Search Results (Searched for: )
- MTTI

22 Feb 2025 09:07
For the needs of my workshop, I built this plasma table.
The usable cutting area is 2790x1200mm, and it is equipped with a Hypertherm Powermax 105 SYNC, allowing cuts up to 32mm of steel.
I initially used the control unit from my CNC milling machine along with Mach3, but I was very limited in terms of available options.
recently upgraded it to fully utilize all the possibilities of LinuxCNC/QtPlasmaC.
This is the V2, I will start the V3 soon with a complete rebuild and complete new mecanical design
Here are some photos:



Yesterday's job, 15mm steel:


My Homemade plasma CNC was created by MTTI
My Homemade plasma CNC
Category: Show Your Stuff
For the needs of my workshop, I built this plasma table.
The usable cutting area is 2790x1200mm, and it is equipped with a Hypertherm Powermax 105 SYNC, allowing cuts up to 32mm of steel.
I initially used the control unit from my CNC milling machine along with Mach3, but I was very limited in terms of available options.
recently upgraded it to fully utilize all the possibilities of LinuxCNC/QtPlasmaC.
This is the V2, I will start the V3 soon with a complete rebuild and complete new mecanical design
Here are some photos:
Yesterday's job, 15mm steel:
- MTTI
22 Feb 2025 08:52 - 22 Feb 2025 08:53
Replied by MTTI on topic Probe function not working after final adjustments
Probe function not working after final adjustments
Category: Plasmac
I found the problem but "too late", it was this line into the .hal exemple file from QtPlasmaC that i'm using:
net plasmac:axis-position joint.2.pos-fb => plasmac.axis-z-position
Into this configuration file the Z axis is supposed to be on joint.2 but it was in my case on joint.3 (joint.2 was Y2).
net plasmac:axis-position joint.2.pos-fb => plasmac.axis-z-position
Into this configuration file the Z axis is supposed to be on joint.2 but it was in my case on joint.3 (joint.2 was Y2).
- azim4411
- azim4411
22 Feb 2025 08:46
Replied by azim4411 on topic Elumatec SBZ 130/01 retrofit
Elumatec SBZ 130/01 retrofit
Category: CNC Machines
Forgot to include the picture of the Z-axis so here you go. Also noticed that the y and z axis uses the ball screw mechanism while the x-axis uses rack and pinion mechanism.


- azim4411
- azim4411
22 Feb 2025 08:42
Replied by azim4411 on topic Elumatec SBZ 130/01 retrofit
Elumatec SBZ 130/01 retrofit
Category: CNC Machines
Thanks for the advice, Tommy.
After reviewing all the information exchanged so far, do you think it's a good idea to start a new thread about retrofitting our Sbz 130 model?
Basic differences include:
1) all 4 motors are AC 3 Phase, with integrated 2-pole resolvers
2)no short X-axis
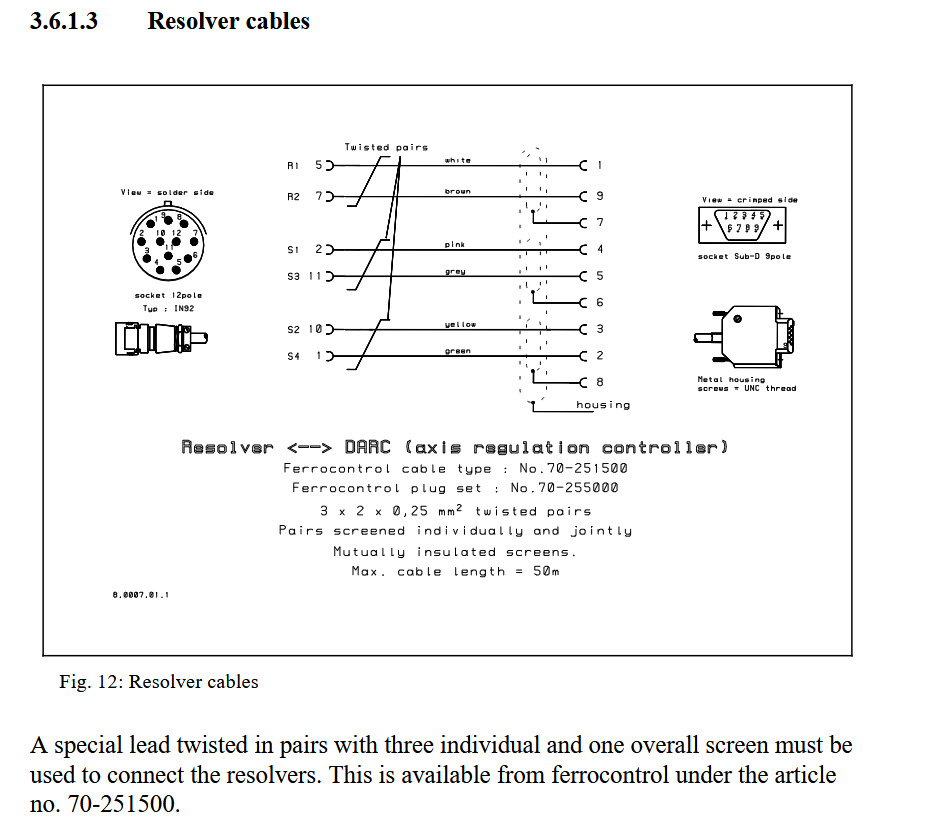
3) newer DARC system (drives motors) (manual attached)
4) possibly different mesa configuration (6i24 7i49 for resolves feedback and - 10V of analog control signals for motors?)
5) 2001 model
6) No pneumatic brakes are used for the x and y axis but we did notice some sort of pneumatic counterweight or brake for the z-axis (picture included)
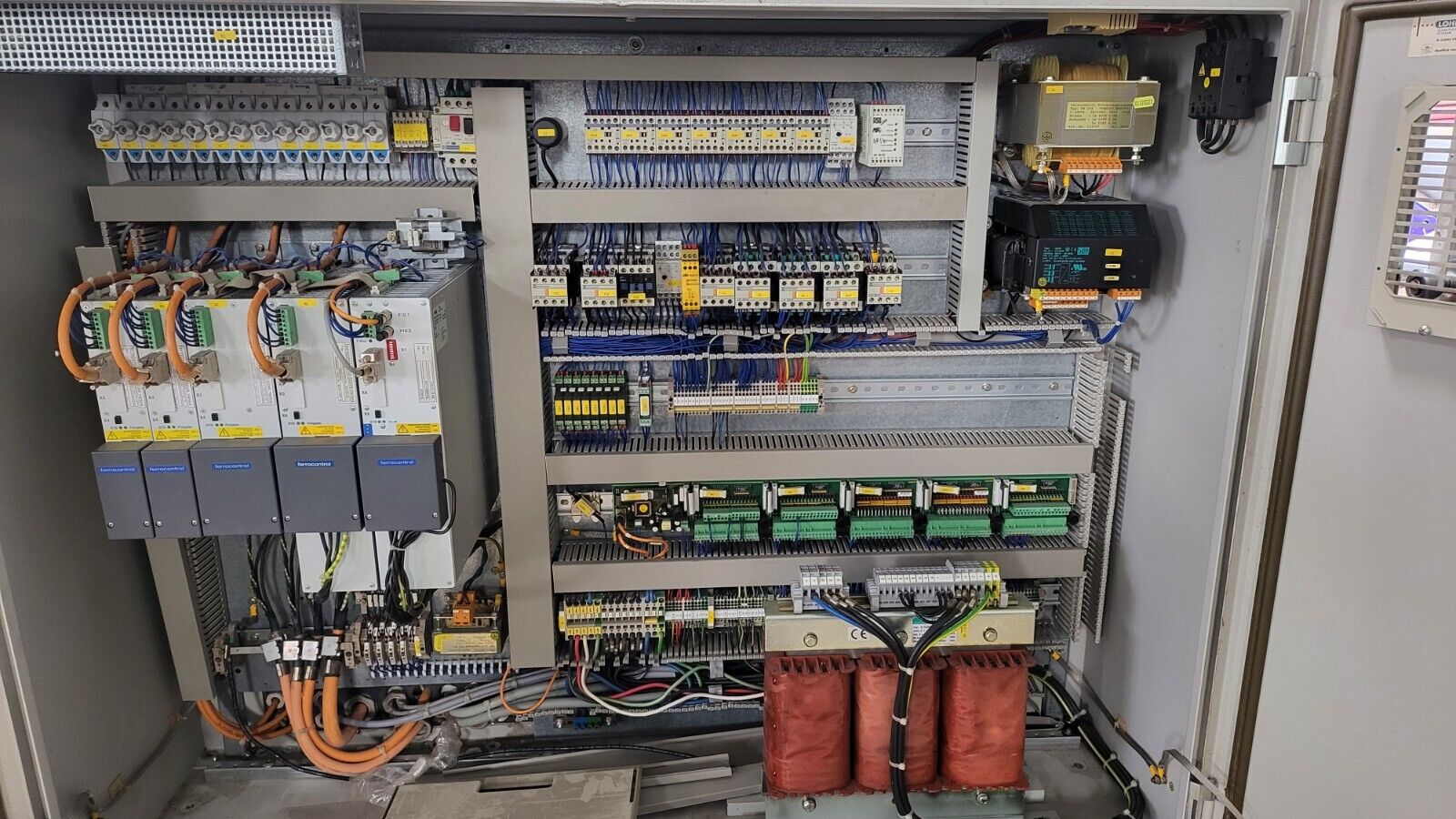
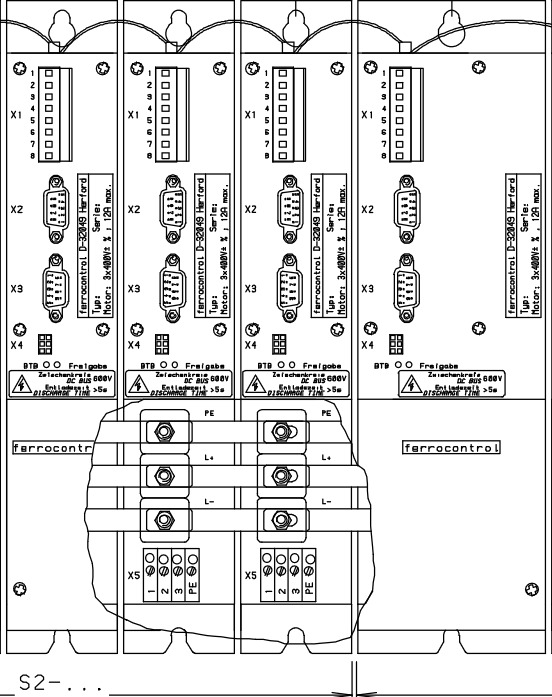
7) In the picture you can see the 'DARC system' comprises of from right to left: supply module, that receives AC 380-415 3ph, then distributes through dc links (metal bars under the grey boxes) L+ L- PE to the other drives (spindle, x, y,z), diagram attached as well.
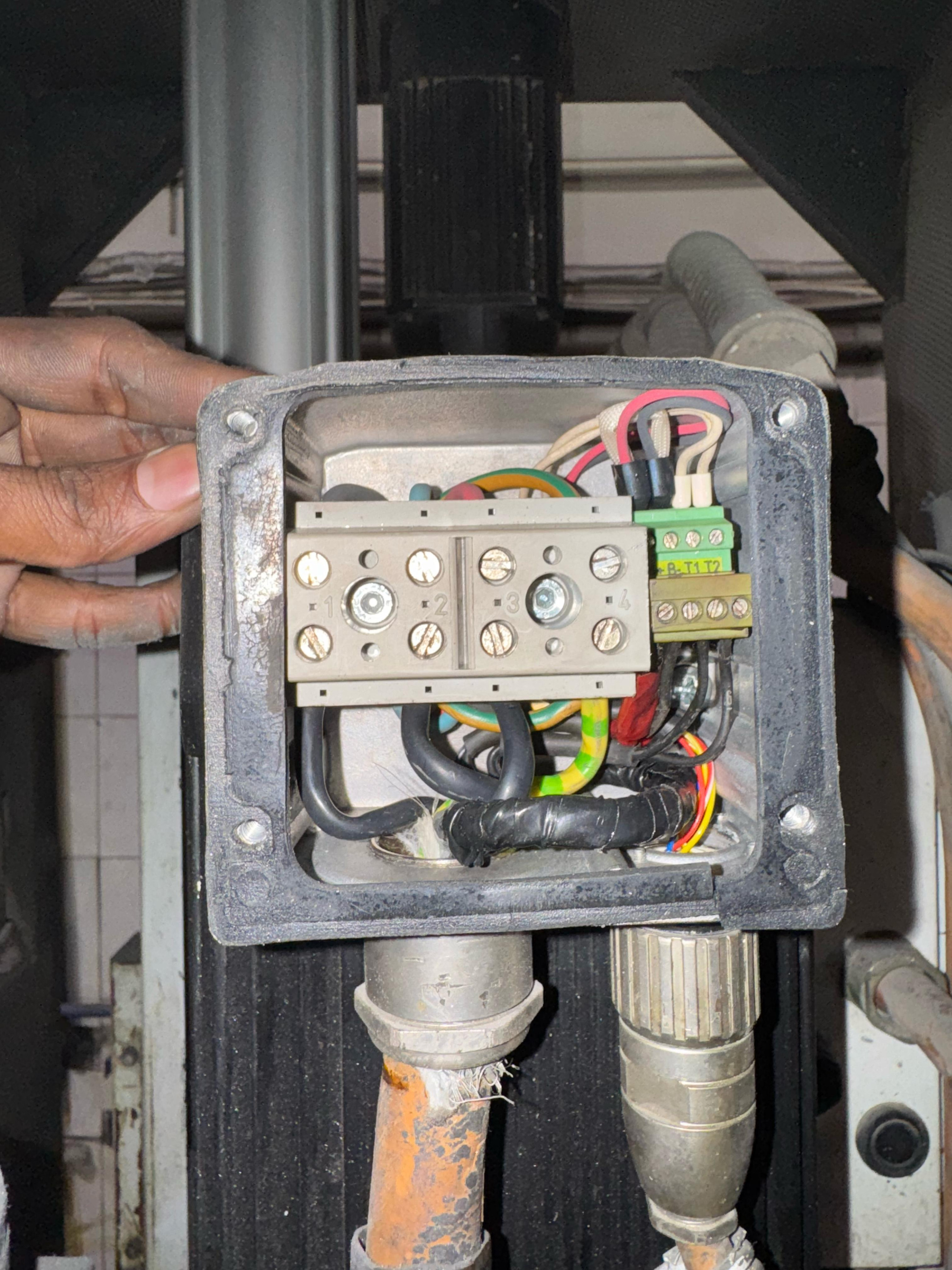
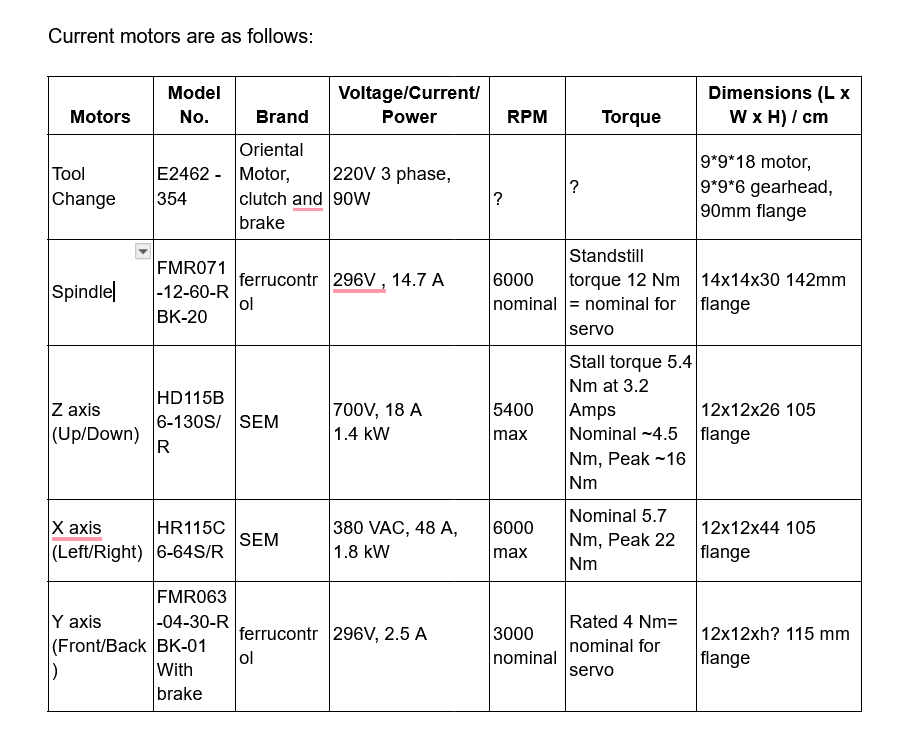
Attached is a picture I got online of the control panel with all the connections intact of the same machine 2001 model. The next picture shows the internal connection on the top side of the spindle motor. The next picture shows the cables for the resolvers found in the DARC manual. A picture of the whole machine in its current condition is also attached. A table containing info about the motors used is also attached. A diagram of the DC linkage is also attached that distributes power to all drives sharing and originating from the supply module, all drives also have inbuilt inverters to send 3 ph AC to their respective motors.
This is a link containing the DARC manual and the electrical schematics for the SBZ 130 - we.tl/t-zhbMsN1qWM

After reviewing all the information exchanged so far, do you think it's a good idea to start a new thread about retrofitting our Sbz 130 model?
Basic differences include:
1) all 4 motors are AC 3 Phase, with integrated 2-pole resolvers
2)no short X-axis
3) newer DARC system (drives motors) (manual attached)
4) possibly different mesa configuration (6i24 7i49 for resolves feedback and - 10V of analog control signals for motors?)
5) 2001 model
6) No pneumatic brakes are used for the x and y axis but we did notice some sort of pneumatic counterweight or brake for the z-axis (picture included)
7) In the picture you can see the 'DARC system' comprises of from right to left: supply module, that receives AC 380-415 3ph, then distributes through dc links (metal bars under the grey boxes) L+ L- PE to the other drives (spindle, x, y,z), diagram attached as well.
Attached is a picture I got online of the control panel with all the connections intact of the same machine 2001 model. The next picture shows the internal connection on the top side of the spindle motor. The next picture shows the cables for the resolvers found in the DARC manual. A picture of the whole machine in its current condition is also attached. A table containing info about the motors used is also attached. A diagram of the DC linkage is also attached that distributes power to all drives sharing and originating from the supply module, all drives also have inbuilt inverters to send 3 ph AC to their respective motors.
This is a link containing the DARC manual and the electrical schematics for the SBZ 130 - we.tl/t-zhbMsN1qWM
- rodw

22 Feb 2025 08:01
Replied by rodw on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
Sorry, my research says zram is not installed by default on Raspberry OS. I don't see this is a Linuxcnc issue.
We've always said to use a 4 GB system and with that much ram, mamory caching is not required.
We've always said to use a 4 GB system and with that much ram, mamory caching is not required.
- Hakan
- Hakan
22 Feb 2025 07:57
- Hakan
- Hakan
22 Feb 2025 07:46
Replied by Hakan on topic EtherCAT plasma torch voltage reader
EtherCAT plasma torch voltage reader
Category: Show Your Stuff
I see, a bit like EasyCAT kind but for the voltage reader.
I am more into putting the torch voltage reader components onto the EaserCAT board.
Now when I have looked at it I am not so worried about the voltage levels and that.
One just need to take some precautions.
And if I understand right, most new plasma cutters gives out scaled down voltage
so it is more to handle the floating voltage, and this circuitry does that.
I am more into putting the torch voltage reader components onto the EaserCAT board.
Now when I have looked at it I am not so worried about the voltage levels and that.
One just need to take some precautions.
And if I understand right, most new plasma cutters gives out scaled down voltage
so it is more to handle the floating voltage, and this circuitry does that.
- Str8jacket
- Str8jacket
22 Feb 2025 06:22
Replied by Str8jacket on topic Deckel-Maho DMU 50T
Deckel-Maho DMU 50T
Category: Milling Machines
Gday, unfortunately I have been snowed under with work and life stuff, all the parts are here now but no time to do anything in the shed. I still need to wire up the shed!
- Sziggy_NC
- Sziggy_NC
22 Feb 2025 04:58
Replied by Sziggy_NC on topic +-10v setup 7i97 & .ini
+-10v setup 7i97 & .ini
Category: General LinuxCNC Questions
Sure, I'll set a reminder on my phone to post them when I'm at the pc. My files might be a little odd though. I started by using JT's config tool. Then compared the result to a 7i97t sample config to get the spindle working. Some of my "net" pin stuff is in io.hal and others are in the main config.hal
I have received a lot of help from everyone on the forum.
I have received a lot of help from everyone on the forum.
- unknown
- unknown
22 Feb 2025 04:54
Replied by unknown on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
zram issue Sat Feb 22, 2025
Big thanks to forum user spina for finding this.
Tho not a game stopper, doesn't seem to affect the operation. Just entries into /var/log/boot.log
Is related to swap.
So far no reports of adverse behavior has been reported.
A reboot can be done now or you can edit the file mentioned below to prior to rebooting.
By default up to 4GB of ram or half the ram is used, depending on how much ram one has.
On my 4GB system I have the following entry, which allocates 1GB to zram swap......the file to edit is after the # symbol.
Apologies for missing this prior to releasing the images.
Big thanks to forum user spina for finding this.
Tho not a game stopper, doesn't seem to affect the operation. Just entries into /var/log/boot.log
Is related to swap.
So far no reports of adverse behavior has been reported.
Feb 20 14:49:54 raspberrypi systemd[1]: Failed to start zramswap.service - Linux zramswap setup.
░░ Subject: A start job for unit zramswap.service has failed
░░ Defined-By: systemd
░░ Support: www.debian.org/support
░░
░░ A start job for unit zramswap.service has finished with a failure.
░░
░░ The job identifier is 119 and the job result is failed.
[/boot]
Issue is related to systemd-zram-generator not being installed.
So what is need is to install the missing package, disable the service that comes with the image, installation of the package installs a new service, finally the log files are rotated. Please only execute the instructions listed below.
[code]
sudo apt update
sudo apt install systemd-zram-generator
sudo systemctl mask zramswap.service
sudo logrotate --force /etc/logrotate.confA reboot can be done now or you can edit the file mentioned below to prior to rebooting.
By default up to 4GB of ram or half the ram is used, depending on how much ram one has.
On my 4GB system I have the following entry, which allocates 1GB to zram swap......the file to edit is after the # symbol.
# /etc/systemd/zram-generator.conf
[zram0]
zram-size = ram / 4Apologies for missing this prior to releasing the images.
- PCW

22 Feb 2025 03:56 - 22 Feb 2025 04:13
Replied by PCW on topic 7I97T joint following error
7I97T joint following error
Category: General LinuxCNC Questions
No motion or PWM is possible because LinuxCNC is not in a machine-on state:
30 bit IN FALSE hm2_7i97.0.pwmgen.00.enable <== joint-0-enable
Also the ferror limit is still 0.001:
23 float OUT 0.001 joint.0.f-error-lim
You cannot start tuning without increasing the min-ferror and
ferror limits(for all joints) or you will get an immediate ferror and
not know the cause.
30 bit IN FALSE hm2_7i97.0.pwmgen.00.enable <== joint-0-enable
Also the ferror limit is still 0.001:
23 float OUT 0.001 joint.0.f-error-lim
You cannot start tuning without increasing the min-ferror and
ferror limits(for all joints) or you will get an immediate ferror and
not know the cause.
- epineh
- epineh
22 Feb 2025 01:16
Replied by epineh on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
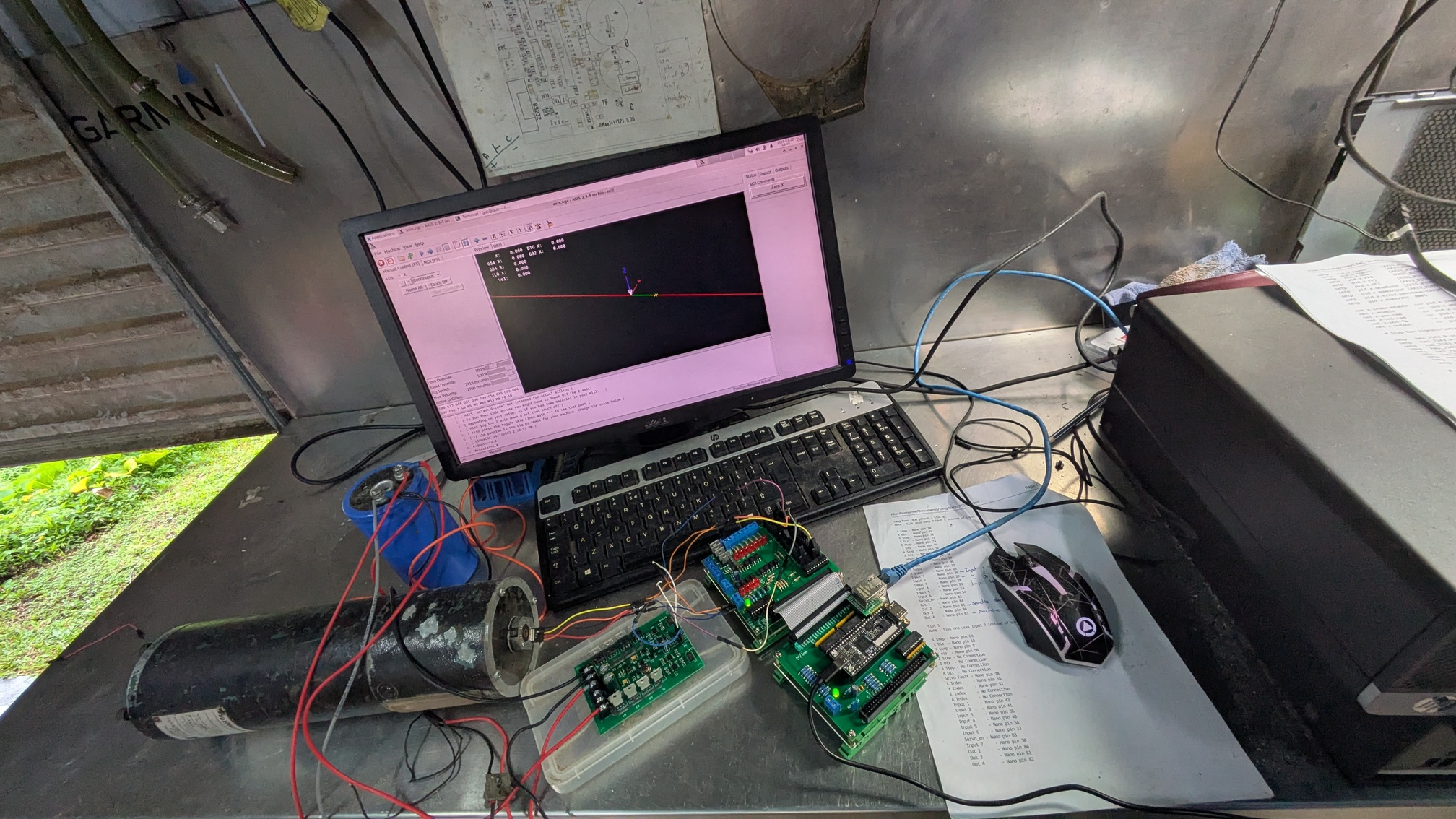
I have managed to get one of my mill servos running on the bench, running closed loop to Linuxcnc via a Tang Nano, works very well, now waiting for PCB's to properly retrofit the mill. Thanks Olli for your awesome work.
- Tinker
- Tinker
22 Feb 2025 00:45
Replied by Tinker on topic 7I97T joint following error
7I97T joint following error
Category: General LinuxCNC Questions
30 bit OUT TRUE hm2_7i97.0.gpio.024.in
30 bit OUT FALSE hm2_7i97.0.gpio.024.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.025.in
30 bit OUT FALSE hm2_7i97.0.gpio.025.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.026.in
30 bit OUT FALSE hm2_7i97.0.gpio.026.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.027.in
30 bit OUT FALSE hm2_7i97.0.gpio.027.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.028.in
30 bit OUT FALSE hm2_7i97.0.gpio.028.in_not
30 bit OUT FALSE hm2_7i97.0.gpio.029.in
30 bit OUT TRUE hm2_7i97.0.gpio.029.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.030.in
30 bit OUT FALSE hm2_7i97.0.gpio.030.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.031.in
30 bit OUT FALSE hm2_7i97.0.gpio.031.in_not
30 bit IN FALSE hm2_7i97.0.gpio.031.out
30 bit OUT FALSE hm2_7i97.0.gpio.032.in
30 bit OUT TRUE hm2_7i97.0.gpio.032.in_not
30 bit IN FALSE hm2_7i97.0.gpio.032.out
30 bit OUT TRUE hm2_7i97.0.gpio.033.in
30 bit OUT FALSE hm2_7i97.0.gpio.033.in_not
30 bit IN FALSE hm2_7i97.0.gpio.033.out
30 bit OUT TRUE hm2_7i97.0.gpio.034.in
30 bit OUT FALSE hm2_7i97.0.gpio.034.in_not
30 bit IN FALSE hm2_7i97.0.gpio.034.out
30 bit OUT TRUE hm2_7i97.0.gpio.035.in
30 bit OUT FALSE hm2_7i97.0.gpio.035.in_not
30 bit IN FALSE hm2_7i97.0.gpio.035.out
30 bit OUT TRUE hm2_7i97.0.gpio.036.in
30 bit OUT FALSE hm2_7i97.0.gpio.036.in_not
30 bit IN FALSE hm2_7i97.0.gpio.036.out
30 bit OUT TRUE hm2_7i97.0.gpio.037.in
30 bit OUT FALSE hm2_7i97.0.gpio.037.in_not
30 bit IN FALSE hm2_7i97.0.gpio.037.out
30 bit OUT TRUE hm2_7i97.0.gpio.038.in
30 bit OUT FALSE hm2_7i97.0.gpio.038.in_not
30 bit IN FALSE hm2_7i97.0.gpio.038.out
30 bit OUT TRUE hm2_7i97.0.gpio.039.in
30 bit OUT FALSE hm2_7i97.0.gpio.039.in_not
30 bit IN FALSE hm2_7i97.0.gpio.039.out
30 bit OUT TRUE hm2_7i97.0.gpio.040.in
30 bit OUT FALSE hm2_7i97.0.gpio.040.in_not
30 bit IN FALSE hm2_7i97.0.gpio.040.out
30 bit OUT TRUE hm2_7i97.0.gpio.041.in
30 bit OUT FALSE hm2_7i97.0.gpio.041.in_not
30 bit IN FALSE hm2_7i97.0.gpio.041.out
30 bit OUT TRUE hm2_7i97.0.gpio.042.in
30 bit OUT FALSE hm2_7i97.0.gpio.042.in_not
30 bit IN FALSE hm2_7i97.0.gpio.042.out
30 bit OUT TRUE hm2_7i97.0.gpio.043.in
30 bit OUT FALSE hm2_7i97.0.gpio.043.in_not
30 bit IN FALSE hm2_7i97.0.gpio.043.out
30 bit OUT TRUE hm2_7i97.0.gpio.044.in
30 bit OUT FALSE hm2_7i97.0.gpio.044.in_not
30 bit IN FALSE hm2_7i97.0.gpio.044.out
30 bit OUT TRUE hm2_7i97.0.gpio.045.in
30 bit OUT FALSE hm2_7i97.0.gpio.045.in_not
30 bit IN FALSE hm2_7i97.0.gpio.045.out
30 bit OUT TRUE hm2_7i97.0.gpio.046.in
30 bit OUT FALSE hm2_7i97.0.gpio.046.in_not
30 bit IN FALSE hm2_7i97.0.gpio.046.out
30 bit OUT TRUE hm2_7i97.0.gpio.047.in
30 bit OUT FALSE hm2_7i97.0.gpio.047.in_not
30 bit IN FALSE hm2_7i97.0.gpio.047.out
30 bit OUT TRUE hm2_7i97.0.gpio.048.in
30 bit OUT FALSE hm2_7i97.0.gpio.048.in_not
30 bit IN FALSE hm2_7i97.0.gpio.048.out
30 bit OUT TRUE hm2_7i97.0.gpio.049.in
30 bit OUT FALSE hm2_7i97.0.gpio.049.in_not
30 bit IN FALSE hm2_7i97.0.gpio.049.out
30 bit OUT TRUE hm2_7i97.0.gpio.050.in
30 bit OUT FALSE hm2_7i97.0.gpio.050.in_not
30 bit IN FALSE hm2_7i97.0.gpio.050.out
30 s32 OUT 1 hm2_7i97.0.inmux.00.enc0-count
30 bit IN FALSE hm2_7i97.0.inmux.00.enc0-reset
30 s32 OUT 1 hm2_7i97.0.inmux.00.enc1-count
30 bit IN FALSE hm2_7i97.0.inmux.00.enc1-reset
30 s32 OUT 0 hm2_7i97.0.inmux.00.enc2-count
30 bit IN FALSE hm2_7i97.0.inmux.00.enc2-reset
30 s32 OUT 0 hm2_7i97.0.inmux.00.enc3-count
30 bit IN FALSE hm2_7i97.0.inmux.00.enc3-reset
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-00
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-00-not ==> plus-minus-home-joint-0
30 bit IN FALSE hm2_7i97.0.inmux.00.input-00-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-01
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-01-not ==> minus-home-joint-1
30 bit IN FALSE hm2_7i97.0.inmux.00.input-01-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-02
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-02-not ==> pos-limit-joint-1
30 bit IN FALSE hm2_7i97.0.inmux.00.input-02-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-03
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-03-not ==> plus-home-joint-2
30 bit IN FALSE hm2_7i97.0.inmux.00.input-03-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-04
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-04-not ==> neg-limit-joint-2
30 bit IN FALSE hm2_7i97.0.inmux.00.input-04-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-05
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-05-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-05-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-06
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-06-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-06-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-07
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-07-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-07-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-08
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-08-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-08-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-09
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-09-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-09-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-10
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-10-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-10-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-11
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-11-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-11-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-12
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-12-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-12-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-13
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-13-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-13-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-14
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-14-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-14-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-15
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-15-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-15-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-00
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-00-not
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-01
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-01-not
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-02
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-02-not
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-03
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-03-not
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-04
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-04-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-05
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-05-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-06
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-06-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-07
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-07-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-08
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-08-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-09
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-09-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-10
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-10-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-11
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-11-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-12
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-12-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-13
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-13-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-14
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-14-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-15
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-15-not
30 bit IN FALSE hm2_7i97.0.led.CR01
30 bit IN FALSE hm2_7i97.0.led.CR02
30 bit IN FALSE hm2_7i97.0.led.CR03
30 bit IN FALSE hm2_7i97.0.led.CR04
30 bit OUT FALSE hm2_7i97.0.packet-error
30 bit OUT FALSE hm2_7i97.0.packet-error-exceeded
30 s32 OUT 0 hm2_7i97.0.packet-error-level
30 u32 I/O 0x00000000 hm2_7i97.0.packet-error-total
30 bit IN FALSE hm2_7i97.0.pwmgen.00.enable <== joint-0-enable
30 float IN 0 hm2_7i97.0.pwmgen.00.value <== joint.0.output
30 bit IN FALSE hm2_7i97.0.pwmgen.01.enable <== joint-1-enable
30 float IN 0 hm2_7i97.0.pwmgen.01.value <== joint.1.output
30 bit IN FALSE hm2_7i97.0.pwmgen.02.enable <== joint-2-enable
30 float IN 0 hm2_7i97.0.pwmgen.02.value <== joint.2.output
30 bit IN FALSE hm2_7i97.0.pwmgen.03.enable
30 float IN 0 hm2_7i97.0.pwmgen.03.value
30 bit IN FALSE hm2_7i97.0.pwmgen.04.enable
30 float IN 0 hm2_7i97.0.pwmgen.04.value
30 bit IN FALSE hm2_7i97.0.pwmgen.05.enable
30 float IN 0 hm2_7i97.0.pwmgen.05.value
30 s32 OUT 0 hm2_7i97.0.read-request.time
30 s32 OUT 69157 hm2_7i97.0.read.time
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-00
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-01
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-02
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-03
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-04
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-05
30 bit IN FALSE hm2_7i97.0.ssr.00.out-00
30 bit IN FALSE hm2_7i97.0.ssr.00.out-01
30 bit IN FALSE hm2_7i97.0.ssr.00.out-02
30 bit IN FALSE hm2_7i97.0.ssr.00.out-03
30 bit IN FALSE hm2_7i97.0.ssr.00.out-04
30 bit IN FALSE hm2_7i97.0.ssr.00.out-05
30 u32 IN 0x000F4240 hm2_7i97.0.ssr.00.rate
30 bit I/O FALSE hm2_7i97.0.watchdog.has_bit
30 s32 OUT 5328 hm2_7i97.0.write.time
48 float IN 0 ini.0.backlash
48 float IN 1 ini.0.ferror
48 float IN 0 ini.0.home
48 float IN 0 ini.0.home_offset
48 s32 IN 999 ini.0.home_sequence
48 float IN 200 ini.0.max_acceleration
48 float IN 1 ini.0.max_limit
48 float IN 200 ini.0.max_velocity
48 float IN 0.001 ini.0.min_ferror
48 float IN 0 ini.0.min_limit
48 float IN 0 ini.1.backlash
48 float IN 1 ini.1.ferror
48 float IN 0 ini.1.home
48 float IN 0 ini.1.home_offset
48 s32 IN 999 ini.1.home_sequence
48 float IN 200 ini.1.max_acceleration
48 float IN 1 ini.1.max_limit
48 float IN 200 ini.1.max_velocity
48 float IN 0.001 ini.1.min_ferror
48 float IN 0 ini.1.min_limit
48 float IN 0 ini.2.backlash
48 float IN 1 ini.2.ferror
48 float IN 0 ini.2.home
48 float IN 0 ini.2.home_offset
48 s32 IN 999 ini.2.home_sequence
48 float IN 200 ini.2.max_acceleration
48 float IN 1 ini.2.max_limit
48 float IN 200 ini.2.max_velocity
48 float IN 0.001 ini.2.min_ferror
48 float IN 0 ini.2.min_limit
48 float IN 0 ini.a.max_acceleration
48 float IN 0 ini.a.max_limit
48 float IN 0 ini.a.max_velocity
48 float IN 0 ini.a.min_limit
48 float IN 0 ini.b.max_acceleration
48 float IN 0 ini.b.max_limit
48 float IN 0 ini.b.max_velocity
48 float IN 0 ini.b.min_limit
48 float IN 0 ini.c.max_acceleration
48 float IN 0 ini.c.max_limit
48 float IN 0 ini.c.max_velocity
48 float IN 0 ini.c.min_limit
48 bit IN TRUE ini.traj_arc_blend_enable
48 bit IN FALSE ini.traj_arc_blend_fallback_enable
48 float IN 4 ini.traj_arc_blend_gap_cycles
48 s32 IN 50 ini.traj_arc_blend_optimization_depth
48 float IN 100 ini.traj_arc_blend_ramp_freq
48 float IN 0.1 ini.traj_arc_blend_tangent_kink_ratio
48 float IN 1e+99 ini.traj_default_acceleration
48 float IN 1 ini.traj_default_velocity
48 float IN 1e+99 ini.traj_max_acceleration
48 float IN 5.1 ini.traj_max_velocity
48 float IN 0 ini.u.max_acceleration
48 float IN 0 ini.u.max_limit
48 float IN 0 ini.u.max_velocity
48 float IN 0 ini.u.min_limit
48 float IN 0 ini.v.max_acceleration
48 float IN 0 ini.v.max_limit
48 float IN 0 ini.v.max_velocity
48 float IN 0 ini.v.min_limit
48 float IN 0 ini.w.max_acceleration
48 float IN 0 ini.w.max_limit
48 float IN 0 ini.w.max_velocity
48 float IN 0 ini.w.min_limit
48 float IN 200 ini.x.max_acceleration
48 float IN 1 ini.x.max_limit
48 float IN 200 ini.x.max_velocity
48 float IN 0 ini.x.min_limit
48 float IN 200 ini.y.max_acceleration
48 float IN 1 ini.y.max_limit
48 float IN 200 ini.y.max_velocity
48 float IN 0 ini.y.min_limit
48 float IN 200 ini.z.max_acceleration
48 float IN 1 ini.z.max_limit
48 float IN 200 ini.z.max_velocity
48 float IN 0 ini.z.min_limit
4 bit OUT FALSE iocontrol.0.coolant-flood
4 bit OUT FALSE iocontrol.0.coolant-mist
4 bit OUT TRUE iocontrol.0.emc-abort
4 bit IN FALSE iocontrol.0.emc-abort-ack
4 bit IN TRUE iocontrol.0.emc-enable-in <== estop-loopback
4 s32 OUT 7 iocontrol.0.emc-reason
4 bit OUT TRUE iocontrol.0.lube
4 bit IN FALSE iocontrol.0.lube_level
4 bit OUT FALSE iocontrol.0.start-change
4 bit IN FALSE iocontrol.0.start-change-ack
4 s32 OUT 4 iocontrol.0.state
4 bit OUT FALSE iocontrol.0.tool-change ==> tool-change-loop
4 bit IN FALSE iocontrol.0.tool-changed <== tool-change-loop
4 s32 OUT 0 iocontrol.0.tool-number
4 s32 OUT 0 iocontrol.0.tool-prep-index
4 s32 OUT 0 iocontrol.0.tool-prep-number
4 s32 OUT 0 iocontrol.0.tool-prep-pocket
4 bit OUT FALSE iocontrol.0.tool-prepare ==> tool-prep-loop
4 bit IN FALSE iocontrol.0.tool-prepared <== tool-prep-loop
4 bit IN FALSE iocontrol.0.toolchanger-clear-fault
4 bit IN FALSE iocontrol.0.toolchanger-fault
4 bit OUT FALSE iocontrol.0.toolchanger-fault-ack
4 bit OUT FALSE iocontrol.0.toolchanger-faulted
4 s32 IN 0 iocontrol.0.toolchanger-reason
4 bit OUT TRUE iocontrol.0.user-enable-out ==> estop-loopback
4 bit OUT FALSE iocontrol.0.user-request-enable
23 float OUT 0 joint.0.acc-cmd
23 bit OUT TRUE joint.0.active
23 bit OUT FALSE joint.0.amp-enable-out ==> joint-0-enable
23 bit IN FALSE joint.0.amp-fault-in
23 float OUT 0 joint.0.backlash-corr
23 float OUT 0 joint.0.backlash-filt
23 float OUT 0 joint.0.backlash-vel
23 float OUT 0 joint.0.coarse-pos-cmd
23 bit OUT FALSE joint.0.error
23 float OUT 0 joint.0.f-error
23 float OUT 0.001 joint.0.f-error-lim
23 bit OUT FALSE joint.0.f-errored
23 bit OUT FALSE joint.0.faulted
23 float OUT 0 joint.0.free-pos-cmd
23 bit OUT FALSE joint.0.free-tp-enable
23 float OUT 0 joint.0.free-vel-lim
23 s32 OUT 0 joint.0.home-state
23 bit IN FALSE joint.0.home-sw-in <== plus-minus-home-joint-0
23 bit OUT FALSE joint.0.homed
23 bit OUT FALSE joint.0.homing
23 bit OUT TRUE joint.0.in-position
23 bit I/O FALSE joint.0.index-enable <=> joint-0-index-enable
23 float IN 1 joint.0.jog-accel-fraction
23 s32 IN 0 joint.0.jog-counts
23 bit IN FALSE joint.0.jog-enable
23 float IN 0 joint.0.jog-scale
23 bit IN FALSE joint.0.jog-vel-mode
23 bit OUT FALSE joint.0.kb-jog-active
23 float OUT 0 joint.0.motor-offset
23 float OUT -0.001175 joint.0.motor-pos-cmd ==> joint-0-pos-cmd
23 float IN -0.001175 joint.0.motor-pos-fb <== joint-0-pos-fb
23 bit OUT FALSE joint.0.neg-hard-limit
23 bit IN FALSE joint.0.neg-lim-sw-in <== plus-minus-home-joint-0
23 float OUT -0.001175 joint.0.pos-cmd
23 float OUT -0.001175 joint.0.pos-fb
23 bit OUT FALSE joint.0.pos-hard-limit
23 bit IN FALSE joint.0.pos-lim-sw-in <== plus-minus-home-joint-0
23 float OUT 0 joint.0.vel-cmd
23 bit OUT FALSE joint.0.wheel-jog-active
23 float OUT 0 joint.1.acc-cmd
23 bit OUT TRUE joint.1.active
23 bit OUT FALSE joint.1.amp-enable-out ==> joint-1-enable
23 bit IN FALSE joint.1.amp-fault-in
23 float OUT 0 joint.1.backlash-corr
23 float OUT 0 joint.1.backlash-filt
23 float OUT 0 joint.1.backlash-vel
23 float OUT 0 joint.1.coarse-pos-cmd
23 bit OUT FALSE joint.1.error
23 float OUT 0 joint.1.f-error
23 float OUT 0.001 joint.1.f-error-lim
23 bit OUT FALSE joint.1.f-errored
23 bit OUT FALSE joint.1.faulted
23 float OUT 0 joint.1.free-pos-cmd
23 bit OUT FALSE joint.1.free-tp-enable
23 float OUT 0 joint.1.free-vel-lim
23 s32 OUT 0 joint.1.home-state
23 bit IN FALSE joint.1.home-sw-in <== minus-home-joint-1
23 bit OUT FALSE joint.1.homed
23 bit OUT FALSE joint.1.homing
23 bit OUT TRUE joint.1.in-position
23 bit I/O FALSE joint.1.index-enable <=> joint-1-index-enable
23 float IN 1 joint.1.jog-accel-fraction
23 s32 IN 0 joint.1.jog-counts
23 bit IN FALSE joint.1.jog-enable
23 float IN 0 joint.1.jog-scale
23 bit IN FALSE joint.1.jog-vel-mode
23 bit OUT FALSE joint.1.kb-jog-active
23 float OUT 0 joint.1.motor-offset
23 float OUT 0 joint.1.motor-pos-cmd ==> joint-1-pos-cmd
23 float IN 0 joint.1.motor-pos-fb <== joint-1-pos-fb
23 bit OUT FALSE joint.1.neg-hard-limit
23 bit IN FALSE joint.1.neg-lim-sw-in <== minus-home-joint-1
23 float OUT 0 joint.1.pos-cmd
23 float OUT 0 joint.1.pos-fb
23 bit OUT FALSE joint.1.pos-hard-limit
23 bit IN FALSE joint.1.pos-lim-sw-in <== pos-limit-joint-1
23 float OUT 0 joint.1.vel-cmd
23 bit OUT FALSE joint.1.wheel-jog-active
23 float OUT 0 joint.2.acc-cmd
23 bit OUT TRUE joint.2.active
23 bit OUT FALSE joint.2.amp-enable-out ==> joint-2-enable
23 bit IN FALSE joint.2.amp-fault-in
23 float OUT 0 joint.2.backlash-corr
23 float OUT 0 joint.2.backlash-filt
23 float OUT 0 joint.2.backlash-vel
23 float OUT 0 joint.2.coarse-pos-cmd
23 bit OUT FALSE joint.2.error
23 float OUT 0 joint.2.f-error
23 float OUT 0.001 joint.2.f-error-lim
23 bit OUT FALSE joint.2.f-errored
23 bit OUT FALSE joint.2.faulted
23 float OUT 0 joint.2.free-pos-cmd
23 bit OUT FALSE joint.2.free-tp-enable
23 float OUT 0 joint.2.free-vel-lim
23 s32 OUT 0 joint.2.home-state
23 bit IN FALSE joint.2.home-sw-in <== plus-home-joint-2
23 bit OUT FALSE joint.2.homed
23 bit OUT FALSE joint.2.homing
23 bit OUT TRUE joint.2.in-position
23 bit I/O FALSE joint.2.index-enable <=> joint-2-index-enable
23 float IN 1 joint.2.jog-accel-fraction
23 s32 IN 0 joint.2.jog-counts
23 bit IN FALSE joint.2.jog-enable
23 float IN 0 joint.2.jog-scale
23 bit IN FALSE joint.2.jog-vel-mode
23 bit OUT FALSE joint.2.kb-jog-active
23 float OUT 0 joint.2.motor-offset
23 float OUT 0 joint.2.motor-pos-cmd ==> joint-2-pos-cmd
23 float IN 0 joint.2.motor-pos-fb <== joint-2-pos-fb
23 bit OUT FALSE joint.2.neg-hard-limit
23 bit IN FALSE joint.2.neg-lim-sw-in <== neg-limit-joint-2
23 float OUT 0 joint.2.pos-cmd
23 float OUT 0 joint.2.pos-fb
23 bit OUT FALSE joint.2.pos-hard-limit
23 bit IN FALSE joint.2.pos-lim-sw-in <== plus-home-joint-2
23 float OUT 0 joint.2.vel-cmd
23 bit OUT FALSE joint.2.wheel-jog-active
23 s32 OUT 82 motion-command-handler.time
23 s32 OUT 1598 motion-controller.time
23 float IN 1 motion.adaptive-feed
23 float IN 0 motion.analog-in-00
23 float IN 0 motion.analog-in-01
23 float IN 0 motion.analog-in-02
23 float IN 0 motion.analog-in-03
23 float OUT 0 motion.analog-out-00
23 float OUT 0 motion.analog-out-01
23 float OUT 0 motion.analog-out-02
23 float OUT 0 motion.analog-out-03
23 bit OUT FALSE motion.coord-error
23 bit OUT FALSE motion.coord-mode
23 float OUT 0 motion.current-vel
23 bit IN FALSE motion.digital-in-00
23 bit IN FALSE motion.digital-in-01
23 bit IN FALSE motion.digital-in-02
23 bit IN FALSE motion.digital-in-03
23 bit OUT FALSE motion.digital-out-00
23 bit OUT FALSE motion.digital-out-01
23 bit OUT FALSE motion.digital-out-02
23 bit OUT FALSE motion.digital-out-03
23 float OUT 0 motion.distance-to-go
23 bit IN TRUE motion.enable
23 bit OUT FALSE motion.eoffset-active
23 bit OUT FALSE motion.eoffset-limited
23 bit IN FALSE motion.feed-hold
23 float OUT 0 motion.feed-inches-per-minute
23 float OUT 0 motion.feed-inches-per-second
23 bit IN FALSE motion.feed-inhibit
23 float OUT 0 motion.feed-mm-per-minute
23 float OUT 0 motion.feed-mm-per-second
23 float OUT 0 motion.feed-upm
23 bit IN FALSE motion.homing-inhibit
23 bit OUT TRUE motion.in-position
23 bit OUT FALSE motion.is-all-homed
23 bit IN FALSE motion.jog-inhibit
23 bit OUT FALSE motion.jog-is-active
23 bit IN FALSE motion.jog-stop
23 bit IN FALSE motion.jog-stop-immediate
23 bit OUT FALSE motion.motion-enabled ==> motion-enable
23 s32 OUT 0 motion.motion-type
23 bit OUT FALSE motion.on-soft-limit
23 bit IN FALSE motion.probe-input
23 s32 OUT 0 motion.program-line
23 float OUT 0 motion.requested-vel
23 u32 OUT 0x000C33E2 motion.servo.last-period
23 bit OUT FALSE motion.teleop-mode
23 float OUT 0 motion.tooloffset.a
23 float OUT 0 motion.tooloffset.b
23 float OUT 0 motion.tooloffset.c
23 float OUT 0 motion.tooloffset.u
23 float OUT 0 motion.tooloffset.v
23 float OUT 0 motion.tooloffset.w
23 float OUT 0 motion.tooloffset.x
23 float OUT 0 motion.tooloffset.y
23 float OUT 0 motion.tooloffset.z
23 bit OUT FALSE motion.tp-reverse
33 float IN 0 pid.x.Dgain
33 float IN 0 pid.x.FF0
33 float IN 0 pid.x.FF1
33 float IN 0 pid.x.FF2
33 float IN 0 pid.x.FF3
33 float IN 0 pid.x.Igain
33 float IN 1 pid.x.Pgain
33 float IN 0 pid.x.bias
33 float IN -0.001175 pid.x.command <== joint-0-pos-cmd
33 float IN 0 pid.x.command-deriv
33 float IN 0 pid.x.deadband
33 s32 OUT 93 pid.x.do-pid-calcs.time
33 bit IN FALSE pid.x.enable <== joint-0-enable
33 float OUT 0 pid.x.error
33 bit IN TRUE pid.x.error-previous-target
33 float IN -0.001175 pid.x.feedback <== joint-0-pos-fb
33 float IN 0 pid.x.feedback-deriv
33 bit IN FALSE pid.x.index-enable <== joint-0-index-enable
33 float IN 0 pid.x.maxcmdD
33 float IN 0 pid.x.maxcmdDD
33 float IN 0 pid.x.maxcmdDDD
33 float IN 0 pid.x.maxerror
33 float IN 0 pid.x.maxerrorD
33 float IN 0 pid.x.maxerrorI
33 float IN 10 pid.x.maxoutput
33 float OUT 0 pid.x.output ==> joint.0.output
33 bit OUT FALSE pid.x.saturated
33 s32 OUT 0 pid.x.saturated-count
33 float OUT 0 pid.x.saturated-s
33 u32 I/O 0x00000032 pid.x.tune-cycles
33 float I/O 0.5 pid.x.tune-effort
33 bit IN FALSE pid.x.tune-mode
33 bit I/O FALSE pid.x.tune-start
33 u32 I/O 0x00000000 pid.x.tune-type
33 float IN 0 pid.y.Dgain
33 float IN 0 pid.y.FF0
33 float IN 0 pid.y.FF1
33 float IN 0 pid.y.FF2
33 float IN 0 pid.y.FF3
33 float IN 0 pid.y.Igain
33 float IN 1 pid.y.Pgain
33 float IN 0 pid.y.bias
33 float IN 0 pid.y.command <== joint-1-pos-cmd
33 float IN 0 pid.y.command-deriv
33 float IN 0 pid.y.deadband
33 s32 OUT 23 pid.y.do-pid-calcs.time
33 bit IN FALSE pid.y.enable <== joint-1-enable
33 float OUT 0 pid.y.error
33 bit IN TRUE pid.y.error-previous-target
33 float IN 0 pid.y.feedback <== joint-1-pos-fb
33 float IN 0 pid.y.feedback-deriv
33 bit IN FALSE pid.y.index-enable <== joint-1-index-enable
33 float IN 0 pid.y.maxcmdD
33 float IN 0 pid.y.maxcmdDD
33 float IN 0 pid.y.maxcmdDDD
33 float IN 0 pid.y.maxerror
33 float IN 0 pid.y.maxerrorD
33 float IN 0 pid.y.maxerrorI
33 float IN 10 pid.y.maxoutput
33 float OUT 0 pid.y.output ==> joint.1.output
33 bit OUT FALSE pid.y.saturated
33 s32 OUT 0 pid.y.saturated-count
33 float OUT 0 pid.y.saturated-s
33 u32 I/O 0x00000032 pid.y.tune-cycles
33 float I/O 0.5 pid.y.tune-effort
33 bit IN FALSE pid.y.tune-mode
33 bit I/O FALSE pid.y.tune-start
33 u32 I/O 0x00000000 pid.y.tune-type
33 float IN 0 pid.z.Dgain
33 float IN 0 pid.z.FF0
33 float IN 0 pid.z.FF1
33 float IN 0 pid.z.FF2
33 float IN 0 pid.z.FF3
33 float IN 0 pid.z.Igain
33 float IN 1 pid.z.Pgain
33 float IN 0 pid.z.bias
33 float IN 0 pid.z.command <== joint-2-pos-cmd
33 float IN 0 pid.z.command-deriv
33 float IN 0 pid.z.deadband
33 s32 OUT 35 pid.z.do-pid-calcs.time
33 bit IN FALSE pid.z.enable <== joint-2-enable
33 float OUT 0 pid.z.error
33 bit IN TRUE pid.z.error-previous-target
33 float IN 0 pid.z.feedback <== joint-2-pos-fb
33 float IN 0 pid.z.feedback-deriv
33 bit IN FALSE pid.z.index-enable <== joint-2-index-enable
33 float IN 0 pid.z.maxcmdD
33 float IN 0 pid.z.maxcmdDD
33 float IN 0 pid.z.maxcmdDDD
33 float IN 0 pid.z.maxerror
33 float IN 0 pid.z.maxerrorD
33 float IN 0 pid.z.maxerrorI
33 float IN 10 pid.z.maxoutput
33 float OUT 0 pid.z.output ==> joint.2.output
33 bit OUT FALSE pid.z.saturated
33 s32 OUT 0 pid.z.saturated-count
33 float OUT 0 pid.z.saturated-s
33 u32 I/O 0x00000032 pid.z.tune-cycles
33 float I/O 0.5 pid.z.tune-effort
33 bit IN FALSE pid.z.tune-mode
33 bit I/O FALSE pid.z.tune-start
33 u32 I/O 0x00000000 pid.z.tune-type
24 s32 OUT 69422 servo-thread.time
23 bit IN FALSE spindle.0.amp-fault-in
23 bit IN TRUE spindle.0.at-speed
23 bit OUT TRUE spindle.0.brake
23 bit OUT FALSE spindle.0.forward
23 bit I/O FALSE spindle.0.index-enable
23 bit IN FALSE spindle.0.inhibit
23 bit IN FALSE spindle.0.is-oriented
23 bit OUT FALSE spindle.0.locked
23 bit OUT FALSE spindle.0.on
23 bit OUT FALSE spindle.0.orient
23 float OUT 0 spindle.0.orient-angle
23 s32 IN 0 spindle.0.orient-fault
23 s32 OUT 0 spindle.0.orient-mode
23 bit OUT FALSE spindle.0.reverse
23 float IN 0 spindle.0.revs
23 float OUT 0 spindle.0.speed-cmd-rps
23 float IN 0 spindle.0.speed-in
23 float OUT 0 spindle.0.speed-out
23 float OUT 0 spindle.0.speed-out-abs
23 float OUT 0 spindle.0.speed-out-rps
23 float OUT 0 spindle.0.speed-out-rps-abs
Pin Aliases:
Alias Original Name
Signals:
Type Value Name (linked to)
bit TRUE estop-loopback
==> iocontrol.0.emc-enable-in
<== iocontrol.0.user-enable-out
bit FALSE joint-0-enable
==> hm2_7i97.0.pwmgen.00.enable
<== joint.0.amp-enable-out
==> pid.x.enable
bit FALSE joint-0-index-enable
<=> hm2_7i97.0.encoder.00.index-enable
<=> joint.0.index-enable
==> pid.x.index-enable
float -0.001175 joint-0-pos-cmd
<== joint.0.motor-pos-cmd
==> pid.x.command
float -0.001175 joint-0-pos-fb
<== hm2_7i97.0.encoder.00.position
==> joint.0.motor-pos-fb
==> pid.x.feedback
bit FALSE joint-1-enable
==> hm2_7i97.0.pwmgen.01.enable
<== joint.1.amp-enable-out
==> pid.y.enable
bit FALSE joint-1-index-enable
<=> hm2_7i97.0.encoder.01.index-enable
<=> joint.1.index-enable
==> pid.y.index-enable
float 0 joint-1-pos-cmd
<== joint.1.motor-pos-cmd
==> pid.y.command
float 0 joint-1-pos-fb
<== hm2_7i97.0.encoder.01.position
==> joint.1.motor-pos-fb
==> pid.y.feedback
bit FALSE joint-2-enable
==> hm2_7i97.0.pwmgen.02.enable
<== joint.2.amp-enable-out
==> pid.z.enable
bit FALSE joint-2-index-enable
<=> hm2_7i97.0.encoder.02.index-enable
<=> joint.2.index-enable
==> pid.z.index-enable
float 0 joint-2-pos-cmd
<== joint.2.motor-pos-cmd
==> pid.z.command
float 0 joint-2-pos-fb
<== hm2_7i97.0.encoder.02.position
==> joint.2.motor-pos-fb
==> pid.z.feedback
float 0 joint.0.output
==> hm2_7i97.0.pwmgen.00.value
<== pid.x.output
float 0 joint.1.output
==> hm2_7i97.0.pwmgen.01.value
<== pid.y.output
float 0 joint.2.output
==> hm2_7i97.0.pwmgen.02.value
<== pid.z.output
bit FALSE minus-home-joint-1
<== hm2_7i97.0.inmux.00.input-01-not
==> joint.1.home-sw-in
==> joint.1.neg-lim-sw-in
bit FALSE motion-enable
<== motion.motion-enabled
bit FALSE neg-limit-joint-2
<== hm2_7i97.0.inmux.00.input-04-not
==> joint.2.neg-lim-sw-in
bit FALSE plus-home-joint-2
<== hm2_7i97.0.inmux.00.input-03-not
==> joint.2.home-sw-in
==> joint.2.pos-lim-sw-in
bit FALSE plus-minus-home-joint-0
<== hm2_7i97.0.inmux.00.input-00-not
==> joint.0.home-sw-in
==> joint.0.neg-lim-sw-in
==> joint.0.pos-lim-sw-in
bit FALSE pos-limit-joint-1
<== hm2_7i97.0.inmux.00.input-02-not
==> joint.1.pos-lim-sw-in
bit FALSE tool-change-confirmed
<== hal_manualtoolchange.changed
bit FALSE tool-change-loop
<== iocontrol.0.tool-change
==> iocontrol.0.tool-changed
bit FALSE tool-change-request
==> hal_manualtoolchange.change
s32 0 tool-number
==> hal_manualtoolchange.number
bit FALSE tool-prep-loop
<== iocontrol.0.tool-prepare
==> iocontrol.0.tool-prepared
Parameters:
Owner Type Dir Value Name
30 bit RW FALSE hm2_7i97.0.encoder.00.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.00.filter
30 bit RW FALSE hm2_7i97.0.encoder.00.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.00.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.00.index-mask-invert
30 float RW 40000 hm2_7i97.0.encoder.00.scale
30 bit RW FALSE hm2_7i97.0.encoder.00.sel0.invert_output
30 bit RW FALSE hm2_7i97.0.encoder.00.sel0.is_opendrain
30 float RW 0.5 hm2_7i97.0.encoder.00.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.01.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.01.filter
30 bit RW FALSE hm2_7i97.0.encoder.01.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.01.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.01.index-mask-invert
30 float RW 40000 hm2_7i97.0.encoder.01.scale
30 float RW 0.5 hm2_7i97.0.encoder.01.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.02.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.02.filter
30 bit RW FALSE hm2_7i97.0.encoder.02.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.02.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.02.index-mask-invert
30 float RW 40000 hm2_7i97.0.encoder.02.scale
30 float RW 0.5 hm2_7i97.0.encoder.02.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.03.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.03.filter
30 bit RW FALSE hm2_7i97.0.encoder.03.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.03.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.03.index-mask-invert
30 float RW 1 hm2_7i97.0.encoder.03.scale
30 float RW 0.5 hm2_7i97.0.encoder.03.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.04.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.04.filter
30 bit RW FALSE hm2_7i97.0.encoder.04.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.04.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.04.index-mask-invert
30 float RW 1 hm2_7i97.0.encoder.04.scale
30 float RW 0.5 hm2_7i97.0.encoder.04.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.05.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.05.filter
30 bit RW FALSE hm2_7i97.0.encoder.05.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.05.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.05.index-mask-invert
30 float RW 1 hm2_7i97.0.encoder.05.scale
30 float RW 0.5 hm2_7i97.0.encoder.05.vel-timeout
30 bit RW FALSE hm2_7i97.0.gpio.019.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.019.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.020.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.020.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.021.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.021.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.022.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.022.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.023.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.023.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.024.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.024.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.025.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.025.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.026.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.026.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.027.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.027.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.028.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.028.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.029.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.029.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.031.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.031.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.031.is_output
30 bit RW FALSE hm2_7i97.0.gpio.032.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.032.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.032.is_output
30 bit RW FALSE hm2_7i97.0.gpio.033.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.033.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.033.is_output
30 bit RW FALSE hm2_7i97.0.gpio.034.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.034.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.034.is_output
30 bit RW FALSE hm2_7i97.0.gpio.035.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.035.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.035.is_output
30 bit RW FALSE hm2_7i97.0.gpio.036.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.036.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.036.is_output
30 bit RW FALSE hm2_7i97.0.gpio.037.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.037.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.037.is_output
30 bit RW FALSE hm2_7i97.0.gpio.038.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.038.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.038.is_output
30 bit RW FALSE hm2_7i97.0.gpio.039.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.039.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.039.is_output
30 bit RW FALSE hm2_7i97.0.gpio.040.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.040.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.040.is_output
30 bit RW FALSE hm2_7i97.0.gpio.041.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.041.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.041.is_output
30 bit RW FALSE hm2_7i97.0.gpio.042.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.042.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.042.is_output
30 bit RW FALSE hm2_7i97.0.gpio.043.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.043.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.043.is_output
30 bit RW FALSE hm2_7i97.0.gpio.044.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.044.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.044.is_output
30 bit RW FALSE hm2_7i97.0.gpio.045.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.045.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.045.is_output
30 bit RW FALSE hm2_7i97.0.gpio.046.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.046.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.046.is_output
30 bit RW FALSE hm2_7i97.0.gpio.047.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.047.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.047.is_output
30 bit RW FALSE hm2_7i97.0.gpio.048.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.048.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.048.is_output
30 bit RW FALSE hm2_7i97.0.gpio.049.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.049.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.049.is_output
30 bit RW FALSE hm2_7i97.0.gpio.050.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.050.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.050.is_output
30 bit RW FALSE hm2_7i97.0.inmux.00.enc0_4xmode
30 bit RW FALSE hm2_7i97.0.inmux.00.enc1_4xmode
30 bit RW FALSE hm2_7i97.0.inmux.00.enc2_4xmode
30 bit RW FALSE hm2_7i97.0.inmux.00.enc3_4xmode
30 u32 RW 0x00000005 hm2_7i97.0.inmux.00.fast_scans
30 u32 RW 0x00004E20 hm2_7i97.0.inmux.00.scan_rate
30 u32 RO 0x00000010 hm2_7i97.0.inmux.00.scan_width
30 u32 RW 0x000001F4 hm2_7i97.0.inmux.00.slow_scans
30 bit RW FALSE hm2_7i97.0.io_error
30 s32 RO 1 hm2_7i97.0.packet-error-decrement
30 s32 RW 2 hm2_7i97.0.packet-error-increment
30 s32 RW 10 hm2_7i97.0.packet-error-limit
30 s32 RW 80 hm2_7i97.0.packet-read-timeout
30 bit RW TRUE hm2_7i97.0.pwmgen.00.dither
30 bit RW FALSE hm2_7i97.0.pwmgen.00.enable.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.00.enable.is_opendrain
30 bit RW TRUE hm2_7i97.0.pwmgen.00.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.00.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.00.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.00.output-type
30 float RW 40000 hm2_7i97.0.pwmgen.00.scale
30 bit RW TRUE hm2_7i97.0.pwmgen.01.dither
30 bit RW TRUE hm2_7i97.0.pwmgen.01.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.01.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.01.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.01.output-type
30 float RW 40000 hm2_7i97.0.pwmgen.01.scale
30 bit RW TRUE hm2_7i97.0.pwmgen.02.dither
30 bit RW TRUE hm2_7i97.0.pwmgen.02.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.02.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.02.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.02.output-type
30 float RW 40000 hm2_7i97.0.pwmgen.02.scale
30 bit RW FALSE hm2_7i97.0.pwmgen.03.dither
30 bit RW FALSE hm2_7i97.0.pwmgen.03.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.03.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.03.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.03.output-type
30 float RW 1 hm2_7i97.0.pwmgen.03.scale
30 bit RW FALSE hm2_7i97.0.pwmgen.04.dither
30 bit RW FALSE hm2_7i97.0.pwmgen.04.enable.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.04.enable.is_opendrain
30 bit RW FALSE hm2_7i97.0.pwmgen.04.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.04.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.04.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.04.output-type
30 float RW 1 hm2_7i97.0.pwmgen.04.scale
30 bit RW FALSE hm2_7i97.0.pwmgen.05.dither
30 bit RW FALSE hm2_7i97.0.pwmgen.05.enable.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.05.enable.is_opendrain
30 bit RW FALSE hm2_7i97.0.pwmgen.05.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.05.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.05.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.05.output-type
30 float RW 1 hm2_7i97.0.pwmgen.05.scale
30 u32 RW 0x00004E20 hm2_7i97.0.pwmgen.pdm_frequency
30 u32 RW 0x000124F8 hm2_7i97.0.pwmgen.pwm_frequency
30 s32 RW 0 hm2_7i97.0.read-request.tmax
30 bit RO FALSE hm2_7i97.0.read-request.tmax-increased
30 s32 RW 143945 hm2_7i97.0.read.tmax
30 bit RO FALSE hm2_7i97.0.read.tmax-increased
30 u32 RW 0x004C4B40 hm2_7i97.0.watchdog.timeout_ns
30 s32 RW 24505 hm2_7i97.0.write.tmax
30 bit RO FALSE hm2_7i97.0.write.tmax-increased
23 s32 RW 4011 motion-command-handler.tmax
23 bit RO FALSE motion-command-handler.tmax-increased
23 s32 RW 24322 motion-controller.tmax
23 bit RO FALSE motion-controller.tmax-increased
23 bit RO FALSE motion.debug-bit-0
23 bit RO FALSE motion.debug-bit-1
23 float RO 0 motion.debug-float-0
23 float RO 0 motion.debug-float-1
23 float RO 0 motion.debug-float-2
23 float RO 1 motion.debug-float-3
23 s32 RO 0 motion.debug-s32-0
23 s32 RO 0 motion.debug-s32-1
33 s32 RW 4618 pid.x.do-pid-calcs.tmax
33 bit RO FALSE pid.x.do-pid-calcs.tmax-increased
33 s32 RW 2554 pid.y.do-pid-calcs.tmax
33 bit RO FALSE pid.y.do-pid-calcs.tmax-increased
33 s32 RW 2090 pid.z.do-pid-calcs.tmax
33 bit RO FALSE pid.z.do-pid-calcs.tmax-increased
24 s32 RW 168007 servo-thread.tmax
23 float RO 0 tc.0.acc
23 float RO 0 tc.0.pos
23 float RO 0 tc.0.vel
23 float RO 0 tc.1.acc
23 float RO 0 tc.1.pos
23 float RO 0 tc.1.vel
23 float RO 0 tc.2.acc
23 float RO 0 tc.2.pos
23 float RO 0 tc.2.vel
23 float RO 0 tc.3.acc
23 float RO 0 tc.3.pos
23 float RO 0 tc.3.vel
23 u32 RO 0x00000000 traj.active_tc
23 float RO 0 traj.pos_out
23 float RO 0 traj.vel_out
Parameter Aliases:
Alias Original Name
hm2_7i97.0.encoder.00.sel0.invert_output hm2_7i97.0.gpio.018.invert_output
hm2_7i97.0.encoder.00.sel0.is_opendrain hm2_7i97.0.gpio.018.is_opendrain
hm2_7i97.0.pwmgen.00.enable.invert_output hm2_7i97.0.gpio.008.invert_output
hm2_7i97.0.pwmgen.00.enable.is_opendrain hm2_7i97.0.gpio.008.is_opendrain
hm2_7i97.0.pwmgen.00.out0.invert_output hm2_7i97.0.gpio.000.invert_output
hm2_7i97.0.pwmgen.00.out0.is_opendrain hm2_7i97.0.gpio.000.is_opendrain
hm2_7i97.0.pwmgen.01.out0.invert_output hm2_7i97.0.gpio.001.invert_output
hm2_7i97.0.pwmgen.01.out0.is_opendrain hm2_7i97.0.gpio.001.is_opendrain
hm2_7i97.0.pwmgen.02.out0.invert_output hm2_7i97.0.gpio.002.invert_output
hm2_7i97.0.pwmgen.02.out0.is_opendrain hm2_7i97.0.gpio.002.is_opendrain
hm2_7i97.0.pwmgen.03.out0.invert_output hm2_7i97.0.gpio.003.invert_output
hm2_7i97.0.pwmgen.03.out0.is_opendrain hm2_7i97.0.gpio.003.is_opendrain
hm2_7i97.0.pwmgen.04.enable.invert_output hm2_7i97.0.gpio.005.invert_output
hm2_7i97.0.pwmgen.04.enable.is_opendrain hm2_7i97.0.gpio.005.is_opendrain
hm2_7i97.0.pwmgen.04.out0.invert_output hm2_7i97.0.gpio.004.invert_output
hm2_7i97.0.pwmgen.04.out0.is_opendrain hm2_7i97.0.gpio.004.is_opendrain
hm2_7i97.0.pwmgen.05.enable.invert_output hm2_7i97.0.gpio.007.invert_output
hm2_7i97.0.pwmgen.05.enable.is_opendrain hm2_7i97.0.gpio.007.is_opendrain
hm2_7i97.0.pwmgen.05.out0.invert_output hm2_7i97.0.gpio.006.invert_output
hm2_7i97.0.pwmgen.05.out0.is_opendrain hm2_7i97.0.gpio.006.is_opendrain
Exported Functions:
Owner CodeAddr Arg FP Users Name
00030 7f454f271908 558d598d2b10 YES 1 hm2_7i97.0.read
00030 7f454f271891 558d598d2b10 YES 0 hm2_7i97.0.read-request
00030 7f454f271749 558d598d2b10 YES 1 hm2_7i97.0.write
00023 7f454f3b73ad 00000000 YES 1 motion-command-handler
00023 7f454f3b79a0 00000000 YES 1 motion-controller
00033 7f454f258240 7f454f6633f0 YES 1 pid.x.do-pid-calcs
00033 7f454f258240 7f454f663590 YES 1 pid.y.do-pid-calcs
00033 7f454f258240 7f454f663730 YES 1 pid.z.do-pid-calcs
Realtime Threads:
Period FP Name ( Time, Max-Time )
1000000 YES servo-thread ( 70409, 168007 )
1 hm2_7i97.0.read
2 motion-command-handler
3 motion-controller
4 pid.x.do-pid-calcs
5 pid.y.do-pid-calcs
6 pid.z.do-pid-calcs
7 hm2_7i97.0.write
kris@mill:~$ all,txt
bash: all,txt: command not found
kris@mill:~$ > all,txt
kris@mill:~$
30 bit OUT FALSE hm2_7i97.0.gpio.024.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.025.in
30 bit OUT FALSE hm2_7i97.0.gpio.025.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.026.in
30 bit OUT FALSE hm2_7i97.0.gpio.026.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.027.in
30 bit OUT FALSE hm2_7i97.0.gpio.027.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.028.in
30 bit OUT FALSE hm2_7i97.0.gpio.028.in_not
30 bit OUT FALSE hm2_7i97.0.gpio.029.in
30 bit OUT TRUE hm2_7i97.0.gpio.029.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.030.in
30 bit OUT FALSE hm2_7i97.0.gpio.030.in_not
30 bit OUT TRUE hm2_7i97.0.gpio.031.in
30 bit OUT FALSE hm2_7i97.0.gpio.031.in_not
30 bit IN FALSE hm2_7i97.0.gpio.031.out
30 bit OUT FALSE hm2_7i97.0.gpio.032.in
30 bit OUT TRUE hm2_7i97.0.gpio.032.in_not
30 bit IN FALSE hm2_7i97.0.gpio.032.out
30 bit OUT TRUE hm2_7i97.0.gpio.033.in
30 bit OUT FALSE hm2_7i97.0.gpio.033.in_not
30 bit IN FALSE hm2_7i97.0.gpio.033.out
30 bit OUT TRUE hm2_7i97.0.gpio.034.in
30 bit OUT FALSE hm2_7i97.0.gpio.034.in_not
30 bit IN FALSE hm2_7i97.0.gpio.034.out
30 bit OUT TRUE hm2_7i97.0.gpio.035.in
30 bit OUT FALSE hm2_7i97.0.gpio.035.in_not
30 bit IN FALSE hm2_7i97.0.gpio.035.out
30 bit OUT TRUE hm2_7i97.0.gpio.036.in
30 bit OUT FALSE hm2_7i97.0.gpio.036.in_not
30 bit IN FALSE hm2_7i97.0.gpio.036.out
30 bit OUT TRUE hm2_7i97.0.gpio.037.in
30 bit OUT FALSE hm2_7i97.0.gpio.037.in_not
30 bit IN FALSE hm2_7i97.0.gpio.037.out
30 bit OUT TRUE hm2_7i97.0.gpio.038.in
30 bit OUT FALSE hm2_7i97.0.gpio.038.in_not
30 bit IN FALSE hm2_7i97.0.gpio.038.out
30 bit OUT TRUE hm2_7i97.0.gpio.039.in
30 bit OUT FALSE hm2_7i97.0.gpio.039.in_not
30 bit IN FALSE hm2_7i97.0.gpio.039.out
30 bit OUT TRUE hm2_7i97.0.gpio.040.in
30 bit OUT FALSE hm2_7i97.0.gpio.040.in_not
30 bit IN FALSE hm2_7i97.0.gpio.040.out
30 bit OUT TRUE hm2_7i97.0.gpio.041.in
30 bit OUT FALSE hm2_7i97.0.gpio.041.in_not
30 bit IN FALSE hm2_7i97.0.gpio.041.out
30 bit OUT TRUE hm2_7i97.0.gpio.042.in
30 bit OUT FALSE hm2_7i97.0.gpio.042.in_not
30 bit IN FALSE hm2_7i97.0.gpio.042.out
30 bit OUT TRUE hm2_7i97.0.gpio.043.in
30 bit OUT FALSE hm2_7i97.0.gpio.043.in_not
30 bit IN FALSE hm2_7i97.0.gpio.043.out
30 bit OUT TRUE hm2_7i97.0.gpio.044.in
30 bit OUT FALSE hm2_7i97.0.gpio.044.in_not
30 bit IN FALSE hm2_7i97.0.gpio.044.out
30 bit OUT TRUE hm2_7i97.0.gpio.045.in
30 bit OUT FALSE hm2_7i97.0.gpio.045.in_not
30 bit IN FALSE hm2_7i97.0.gpio.045.out
30 bit OUT TRUE hm2_7i97.0.gpio.046.in
30 bit OUT FALSE hm2_7i97.0.gpio.046.in_not
30 bit IN FALSE hm2_7i97.0.gpio.046.out
30 bit OUT TRUE hm2_7i97.0.gpio.047.in
30 bit OUT FALSE hm2_7i97.0.gpio.047.in_not
30 bit IN FALSE hm2_7i97.0.gpio.047.out
30 bit OUT TRUE hm2_7i97.0.gpio.048.in
30 bit OUT FALSE hm2_7i97.0.gpio.048.in_not
30 bit IN FALSE hm2_7i97.0.gpio.048.out
30 bit OUT TRUE hm2_7i97.0.gpio.049.in
30 bit OUT FALSE hm2_7i97.0.gpio.049.in_not
30 bit IN FALSE hm2_7i97.0.gpio.049.out
30 bit OUT TRUE hm2_7i97.0.gpio.050.in
30 bit OUT FALSE hm2_7i97.0.gpio.050.in_not
30 bit IN FALSE hm2_7i97.0.gpio.050.out
30 s32 OUT 1 hm2_7i97.0.inmux.00.enc0-count
30 bit IN FALSE hm2_7i97.0.inmux.00.enc0-reset
30 s32 OUT 1 hm2_7i97.0.inmux.00.enc1-count
30 bit IN FALSE hm2_7i97.0.inmux.00.enc1-reset
30 s32 OUT 0 hm2_7i97.0.inmux.00.enc2-count
30 bit IN FALSE hm2_7i97.0.inmux.00.enc2-reset
30 s32 OUT 0 hm2_7i97.0.inmux.00.enc3-count
30 bit IN FALSE hm2_7i97.0.inmux.00.enc3-reset
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-00
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-00-not ==> plus-minus-home-joint-0
30 bit IN FALSE hm2_7i97.0.inmux.00.input-00-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-01
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-01-not ==> minus-home-joint-1
30 bit IN FALSE hm2_7i97.0.inmux.00.input-01-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-02
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-02-not ==> pos-limit-joint-1
30 bit IN FALSE hm2_7i97.0.inmux.00.input-02-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-03
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-03-not ==> plus-home-joint-2
30 bit IN FALSE hm2_7i97.0.inmux.00.input-03-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-04
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-04-not ==> neg-limit-joint-2
30 bit IN FALSE hm2_7i97.0.inmux.00.input-04-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-05
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-05-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-05-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-06
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-06-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-06-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-07
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-07-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-07-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-08
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-08-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-08-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-09
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-09-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-09-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-10
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-10-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-10-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-11
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-11-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-11-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-12
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-12-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-12-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-13
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-13-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-13-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-14
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-14-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-14-slow
30 bit OUT FALSE hm2_7i97.0.inmux.00.input-15
30 bit OUT TRUE hm2_7i97.0.inmux.00.input-15-not
30 bit IN FALSE hm2_7i97.0.inmux.00.input-15-slow
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-00
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-00-not
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-01
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-01-not
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-02
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-02-not
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-03
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-03-not
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-04
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-04-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-05
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-05-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-06
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-06-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-07
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-07-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-08
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-08-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-09
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-09-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-10
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-10-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-11
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-11-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-12
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-12-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-13
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-13-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-14
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-14-not
30 bit OUT FALSE hm2_7i97.0.inmux.00.raw-input-15
30 bit OUT TRUE hm2_7i97.0.inmux.00.raw-input-15-not
30 bit IN FALSE hm2_7i97.0.led.CR01
30 bit IN FALSE hm2_7i97.0.led.CR02
30 bit IN FALSE hm2_7i97.0.led.CR03
30 bit IN FALSE hm2_7i97.0.led.CR04
30 bit OUT FALSE hm2_7i97.0.packet-error
30 bit OUT FALSE hm2_7i97.0.packet-error-exceeded
30 s32 OUT 0 hm2_7i97.0.packet-error-level
30 u32 I/O 0x00000000 hm2_7i97.0.packet-error-total
30 bit IN FALSE hm2_7i97.0.pwmgen.00.enable <== joint-0-enable
30 float IN 0 hm2_7i97.0.pwmgen.00.value <== joint.0.output
30 bit IN FALSE hm2_7i97.0.pwmgen.01.enable <== joint-1-enable
30 float IN 0 hm2_7i97.0.pwmgen.01.value <== joint.1.output
30 bit IN FALSE hm2_7i97.0.pwmgen.02.enable <== joint-2-enable
30 float IN 0 hm2_7i97.0.pwmgen.02.value <== joint.2.output
30 bit IN FALSE hm2_7i97.0.pwmgen.03.enable
30 float IN 0 hm2_7i97.0.pwmgen.03.value
30 bit IN FALSE hm2_7i97.0.pwmgen.04.enable
30 float IN 0 hm2_7i97.0.pwmgen.04.value
30 bit IN FALSE hm2_7i97.0.pwmgen.05.enable
30 float IN 0 hm2_7i97.0.pwmgen.05.value
30 s32 OUT 0 hm2_7i97.0.read-request.time
30 s32 OUT 69157 hm2_7i97.0.read.time
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-00
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-01
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-02
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-03
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-04
30 bit IN FALSE hm2_7i97.0.ssr.00.invert-05
30 bit IN FALSE hm2_7i97.0.ssr.00.out-00
30 bit IN FALSE hm2_7i97.0.ssr.00.out-01
30 bit IN FALSE hm2_7i97.0.ssr.00.out-02
30 bit IN FALSE hm2_7i97.0.ssr.00.out-03
30 bit IN FALSE hm2_7i97.0.ssr.00.out-04
30 bit IN FALSE hm2_7i97.0.ssr.00.out-05
30 u32 IN 0x000F4240 hm2_7i97.0.ssr.00.rate
30 bit I/O FALSE hm2_7i97.0.watchdog.has_bit
30 s32 OUT 5328 hm2_7i97.0.write.time
48 float IN 0 ini.0.backlash
48 float IN 1 ini.0.ferror
48 float IN 0 ini.0.home
48 float IN 0 ini.0.home_offset
48 s32 IN 999 ini.0.home_sequence
48 float IN 200 ini.0.max_acceleration
48 float IN 1 ini.0.max_limit
48 float IN 200 ini.0.max_velocity
48 float IN 0.001 ini.0.min_ferror
48 float IN 0 ini.0.min_limit
48 float IN 0 ini.1.backlash
48 float IN 1 ini.1.ferror
48 float IN 0 ini.1.home
48 float IN 0 ini.1.home_offset
48 s32 IN 999 ini.1.home_sequence
48 float IN 200 ini.1.max_acceleration
48 float IN 1 ini.1.max_limit
48 float IN 200 ini.1.max_velocity
48 float IN 0.001 ini.1.min_ferror
48 float IN 0 ini.1.min_limit
48 float IN 0 ini.2.backlash
48 float IN 1 ini.2.ferror
48 float IN 0 ini.2.home
48 float IN 0 ini.2.home_offset
48 s32 IN 999 ini.2.home_sequence
48 float IN 200 ini.2.max_acceleration
48 float IN 1 ini.2.max_limit
48 float IN 200 ini.2.max_velocity
48 float IN 0.001 ini.2.min_ferror
48 float IN 0 ini.2.min_limit
48 float IN 0 ini.a.max_acceleration
48 float IN 0 ini.a.max_limit
48 float IN 0 ini.a.max_velocity
48 float IN 0 ini.a.min_limit
48 float IN 0 ini.b.max_acceleration
48 float IN 0 ini.b.max_limit
48 float IN 0 ini.b.max_velocity
48 float IN 0 ini.b.min_limit
48 float IN 0 ini.c.max_acceleration
48 float IN 0 ini.c.max_limit
48 float IN 0 ini.c.max_velocity
48 float IN 0 ini.c.min_limit
48 bit IN TRUE ini.traj_arc_blend_enable
48 bit IN FALSE ini.traj_arc_blend_fallback_enable
48 float IN 4 ini.traj_arc_blend_gap_cycles
48 s32 IN 50 ini.traj_arc_blend_optimization_depth
48 float IN 100 ini.traj_arc_blend_ramp_freq
48 float IN 0.1 ini.traj_arc_blend_tangent_kink_ratio
48 float IN 1e+99 ini.traj_default_acceleration
48 float IN 1 ini.traj_default_velocity
48 float IN 1e+99 ini.traj_max_acceleration
48 float IN 5.1 ini.traj_max_velocity
48 float IN 0 ini.u.max_acceleration
48 float IN 0 ini.u.max_limit
48 float IN 0 ini.u.max_velocity
48 float IN 0 ini.u.min_limit
48 float IN 0 ini.v.max_acceleration
48 float IN 0 ini.v.max_limit
48 float IN 0 ini.v.max_velocity
48 float IN 0 ini.v.min_limit
48 float IN 0 ini.w.max_acceleration
48 float IN 0 ini.w.max_limit
48 float IN 0 ini.w.max_velocity
48 float IN 0 ini.w.min_limit
48 float IN 200 ini.x.max_acceleration
48 float IN 1 ini.x.max_limit
48 float IN 200 ini.x.max_velocity
48 float IN 0 ini.x.min_limit
48 float IN 200 ini.y.max_acceleration
48 float IN 1 ini.y.max_limit
48 float IN 200 ini.y.max_velocity
48 float IN 0 ini.y.min_limit
48 float IN 200 ini.z.max_acceleration
48 float IN 1 ini.z.max_limit
48 float IN 200 ini.z.max_velocity
48 float IN 0 ini.z.min_limit
4 bit OUT FALSE iocontrol.0.coolant-flood
4 bit OUT FALSE iocontrol.0.coolant-mist
4 bit OUT TRUE iocontrol.0.emc-abort
4 bit IN FALSE iocontrol.0.emc-abort-ack
4 bit IN TRUE iocontrol.0.emc-enable-in <== estop-loopback
4 s32 OUT 7 iocontrol.0.emc-reason
4 bit OUT TRUE iocontrol.0.lube
4 bit IN FALSE iocontrol.0.lube_level
4 bit OUT FALSE iocontrol.0.start-change
4 bit IN FALSE iocontrol.0.start-change-ack
4 s32 OUT 4 iocontrol.0.state
4 bit OUT FALSE iocontrol.0.tool-change ==> tool-change-loop
4 bit IN FALSE iocontrol.0.tool-changed <== tool-change-loop
4 s32 OUT 0 iocontrol.0.tool-number
4 s32 OUT 0 iocontrol.0.tool-prep-index
4 s32 OUT 0 iocontrol.0.tool-prep-number
4 s32 OUT 0 iocontrol.0.tool-prep-pocket
4 bit OUT FALSE iocontrol.0.tool-prepare ==> tool-prep-loop
4 bit IN FALSE iocontrol.0.tool-prepared <== tool-prep-loop
4 bit IN FALSE iocontrol.0.toolchanger-clear-fault
4 bit IN FALSE iocontrol.0.toolchanger-fault
4 bit OUT FALSE iocontrol.0.toolchanger-fault-ack
4 bit OUT FALSE iocontrol.0.toolchanger-faulted
4 s32 IN 0 iocontrol.0.toolchanger-reason
4 bit OUT TRUE iocontrol.0.user-enable-out ==> estop-loopback
4 bit OUT FALSE iocontrol.0.user-request-enable
23 float OUT 0 joint.0.acc-cmd
23 bit OUT TRUE joint.0.active
23 bit OUT FALSE joint.0.amp-enable-out ==> joint-0-enable
23 bit IN FALSE joint.0.amp-fault-in
23 float OUT 0 joint.0.backlash-corr
23 float OUT 0 joint.0.backlash-filt
23 float OUT 0 joint.0.backlash-vel
23 float OUT 0 joint.0.coarse-pos-cmd
23 bit OUT FALSE joint.0.error
23 float OUT 0 joint.0.f-error
23 float OUT 0.001 joint.0.f-error-lim
23 bit OUT FALSE joint.0.f-errored
23 bit OUT FALSE joint.0.faulted
23 float OUT 0 joint.0.free-pos-cmd
23 bit OUT FALSE joint.0.free-tp-enable
23 float OUT 0 joint.0.free-vel-lim
23 s32 OUT 0 joint.0.home-state
23 bit IN FALSE joint.0.home-sw-in <== plus-minus-home-joint-0
23 bit OUT FALSE joint.0.homed
23 bit OUT FALSE joint.0.homing
23 bit OUT TRUE joint.0.in-position
23 bit I/O FALSE joint.0.index-enable <=> joint-0-index-enable
23 float IN 1 joint.0.jog-accel-fraction
23 s32 IN 0 joint.0.jog-counts
23 bit IN FALSE joint.0.jog-enable
23 float IN 0 joint.0.jog-scale
23 bit IN FALSE joint.0.jog-vel-mode
23 bit OUT FALSE joint.0.kb-jog-active
23 float OUT 0 joint.0.motor-offset
23 float OUT -0.001175 joint.0.motor-pos-cmd ==> joint-0-pos-cmd
23 float IN -0.001175 joint.0.motor-pos-fb <== joint-0-pos-fb
23 bit OUT FALSE joint.0.neg-hard-limit
23 bit IN FALSE joint.0.neg-lim-sw-in <== plus-minus-home-joint-0
23 float OUT -0.001175 joint.0.pos-cmd
23 float OUT -0.001175 joint.0.pos-fb
23 bit OUT FALSE joint.0.pos-hard-limit
23 bit IN FALSE joint.0.pos-lim-sw-in <== plus-minus-home-joint-0
23 float OUT 0 joint.0.vel-cmd
23 bit OUT FALSE joint.0.wheel-jog-active
23 float OUT 0 joint.1.acc-cmd
23 bit OUT TRUE joint.1.active
23 bit OUT FALSE joint.1.amp-enable-out ==> joint-1-enable
23 bit IN FALSE joint.1.amp-fault-in
23 float OUT 0 joint.1.backlash-corr
23 float OUT 0 joint.1.backlash-filt
23 float OUT 0 joint.1.backlash-vel
23 float OUT 0 joint.1.coarse-pos-cmd
23 bit OUT FALSE joint.1.error
23 float OUT 0 joint.1.f-error
23 float OUT 0.001 joint.1.f-error-lim
23 bit OUT FALSE joint.1.f-errored
23 bit OUT FALSE joint.1.faulted
23 float OUT 0 joint.1.free-pos-cmd
23 bit OUT FALSE joint.1.free-tp-enable
23 float OUT 0 joint.1.free-vel-lim
23 s32 OUT 0 joint.1.home-state
23 bit IN FALSE joint.1.home-sw-in <== minus-home-joint-1
23 bit OUT FALSE joint.1.homed
23 bit OUT FALSE joint.1.homing
23 bit OUT TRUE joint.1.in-position
23 bit I/O FALSE joint.1.index-enable <=> joint-1-index-enable
23 float IN 1 joint.1.jog-accel-fraction
23 s32 IN 0 joint.1.jog-counts
23 bit IN FALSE joint.1.jog-enable
23 float IN 0 joint.1.jog-scale
23 bit IN FALSE joint.1.jog-vel-mode
23 bit OUT FALSE joint.1.kb-jog-active
23 float OUT 0 joint.1.motor-offset
23 float OUT 0 joint.1.motor-pos-cmd ==> joint-1-pos-cmd
23 float IN 0 joint.1.motor-pos-fb <== joint-1-pos-fb
23 bit OUT FALSE joint.1.neg-hard-limit
23 bit IN FALSE joint.1.neg-lim-sw-in <== minus-home-joint-1
23 float OUT 0 joint.1.pos-cmd
23 float OUT 0 joint.1.pos-fb
23 bit OUT FALSE joint.1.pos-hard-limit
23 bit IN FALSE joint.1.pos-lim-sw-in <== pos-limit-joint-1
23 float OUT 0 joint.1.vel-cmd
23 bit OUT FALSE joint.1.wheel-jog-active
23 float OUT 0 joint.2.acc-cmd
23 bit OUT TRUE joint.2.active
23 bit OUT FALSE joint.2.amp-enable-out ==> joint-2-enable
23 bit IN FALSE joint.2.amp-fault-in
23 float OUT 0 joint.2.backlash-corr
23 float OUT 0 joint.2.backlash-filt
23 float OUT 0 joint.2.backlash-vel
23 float OUT 0 joint.2.coarse-pos-cmd
23 bit OUT FALSE joint.2.error
23 float OUT 0 joint.2.f-error
23 float OUT 0.001 joint.2.f-error-lim
23 bit OUT FALSE joint.2.f-errored
23 bit OUT FALSE joint.2.faulted
23 float OUT 0 joint.2.free-pos-cmd
23 bit OUT FALSE joint.2.free-tp-enable
23 float OUT 0 joint.2.free-vel-lim
23 s32 OUT 0 joint.2.home-state
23 bit IN FALSE joint.2.home-sw-in <== plus-home-joint-2
23 bit OUT FALSE joint.2.homed
23 bit OUT FALSE joint.2.homing
23 bit OUT TRUE joint.2.in-position
23 bit I/O FALSE joint.2.index-enable <=> joint-2-index-enable
23 float IN 1 joint.2.jog-accel-fraction
23 s32 IN 0 joint.2.jog-counts
23 bit IN FALSE joint.2.jog-enable
23 float IN 0 joint.2.jog-scale
23 bit IN FALSE joint.2.jog-vel-mode
23 bit OUT FALSE joint.2.kb-jog-active
23 float OUT 0 joint.2.motor-offset
23 float OUT 0 joint.2.motor-pos-cmd ==> joint-2-pos-cmd
23 float IN 0 joint.2.motor-pos-fb <== joint-2-pos-fb
23 bit OUT FALSE joint.2.neg-hard-limit
23 bit IN FALSE joint.2.neg-lim-sw-in <== neg-limit-joint-2
23 float OUT 0 joint.2.pos-cmd
23 float OUT 0 joint.2.pos-fb
23 bit OUT FALSE joint.2.pos-hard-limit
23 bit IN FALSE joint.2.pos-lim-sw-in <== plus-home-joint-2
23 float OUT 0 joint.2.vel-cmd
23 bit OUT FALSE joint.2.wheel-jog-active
23 s32 OUT 82 motion-command-handler.time
23 s32 OUT 1598 motion-controller.time
23 float IN 1 motion.adaptive-feed
23 float IN 0 motion.analog-in-00
23 float IN 0 motion.analog-in-01
23 float IN 0 motion.analog-in-02
23 float IN 0 motion.analog-in-03
23 float OUT 0 motion.analog-out-00
23 float OUT 0 motion.analog-out-01
23 float OUT 0 motion.analog-out-02
23 float OUT 0 motion.analog-out-03
23 bit OUT FALSE motion.coord-error
23 bit OUT FALSE motion.coord-mode
23 float OUT 0 motion.current-vel
23 bit IN FALSE motion.digital-in-00
23 bit IN FALSE motion.digital-in-01
23 bit IN FALSE motion.digital-in-02
23 bit IN FALSE motion.digital-in-03
23 bit OUT FALSE motion.digital-out-00
23 bit OUT FALSE motion.digital-out-01
23 bit OUT FALSE motion.digital-out-02
23 bit OUT FALSE motion.digital-out-03
23 float OUT 0 motion.distance-to-go
23 bit IN TRUE motion.enable
23 bit OUT FALSE motion.eoffset-active
23 bit OUT FALSE motion.eoffset-limited
23 bit IN FALSE motion.feed-hold
23 float OUT 0 motion.feed-inches-per-minute
23 float OUT 0 motion.feed-inches-per-second
23 bit IN FALSE motion.feed-inhibit
23 float OUT 0 motion.feed-mm-per-minute
23 float OUT 0 motion.feed-mm-per-second
23 float OUT 0 motion.feed-upm
23 bit IN FALSE motion.homing-inhibit
23 bit OUT TRUE motion.in-position
23 bit OUT FALSE motion.is-all-homed
23 bit IN FALSE motion.jog-inhibit
23 bit OUT FALSE motion.jog-is-active
23 bit IN FALSE motion.jog-stop
23 bit IN FALSE motion.jog-stop-immediate
23 bit OUT FALSE motion.motion-enabled ==> motion-enable
23 s32 OUT 0 motion.motion-type
23 bit OUT FALSE motion.on-soft-limit
23 bit IN FALSE motion.probe-input
23 s32 OUT 0 motion.program-line
23 float OUT 0 motion.requested-vel
23 u32 OUT 0x000C33E2 motion.servo.last-period
23 bit OUT FALSE motion.teleop-mode
23 float OUT 0 motion.tooloffset.a
23 float OUT 0 motion.tooloffset.b
23 float OUT 0 motion.tooloffset.c
23 float OUT 0 motion.tooloffset.u
23 float OUT 0 motion.tooloffset.v
23 float OUT 0 motion.tooloffset.w
23 float OUT 0 motion.tooloffset.x
23 float OUT 0 motion.tooloffset.y
23 float OUT 0 motion.tooloffset.z
23 bit OUT FALSE motion.tp-reverse
33 float IN 0 pid.x.Dgain
33 float IN 0 pid.x.FF0
33 float IN 0 pid.x.FF1
33 float IN 0 pid.x.FF2
33 float IN 0 pid.x.FF3
33 float IN 0 pid.x.Igain
33 float IN 1 pid.x.Pgain
33 float IN 0 pid.x.bias
33 float IN -0.001175 pid.x.command <== joint-0-pos-cmd
33 float IN 0 pid.x.command-deriv
33 float IN 0 pid.x.deadband
33 s32 OUT 93 pid.x.do-pid-calcs.time
33 bit IN FALSE pid.x.enable <== joint-0-enable
33 float OUT 0 pid.x.error
33 bit IN TRUE pid.x.error-previous-target
33 float IN -0.001175 pid.x.feedback <== joint-0-pos-fb
33 float IN 0 pid.x.feedback-deriv
33 bit IN FALSE pid.x.index-enable <== joint-0-index-enable
33 float IN 0 pid.x.maxcmdD
33 float IN 0 pid.x.maxcmdDD
33 float IN 0 pid.x.maxcmdDDD
33 float IN 0 pid.x.maxerror
33 float IN 0 pid.x.maxerrorD
33 float IN 0 pid.x.maxerrorI
33 float IN 10 pid.x.maxoutput
33 float OUT 0 pid.x.output ==> joint.0.output
33 bit OUT FALSE pid.x.saturated
33 s32 OUT 0 pid.x.saturated-count
33 float OUT 0 pid.x.saturated-s
33 u32 I/O 0x00000032 pid.x.tune-cycles
33 float I/O 0.5 pid.x.tune-effort
33 bit IN FALSE pid.x.tune-mode
33 bit I/O FALSE pid.x.tune-start
33 u32 I/O 0x00000000 pid.x.tune-type
33 float IN 0 pid.y.Dgain
33 float IN 0 pid.y.FF0
33 float IN 0 pid.y.FF1
33 float IN 0 pid.y.FF2
33 float IN 0 pid.y.FF3
33 float IN 0 pid.y.Igain
33 float IN 1 pid.y.Pgain
33 float IN 0 pid.y.bias
33 float IN 0 pid.y.command <== joint-1-pos-cmd
33 float IN 0 pid.y.command-deriv
33 float IN 0 pid.y.deadband
33 s32 OUT 23 pid.y.do-pid-calcs.time
33 bit IN FALSE pid.y.enable <== joint-1-enable
33 float OUT 0 pid.y.error
33 bit IN TRUE pid.y.error-previous-target
33 float IN 0 pid.y.feedback <== joint-1-pos-fb
33 float IN 0 pid.y.feedback-deriv
33 bit IN FALSE pid.y.index-enable <== joint-1-index-enable
33 float IN 0 pid.y.maxcmdD
33 float IN 0 pid.y.maxcmdDD
33 float IN 0 pid.y.maxcmdDDD
33 float IN 0 pid.y.maxerror
33 float IN 0 pid.y.maxerrorD
33 float IN 0 pid.y.maxerrorI
33 float IN 10 pid.y.maxoutput
33 float OUT 0 pid.y.output ==> joint.1.output
33 bit OUT FALSE pid.y.saturated
33 s32 OUT 0 pid.y.saturated-count
33 float OUT 0 pid.y.saturated-s
33 u32 I/O 0x00000032 pid.y.tune-cycles
33 float I/O 0.5 pid.y.tune-effort
33 bit IN FALSE pid.y.tune-mode
33 bit I/O FALSE pid.y.tune-start
33 u32 I/O 0x00000000 pid.y.tune-type
33 float IN 0 pid.z.Dgain
33 float IN 0 pid.z.FF0
33 float IN 0 pid.z.FF1
33 float IN 0 pid.z.FF2
33 float IN 0 pid.z.FF3
33 float IN 0 pid.z.Igain
33 float IN 1 pid.z.Pgain
33 float IN 0 pid.z.bias
33 float IN 0 pid.z.command <== joint-2-pos-cmd
33 float IN 0 pid.z.command-deriv
33 float IN 0 pid.z.deadband
33 s32 OUT 35 pid.z.do-pid-calcs.time
33 bit IN FALSE pid.z.enable <== joint-2-enable
33 float OUT 0 pid.z.error
33 bit IN TRUE pid.z.error-previous-target
33 float IN 0 pid.z.feedback <== joint-2-pos-fb
33 float IN 0 pid.z.feedback-deriv
33 bit IN FALSE pid.z.index-enable <== joint-2-index-enable
33 float IN 0 pid.z.maxcmdD
33 float IN 0 pid.z.maxcmdDD
33 float IN 0 pid.z.maxcmdDDD
33 float IN 0 pid.z.maxerror
33 float IN 0 pid.z.maxerrorD
33 float IN 0 pid.z.maxerrorI
33 float IN 10 pid.z.maxoutput
33 float OUT 0 pid.z.output ==> joint.2.output
33 bit OUT FALSE pid.z.saturated
33 s32 OUT 0 pid.z.saturated-count
33 float OUT 0 pid.z.saturated-s
33 u32 I/O 0x00000032 pid.z.tune-cycles
33 float I/O 0.5 pid.z.tune-effort
33 bit IN FALSE pid.z.tune-mode
33 bit I/O FALSE pid.z.tune-start
33 u32 I/O 0x00000000 pid.z.tune-type
24 s32 OUT 69422 servo-thread.time
23 bit IN FALSE spindle.0.amp-fault-in
23 bit IN TRUE spindle.0.at-speed
23 bit OUT TRUE spindle.0.brake
23 bit OUT FALSE spindle.0.forward
23 bit I/O FALSE spindle.0.index-enable
23 bit IN FALSE spindle.0.inhibit
23 bit IN FALSE spindle.0.is-oriented
23 bit OUT FALSE spindle.0.locked
23 bit OUT FALSE spindle.0.on
23 bit OUT FALSE spindle.0.orient
23 float OUT 0 spindle.0.orient-angle
23 s32 IN 0 spindle.0.orient-fault
23 s32 OUT 0 spindle.0.orient-mode
23 bit OUT FALSE spindle.0.reverse
23 float IN 0 spindle.0.revs
23 float OUT 0 spindle.0.speed-cmd-rps
23 float IN 0 spindle.0.speed-in
23 float OUT 0 spindle.0.speed-out
23 float OUT 0 spindle.0.speed-out-abs
23 float OUT 0 spindle.0.speed-out-rps
23 float OUT 0 spindle.0.speed-out-rps-abs
Pin Aliases:
Alias Original Name
Signals:
Type Value Name (linked to)
bit TRUE estop-loopback
==> iocontrol.0.emc-enable-in
<== iocontrol.0.user-enable-out
bit FALSE joint-0-enable
==> hm2_7i97.0.pwmgen.00.enable
<== joint.0.amp-enable-out
==> pid.x.enable
bit FALSE joint-0-index-enable
<=> hm2_7i97.0.encoder.00.index-enable
<=> joint.0.index-enable
==> pid.x.index-enable
float -0.001175 joint-0-pos-cmd
<== joint.0.motor-pos-cmd
==> pid.x.command
float -0.001175 joint-0-pos-fb
<== hm2_7i97.0.encoder.00.position
==> joint.0.motor-pos-fb
==> pid.x.feedback
bit FALSE joint-1-enable
==> hm2_7i97.0.pwmgen.01.enable
<== joint.1.amp-enable-out
==> pid.y.enable
bit FALSE joint-1-index-enable
<=> hm2_7i97.0.encoder.01.index-enable
<=> joint.1.index-enable
==> pid.y.index-enable
float 0 joint-1-pos-cmd
<== joint.1.motor-pos-cmd
==> pid.y.command
float 0 joint-1-pos-fb
<== hm2_7i97.0.encoder.01.position
==> joint.1.motor-pos-fb
==> pid.y.feedback
bit FALSE joint-2-enable
==> hm2_7i97.0.pwmgen.02.enable
<== joint.2.amp-enable-out
==> pid.z.enable
bit FALSE joint-2-index-enable
<=> hm2_7i97.0.encoder.02.index-enable
<=> joint.2.index-enable
==> pid.z.index-enable
float 0 joint-2-pos-cmd
<== joint.2.motor-pos-cmd
==> pid.z.command
float 0 joint-2-pos-fb
<== hm2_7i97.0.encoder.02.position
==> joint.2.motor-pos-fb
==> pid.z.feedback
float 0 joint.0.output
==> hm2_7i97.0.pwmgen.00.value
<== pid.x.output
float 0 joint.1.output
==> hm2_7i97.0.pwmgen.01.value
<== pid.y.output
float 0 joint.2.output
==> hm2_7i97.0.pwmgen.02.value
<== pid.z.output
bit FALSE minus-home-joint-1
<== hm2_7i97.0.inmux.00.input-01-not
==> joint.1.home-sw-in
==> joint.1.neg-lim-sw-in
bit FALSE motion-enable
<== motion.motion-enabled
bit FALSE neg-limit-joint-2
<== hm2_7i97.0.inmux.00.input-04-not
==> joint.2.neg-lim-sw-in
bit FALSE plus-home-joint-2
<== hm2_7i97.0.inmux.00.input-03-not
==> joint.2.home-sw-in
==> joint.2.pos-lim-sw-in
bit FALSE plus-minus-home-joint-0
<== hm2_7i97.0.inmux.00.input-00-not
==> joint.0.home-sw-in
==> joint.0.neg-lim-sw-in
==> joint.0.pos-lim-sw-in
bit FALSE pos-limit-joint-1
<== hm2_7i97.0.inmux.00.input-02-not
==> joint.1.pos-lim-sw-in
bit FALSE tool-change-confirmed
<== hal_manualtoolchange.changed
bit FALSE tool-change-loop
<== iocontrol.0.tool-change
==> iocontrol.0.tool-changed
bit FALSE tool-change-request
==> hal_manualtoolchange.change
s32 0 tool-number
==> hal_manualtoolchange.number
bit FALSE tool-prep-loop
<== iocontrol.0.tool-prepare
==> iocontrol.0.tool-prepared
Parameters:
Owner Type Dir Value Name
30 bit RW FALSE hm2_7i97.0.encoder.00.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.00.filter
30 bit RW FALSE hm2_7i97.0.encoder.00.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.00.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.00.index-mask-invert
30 float RW 40000 hm2_7i97.0.encoder.00.scale
30 bit RW FALSE hm2_7i97.0.encoder.00.sel0.invert_output
30 bit RW FALSE hm2_7i97.0.encoder.00.sel0.is_opendrain
30 float RW 0.5 hm2_7i97.0.encoder.00.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.01.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.01.filter
30 bit RW FALSE hm2_7i97.0.encoder.01.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.01.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.01.index-mask-invert
30 float RW 40000 hm2_7i97.0.encoder.01.scale
30 float RW 0.5 hm2_7i97.0.encoder.01.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.02.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.02.filter
30 bit RW FALSE hm2_7i97.0.encoder.02.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.02.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.02.index-mask-invert
30 float RW 40000 hm2_7i97.0.encoder.02.scale
30 float RW 0.5 hm2_7i97.0.encoder.02.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.03.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.03.filter
30 bit RW FALSE hm2_7i97.0.encoder.03.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.03.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.03.index-mask-invert
30 float RW 1 hm2_7i97.0.encoder.03.scale
30 float RW 0.5 hm2_7i97.0.encoder.03.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.04.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.04.filter
30 bit RW FALSE hm2_7i97.0.encoder.04.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.04.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.04.index-mask-invert
30 float RW 1 hm2_7i97.0.encoder.04.scale
30 float RW 0.5 hm2_7i97.0.encoder.04.vel-timeout
30 bit RW FALSE hm2_7i97.0.encoder.05.counter-mode
30 bit RW TRUE hm2_7i97.0.encoder.05.filter
30 bit RW FALSE hm2_7i97.0.encoder.05.index-invert
30 bit RW FALSE hm2_7i97.0.encoder.05.index-mask
30 bit RW FALSE hm2_7i97.0.encoder.05.index-mask-invert
30 float RW 1 hm2_7i97.0.encoder.05.scale
30 float RW 0.5 hm2_7i97.0.encoder.05.vel-timeout
30 bit RW FALSE hm2_7i97.0.gpio.019.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.019.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.020.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.020.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.021.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.021.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.022.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.022.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.023.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.023.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.024.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.024.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.025.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.025.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.026.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.026.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.027.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.027.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.028.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.028.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.029.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.029.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.031.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.031.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.031.is_output
30 bit RW FALSE hm2_7i97.0.gpio.032.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.032.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.032.is_output
30 bit RW FALSE hm2_7i97.0.gpio.033.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.033.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.033.is_output
30 bit RW FALSE hm2_7i97.0.gpio.034.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.034.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.034.is_output
30 bit RW FALSE hm2_7i97.0.gpio.035.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.035.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.035.is_output
30 bit RW FALSE hm2_7i97.0.gpio.036.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.036.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.036.is_output
30 bit RW FALSE hm2_7i97.0.gpio.037.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.037.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.037.is_output
30 bit RW FALSE hm2_7i97.0.gpio.038.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.038.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.038.is_output
30 bit RW FALSE hm2_7i97.0.gpio.039.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.039.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.039.is_output
30 bit RW FALSE hm2_7i97.0.gpio.040.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.040.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.040.is_output
30 bit RW FALSE hm2_7i97.0.gpio.041.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.041.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.041.is_output
30 bit RW FALSE hm2_7i97.0.gpio.042.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.042.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.042.is_output
30 bit RW FALSE hm2_7i97.0.gpio.043.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.043.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.043.is_output
30 bit RW FALSE hm2_7i97.0.gpio.044.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.044.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.044.is_output
30 bit RW FALSE hm2_7i97.0.gpio.045.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.045.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.045.is_output
30 bit RW FALSE hm2_7i97.0.gpio.046.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.046.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.046.is_output
30 bit RW FALSE hm2_7i97.0.gpio.047.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.047.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.047.is_output
30 bit RW FALSE hm2_7i97.0.gpio.048.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.048.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.048.is_output
30 bit RW FALSE hm2_7i97.0.gpio.049.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.049.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.049.is_output
30 bit RW FALSE hm2_7i97.0.gpio.050.invert_output
30 bit RW FALSE hm2_7i97.0.gpio.050.is_opendrain
30 bit RW FALSE hm2_7i97.0.gpio.050.is_output
30 bit RW FALSE hm2_7i97.0.inmux.00.enc0_4xmode
30 bit RW FALSE hm2_7i97.0.inmux.00.enc1_4xmode
30 bit RW FALSE hm2_7i97.0.inmux.00.enc2_4xmode
30 bit RW FALSE hm2_7i97.0.inmux.00.enc3_4xmode
30 u32 RW 0x00000005 hm2_7i97.0.inmux.00.fast_scans
30 u32 RW 0x00004E20 hm2_7i97.0.inmux.00.scan_rate
30 u32 RO 0x00000010 hm2_7i97.0.inmux.00.scan_width
30 u32 RW 0x000001F4 hm2_7i97.0.inmux.00.slow_scans
30 bit RW FALSE hm2_7i97.0.io_error
30 s32 RO 1 hm2_7i97.0.packet-error-decrement
30 s32 RW 2 hm2_7i97.0.packet-error-increment
30 s32 RW 10 hm2_7i97.0.packet-error-limit
30 s32 RW 80 hm2_7i97.0.packet-read-timeout
30 bit RW TRUE hm2_7i97.0.pwmgen.00.dither
30 bit RW FALSE hm2_7i97.0.pwmgen.00.enable.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.00.enable.is_opendrain
30 bit RW TRUE hm2_7i97.0.pwmgen.00.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.00.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.00.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.00.output-type
30 float RW 40000 hm2_7i97.0.pwmgen.00.scale
30 bit RW TRUE hm2_7i97.0.pwmgen.01.dither
30 bit RW TRUE hm2_7i97.0.pwmgen.01.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.01.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.01.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.01.output-type
30 float RW 40000 hm2_7i97.0.pwmgen.01.scale
30 bit RW TRUE hm2_7i97.0.pwmgen.02.dither
30 bit RW TRUE hm2_7i97.0.pwmgen.02.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.02.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.02.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.02.output-type
30 float RW 40000 hm2_7i97.0.pwmgen.02.scale
30 bit RW FALSE hm2_7i97.0.pwmgen.03.dither
30 bit RW FALSE hm2_7i97.0.pwmgen.03.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.03.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.03.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.03.output-type
30 float RW 1 hm2_7i97.0.pwmgen.03.scale
30 bit RW FALSE hm2_7i97.0.pwmgen.04.dither
30 bit RW FALSE hm2_7i97.0.pwmgen.04.enable.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.04.enable.is_opendrain
30 bit RW FALSE hm2_7i97.0.pwmgen.04.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.04.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.04.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.04.output-type
30 float RW 1 hm2_7i97.0.pwmgen.04.scale
30 bit RW FALSE hm2_7i97.0.pwmgen.05.dither
30 bit RW FALSE hm2_7i97.0.pwmgen.05.enable.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.05.enable.is_opendrain
30 bit RW FALSE hm2_7i97.0.pwmgen.05.offset-mode
30 bit RW FALSE hm2_7i97.0.pwmgen.05.out0.invert_output
30 bit RW FALSE hm2_7i97.0.pwmgen.05.out0.is_opendrain
30 s32 RW 1 hm2_7i97.0.pwmgen.05.output-type
30 float RW 1 hm2_7i97.0.pwmgen.05.scale
30 u32 RW 0x00004E20 hm2_7i97.0.pwmgen.pdm_frequency
30 u32 RW 0x000124F8 hm2_7i97.0.pwmgen.pwm_frequency
30 s32 RW 0 hm2_7i97.0.read-request.tmax
30 bit RO FALSE hm2_7i97.0.read-request.tmax-increased
30 s32 RW 143945 hm2_7i97.0.read.tmax
30 bit RO FALSE hm2_7i97.0.read.tmax-increased
30 u32 RW 0x004C4B40 hm2_7i97.0.watchdog.timeout_ns
30 s32 RW 24505 hm2_7i97.0.write.tmax
30 bit RO FALSE hm2_7i97.0.write.tmax-increased
23 s32 RW 4011 motion-command-handler.tmax
23 bit RO FALSE motion-command-handler.tmax-increased
23 s32 RW 24322 motion-controller.tmax
23 bit RO FALSE motion-controller.tmax-increased
23 bit RO FALSE motion.debug-bit-0
23 bit RO FALSE motion.debug-bit-1
23 float RO 0 motion.debug-float-0
23 float RO 0 motion.debug-float-1
23 float RO 0 motion.debug-float-2
23 float RO 1 motion.debug-float-3
23 s32 RO 0 motion.debug-s32-0
23 s32 RO 0 motion.debug-s32-1
33 s32 RW 4618 pid.x.do-pid-calcs.tmax
33 bit RO FALSE pid.x.do-pid-calcs.tmax-increased
33 s32 RW 2554 pid.y.do-pid-calcs.tmax
33 bit RO FALSE pid.y.do-pid-calcs.tmax-increased
33 s32 RW 2090 pid.z.do-pid-calcs.tmax
33 bit RO FALSE pid.z.do-pid-calcs.tmax-increased
24 s32 RW 168007 servo-thread.tmax
23 float RO 0 tc.0.acc
23 float RO 0 tc.0.pos
23 float RO 0 tc.0.vel
23 float RO 0 tc.1.acc
23 float RO 0 tc.1.pos
23 float RO 0 tc.1.vel
23 float RO 0 tc.2.acc
23 float RO 0 tc.2.pos
23 float RO 0 tc.2.vel
23 float RO 0 tc.3.acc
23 float RO 0 tc.3.pos
23 float RO 0 tc.3.vel
23 u32 RO 0x00000000 traj.active_tc
23 float RO 0 traj.pos_out
23 float RO 0 traj.vel_out
Parameter Aliases:
Alias Original Name
hm2_7i97.0.encoder.00.sel0.invert_output hm2_7i97.0.gpio.018.invert_output
hm2_7i97.0.encoder.00.sel0.is_opendrain hm2_7i97.0.gpio.018.is_opendrain
hm2_7i97.0.pwmgen.00.enable.invert_output hm2_7i97.0.gpio.008.invert_output
hm2_7i97.0.pwmgen.00.enable.is_opendrain hm2_7i97.0.gpio.008.is_opendrain
hm2_7i97.0.pwmgen.00.out0.invert_output hm2_7i97.0.gpio.000.invert_output
hm2_7i97.0.pwmgen.00.out0.is_opendrain hm2_7i97.0.gpio.000.is_opendrain
hm2_7i97.0.pwmgen.01.out0.invert_output hm2_7i97.0.gpio.001.invert_output
hm2_7i97.0.pwmgen.01.out0.is_opendrain hm2_7i97.0.gpio.001.is_opendrain
hm2_7i97.0.pwmgen.02.out0.invert_output hm2_7i97.0.gpio.002.invert_output
hm2_7i97.0.pwmgen.02.out0.is_opendrain hm2_7i97.0.gpio.002.is_opendrain
hm2_7i97.0.pwmgen.03.out0.invert_output hm2_7i97.0.gpio.003.invert_output
hm2_7i97.0.pwmgen.03.out0.is_opendrain hm2_7i97.0.gpio.003.is_opendrain
hm2_7i97.0.pwmgen.04.enable.invert_output hm2_7i97.0.gpio.005.invert_output
hm2_7i97.0.pwmgen.04.enable.is_opendrain hm2_7i97.0.gpio.005.is_opendrain
hm2_7i97.0.pwmgen.04.out0.invert_output hm2_7i97.0.gpio.004.invert_output
hm2_7i97.0.pwmgen.04.out0.is_opendrain hm2_7i97.0.gpio.004.is_opendrain
hm2_7i97.0.pwmgen.05.enable.invert_output hm2_7i97.0.gpio.007.invert_output
hm2_7i97.0.pwmgen.05.enable.is_opendrain hm2_7i97.0.gpio.007.is_opendrain
hm2_7i97.0.pwmgen.05.out0.invert_output hm2_7i97.0.gpio.006.invert_output
hm2_7i97.0.pwmgen.05.out0.is_opendrain hm2_7i97.0.gpio.006.is_opendrain
Exported Functions:
Owner CodeAddr Arg FP Users Name
00030 7f454f271908 558d598d2b10 YES 1 hm2_7i97.0.read
00030 7f454f271891 558d598d2b10 YES 0 hm2_7i97.0.read-request
00030 7f454f271749 558d598d2b10 YES 1 hm2_7i97.0.write
00023 7f454f3b73ad 00000000 YES 1 motion-command-handler
00023 7f454f3b79a0 00000000 YES 1 motion-controller
00033 7f454f258240 7f454f6633f0 YES 1 pid.x.do-pid-calcs
00033 7f454f258240 7f454f663590 YES 1 pid.y.do-pid-calcs
00033 7f454f258240 7f454f663730 YES 1 pid.z.do-pid-calcs
Realtime Threads:
Period FP Name ( Time, Max-Time )
1000000 YES servo-thread ( 70409, 168007 )
1 hm2_7i97.0.read
2 motion-command-handler
3 motion-controller
4 pid.x.do-pid-calcs
5 pid.y.do-pid-calcs
6 pid.z.do-pid-calcs
7 hm2_7i97.0.write
kris@mill:~$ all,txt
bash: all,txt: command not found
kris@mill:~$ > all,txt
kris@mill:~$
- PCW
22 Feb 2025 00:25
Replied by PCW on topic 7I97T joint following error
7I97T joint following error
Category: General LinuxCNC Questions
Can you run this command (in a terminal) when LinuxCNC is running, has no faults and you
expect some analog output?
halcmd show all > all,txt
And the post all.txt here.
expect some analog output?
halcmd show all > all,txt
And the post all.txt here.
- PCW
22 Feb 2025 00:13
Replied by PCW on topic Firmware issue with 6i25
Firmware issue with 6i25
Category: Driver Boards
5i25_7i76x2_2pd.bit
Time to create page: 1.112 seconds