Search Results (Searched for: )
- gbestwick
- gbestwick
11 Dec 2024 22:53 - 11 Dec 2024 22:55
Issue with halcmd show pin not showing pins. was created by gbestwick
Issue with halcmd show pin not showing pins.
Category: EtherCAT
- Masterdrive
- Masterdrive
11 Dec 2024 21:41
Replied by Masterdrive on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- gardenweazel

11 Dec 2024 21:27
- gardenweazel
11 Dec 2024 21:23
Replied by gardenweazel on topic Inconsistent values from Versaprobe
Inconsistent values from Versaprobe
Category: Qtvcp
- cmorley
- cmorley
11 Dec 2024 20:47
- schnellmued
- schnellmued
11 Dec 2024 19:51
Replied by schnellmued on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- fully_defined
11 Dec 2024 18:10
Replied by fully_defined on topic Rotary Selector Switches & Resistors
Rotary Selector Switches & Resistors
Category: General LinuxCNC Questions
- gardenweazel
11 Dec 2024 17:48 - 11 Dec 2024 17:58
- macrimarco001
- macrimarco001
11 Dec 2024 17:18 - 11 Dec 2024 19:06
Replied by macrimarco001 on topic Newbie looking for a hardware configuration based on Raspberry Pi
Newbie looking for a hardware configuration based on Raspberry Pi
Category: Computers and Hardware
 .
.- gilesclement
- gilesclement
11 Dec 2024 16:18
Replied by gilesclement on topic Mill Single Point Spline Broaching - Spindle Orient?
Mill Single Point Spline Broaching - Spindle Orient?
Category: Advanced Configuration
- PCW

11 Dec 2024 15:23
Replied by PCW on topic Changing stepgen position-scale parameter dynamically
Changing stepgen position-scale parameter dynamically
Category: Basic Configuration
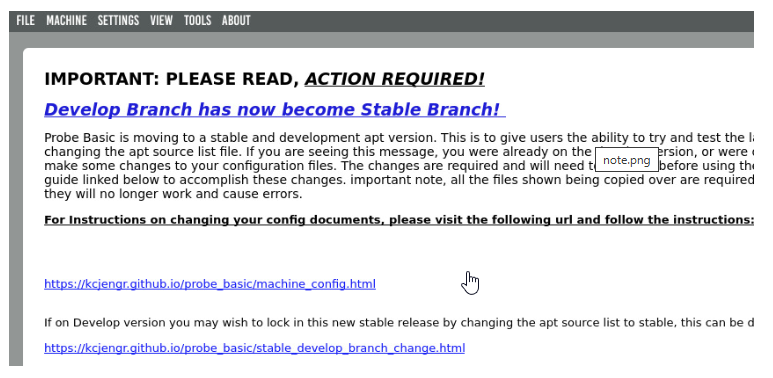
- Lcvette

11 Dec 2024 15:15 - 11 Dec 2024 15:44
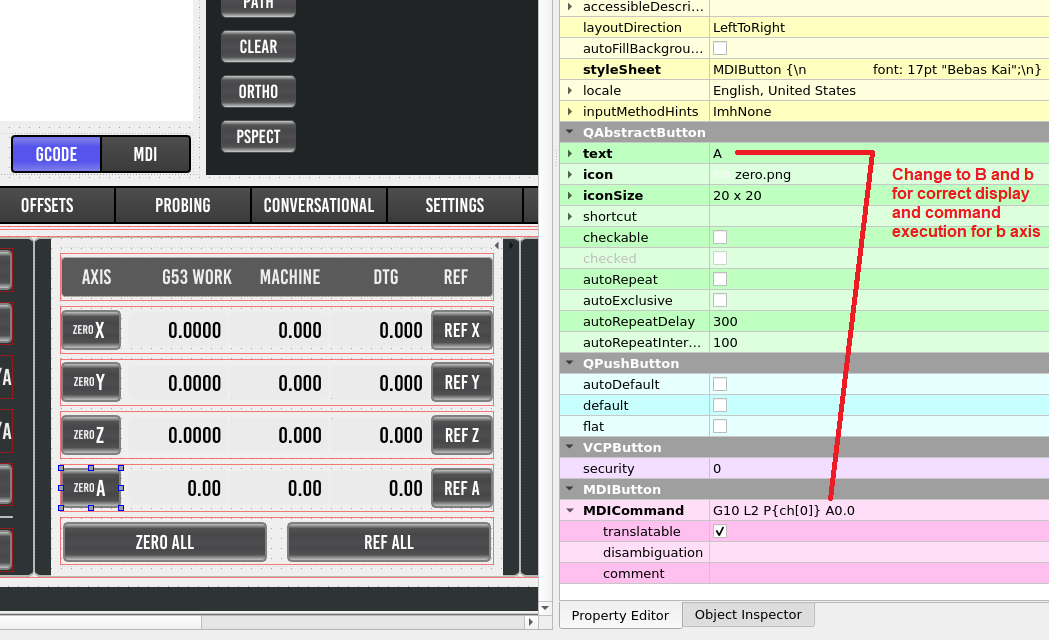
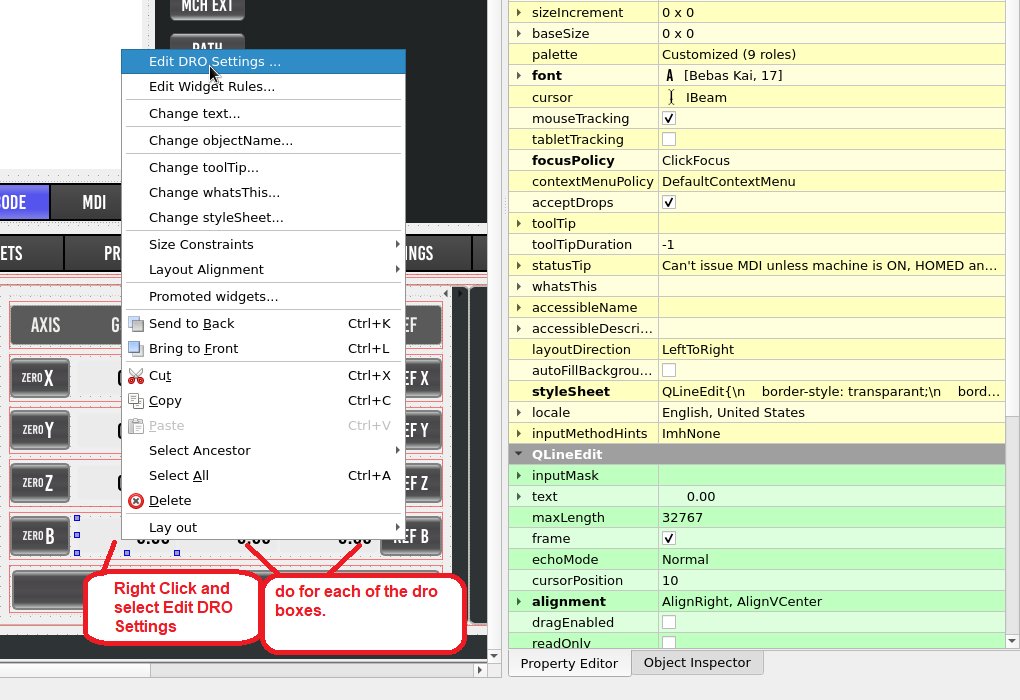
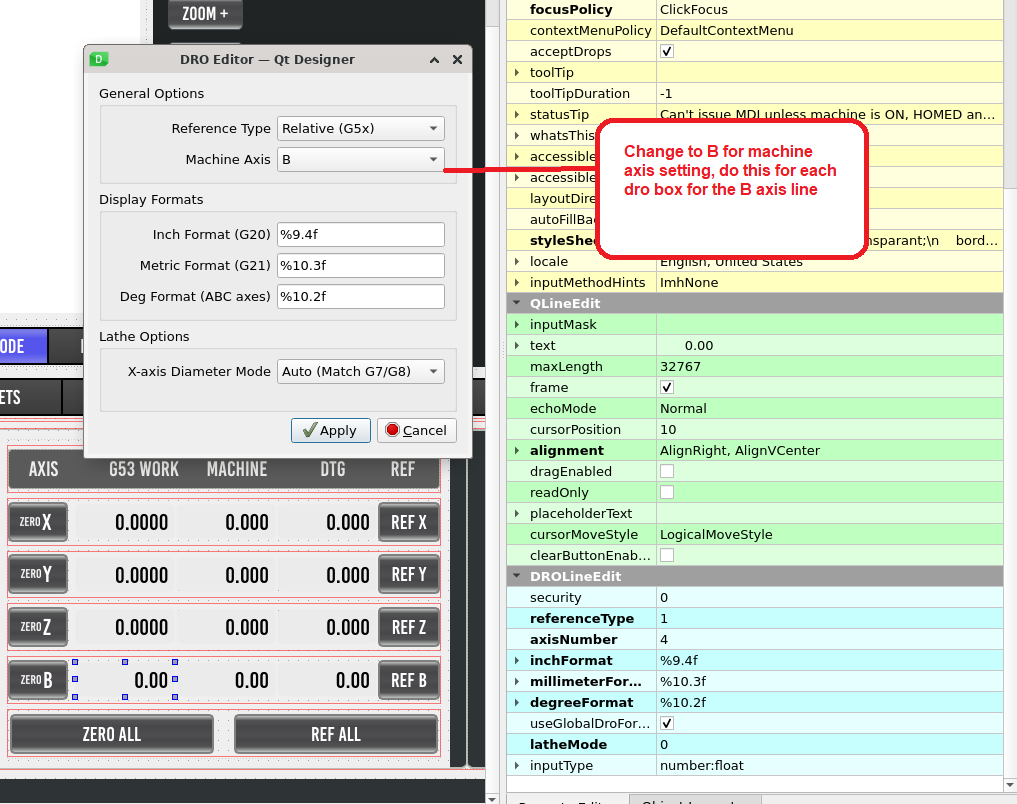
- Lcvette
11 Dec 2024 14:58
- Lcvette
11 Dec 2024 14:54
Replied by Lcvette on topic Probe Basic is splitting into Stable and Develop apt branch
Probe Basic is splitting into Stable and Develop apt branch
Category: QtPyVCP
Time to create page: 0.699 seconds