Search Results (Searched for: )
- meister
- meister
09 Dec 2024 12:17 - 09 Dec 2024 12:17
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware

- daveyr
- daveyr
09 Dec 2024 12:07 - 09 Dec 2024 12:59
Replied by daveyr on topic Ethercat-conf.xml with beckhoff el1008
Ethercat-conf.xml with beckhoff el1008
Category: EtherCAT
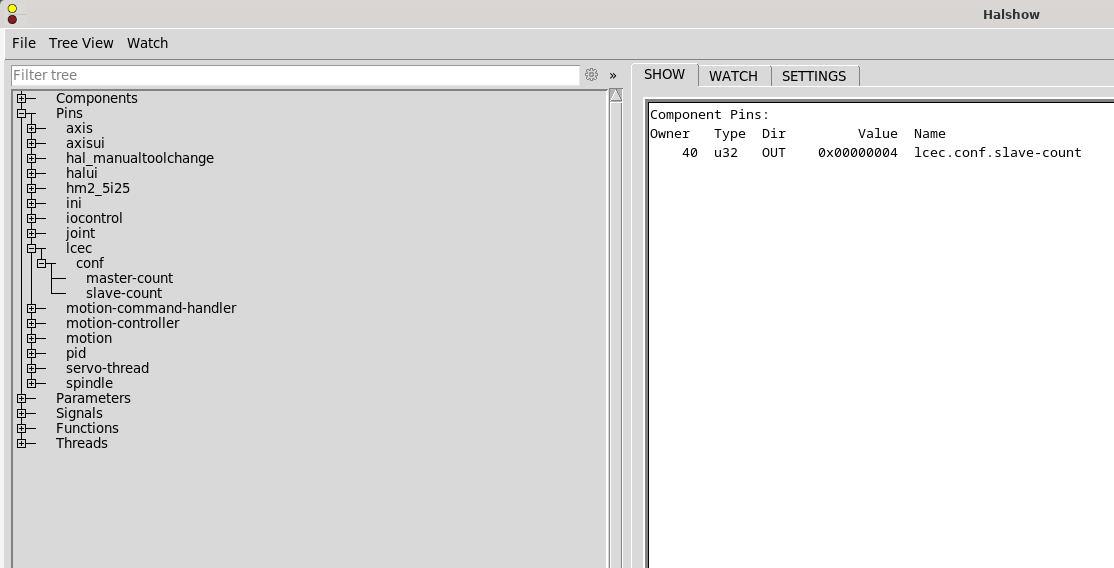
") It looks like you maybe missing the link to the XML file in your hal? as you are not showing the EK1100 in the list of Pins.
It looks like you maybe missing the link to the XML file in your hal? as you are not showing the EK1100 in the list of Pins.- partec
- partec
09 Dec 2024 11:12
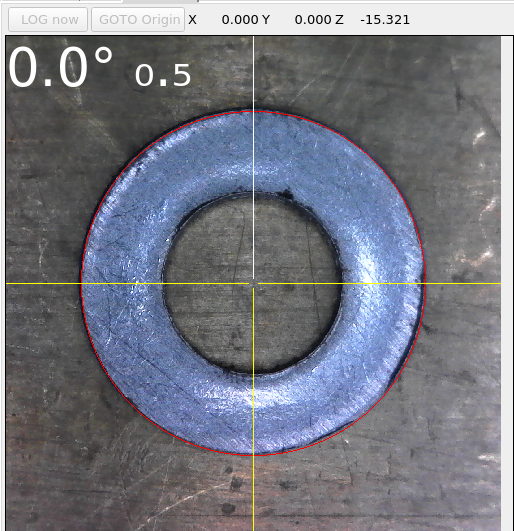
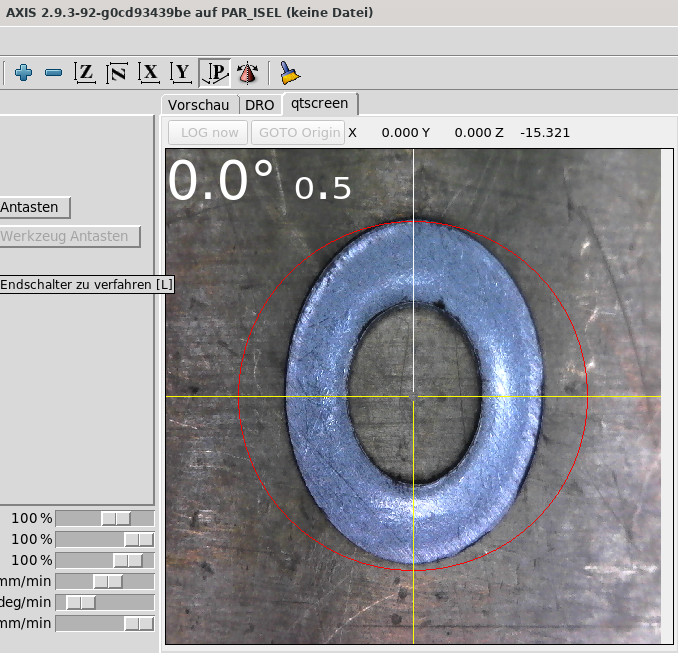
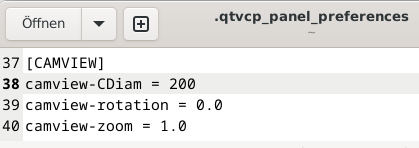
Replied by partec on topic camera resolution doesn' fit
camera resolution doesn' fit
Category: Qtvcp
- my1987toyota

09 Dec 2024 10:49
FreeCAD 1.0 Who's using it? was created by my1987toyota
FreeCAD 1.0 Who's using it?
Category: CAD CAM
- vibram
- vibram
09 Dec 2024 09:36 - 09 Dec 2024 09:36
Replied by vibram on topic Ethercat-conf.xml with beckhoff el1008
Ethercat-conf.xml with beckhoff el1008
Category: EtherCAT
- abdulasis12
- abdulasis12
09 Dec 2024 08:55
Replied by abdulasis12 on topic Feedback control XY not full speed run G1 when curve or Arc
Feedback control XY not full speed run G1 when curve or Arc
Category: General LinuxCNC Questions
- meister
- meister
09 Dec 2024 08:41
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- MirkoCNC
- MirkoCNC
09 Dec 2024 08:23
Replied by MirkoCNC on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- partec
- partec
09 Dec 2024 08:18 - 09 Dec 2024 10:46
Replied by partec on topic camera resolution doesn' fit
camera resolution doesn' fit
Category: Qtvcp

- MirkoCNC
- MirkoCNC
09 Dec 2024 08:16
Replied by MirkoCNC on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- cmorley
- cmorley
09 Dec 2024 04:26
- snowgoer540

09 Dec 2024 04:11
- fully_defined
09 Dec 2024 01:18

- jmelson
- jmelson
09 Dec 2024 00:53
Replied by jmelson on topic Kuka robot project - hardware choice
Kuka robot project - hardware choice
Category: Driver Boards
- JT

09 Dec 2024 00:47
Time to create page: 0.477 seconds