pin setup.
Category: General LinuxCNC Questions
- Aciera

04 May 2025 13:25 - 04 May 2025 14:38
Replied by Aciera on topic Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Planning to Retrofit a Mazak Integrex200Y Mill-Turn Machine
Category: Advanced Configuration
- tommylight

04 May 2025 13:16
Replied by tommylight on topic + and - both go same direction
+ and - both go same direction
Category: Basic Configuration
- Hakan
- Hakan
04 May 2025 13:11 - 04 May 2025 13:14
Replied by Hakan on topic Lcnc & Ethercat data types, Ethercat automated hal pin setup.
Lcnc & Ethercat data types, Ethercat automated hal pin setup.
Category: General LinuxCNC Questions
- Hakan
- Hakan
04 May 2025 13:02
- Roger S
- Roger S
04 May 2025 12:41
- MennilTossFlykune
- MennilTossFlykune
04 May 2025 12:30
Replied by MennilTossFlykune on topic CamWorks (Solidworks) Post processor
CamWorks (Solidworks) Post processor
Category: Post Processors
- pgf
- pgf
04 May 2025 12:26
Replied by pgf on topic comparing to Grbl, or FluidNC
comparing to Grbl, or FluidNC
Category: Milling Machines
")
- TMLKyza
- TMLKyza
04 May 2025 12:23
Replied by TMLKyza on topic CamWorks (Solidworks) Post processor
CamWorks (Solidworks) Post processor
Category: Post Processors
- IB_CnC
- IB_CnC
04 May 2025 12:22
Replied by IB_CnC on topic Probe Basic and Carousel ATC with Geneva and Stepper
Probe Basic and Carousel ATC with Geneva and Stepper
Category: QtPyVCP
- Lcvette

04 May 2025 11:32
Replied by Lcvette on topic Probe Basic and Carousel ATC with Geneva and Stepper
Probe Basic and Carousel ATC with Geneva and Stepper
Category: QtPyVCP
- besriworld
- besriworld
04 May 2025 11:23 - 04 May 2025 11:26
Replied by besriworld on topic OLD Lathe conversion to a CNC
OLD Lathe conversion to a CNC
Category: Turning
- machinedude

04 May 2025 11:14
Replied by machinedude on topic Black Friday Deal got me :)
Black Friday Deal got me :)
Category: Plasma & Laser
") But that's a good thing it creates innovation
But that's a good thing it creates innovation - Grotius

04 May 2025 11:10
- epineh
- epineh
04 May 2025 09:51
Replied by epineh on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
Time to create page: 0.589 seconds