Search Results (Searched for: )
- rbobey1989

20 Mar 2025 23:26 - 20 Mar 2025 23:50
Closed Loop DC Motor Remora EC500 was created by rbobey1989
Closed Loop DC Motor Remora EC500
Category: General LinuxCNC Questions
- Tinker
- Tinker
20 Mar 2025 23:26
Replied by Tinker on topic 7I97T joint following error
7I97T joint following error
Category: General LinuxCNC Questions
- PCW

20 Mar 2025 22:56 - 20 Mar 2025 23:02
Replied by PCW on topic 7I97T joint following error
7I97T joint following error
Category: General LinuxCNC Questions
- Simi02
- Simi02
20 Mar 2025 22:41
- Tntmold
- Tntmold
20 Mar 2025 22:17
Replied by Tntmold on topic General Questions about using ethercat
General Questions about using ethercat
Category: EtherCAT
- tsaG
- tsaG
20 Mar 2025 21:49
Replied by tsaG on topic Getting iocontrol.0.tool-prep-pocket to work
Getting iocontrol.0.tool-prep-pocket to work
Category: Advanced Configuration
- tsaG
- tsaG
20 Mar 2025 21:47
Replied by tsaG on topic No parameters forwarded to M6 script?
No parameters forwarded to M6 script?
Category: QtPyVCP
- tommylight

20 Mar 2025 21:41
- tommylight
20 Mar 2025 21:15
Replied by tommylight on topic 7I97T joint following error
7I97T joint following error
Category: General LinuxCNC Questions
- tommylight
20 Mar 2025 21:08
- Grotius

20 Mar 2025 21:03 - 21 Mar 2025 20:20
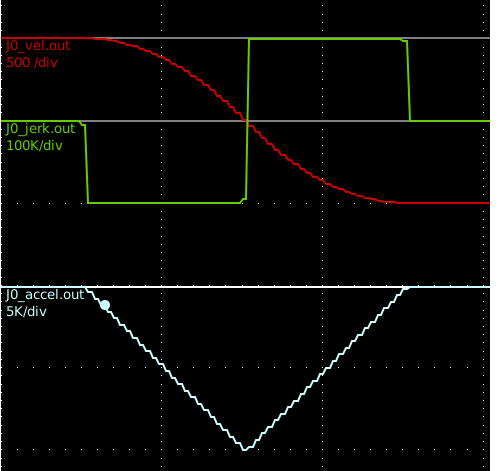
Replied by Grotius on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- ruediger123
- ruediger123
20 Mar 2025 20:53
Replied by ruediger123 on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- Tinker
- Tinker
20 Mar 2025 19:45
Replied by Tinker on topic 7I97T joint following error
7I97T joint following error
Category: General LinuxCNC Questions
- Aciera

20 Mar 2025 19:43
Replied by Aciera on topic C Axis as Second Spindle
C Axis as Second Spindle
Category: General LinuxCNC Questions
- RotarySMP

20 Mar 2025 19:39
Time to create page: 1.076 seconds