Search Results (Searched for: )
- Aciera

20 Dec 2024 12:19 - 20 Dec 2024 12:21
- RNJFAB
- RNJFAB
20 Dec 2024 10:13
- RNJFAB
- RNJFAB
20 Dec 2024 10:05
Replied by RNJFAB on topic Homemade, cheap, plasma CNC
Homemade, cheap, plasma CNC
Category: Show Your Stuff
- abdulasis12
- abdulasis12
20 Dec 2024 10:03
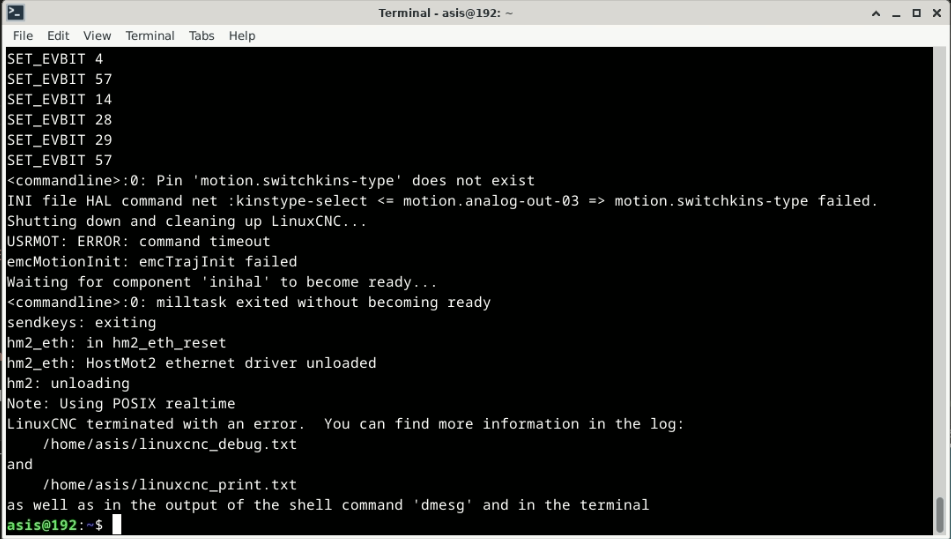
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Skew correction/perpendicularity correction (millkins or millkins_xyz)
Category: Basic Configuration
- Cong
- Cong
20 Dec 2024 09:03
How to build linuxcnc on buildroot? was created by Cong
How to build linuxcnc on buildroot?
Category: General LinuxCNC Questions
- Aciera
20 Dec 2024 08:53
Replied by Aciera on topic Fast Hole EDM from Hacked Parts
Fast Hole EDM from Hacked Parts
Category: General LinuxCNC Questions
- CaspianCmonster
- CaspianCmonster
20 Dec 2024 08:30
Replied by CaspianCmonster on topic Should I update
Should I update
Category: General LinuxCNC Questions
")
- Aciera
20 Dec 2024 08:30
- Hakan
- Hakan
20 Dec 2024 08:25
Replied by Hakan on topic Ethercat installation from repositories - how to step by step
Ethercat installation from repositories - how to step by step
Category: EtherCAT
- Mr. Mass

20 Dec 2024 07:05



- timo
- timo
20 Dec 2024 06:08
- Tchefter

20 Dec 2024 05:04
Replied by Tchefter on topic Linux CNC auf Virtualbox Simulation
Linux CNC auf Virtualbox Simulation
Category: Deutsch
- Cant do this anymore bye all

20 Dec 2024 04:54
Replied by Cant do this anymore bye all on topic Some new Linux CNC board by Bigtreetech looks cool still trying to get more info
Some new Linux CNC board by Bigtreetech looks cool still trying to get more info
Category: Computers and Hardware
- abdulasis12
- abdulasis12
20 Dec 2024 04:51
Replied by abdulasis12 on topic Skew correction/perpendicularity correction (millkins or millkins_xyz)
Skew correction/perpendicularity correction (millkins or millkins_xyz)
Category: Basic Configuration
- IronManDylan
- IronManDylan
20 Dec 2024 04:28
Replied by IronManDylan on topic Fast Hole EDM from Hacked Parts
Fast Hole EDM from Hacked Parts
Category: General LinuxCNC Questions
Time to create page: 0.458 seconds