Search Results (Searched for: )
- slowpoke
- slowpoke
01 Jan 2025 22:03 - 01 Jan 2025 22:17
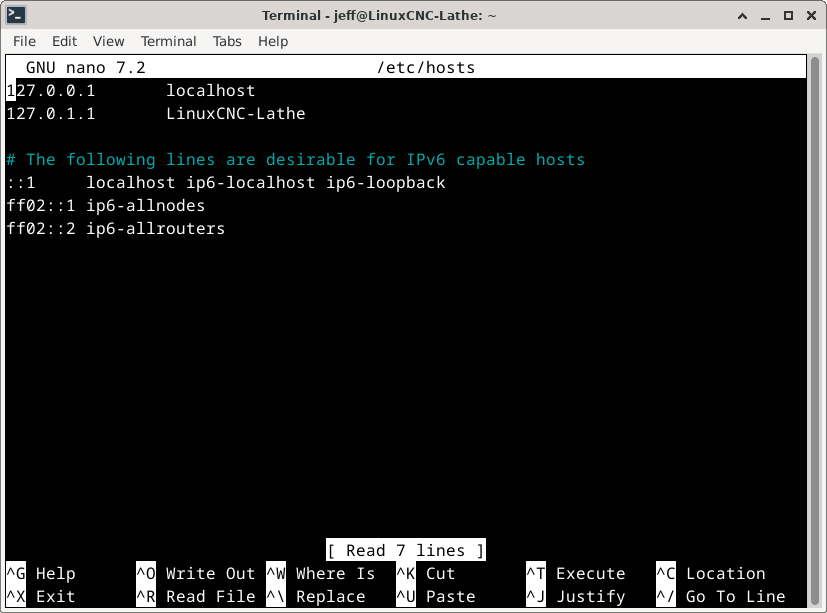
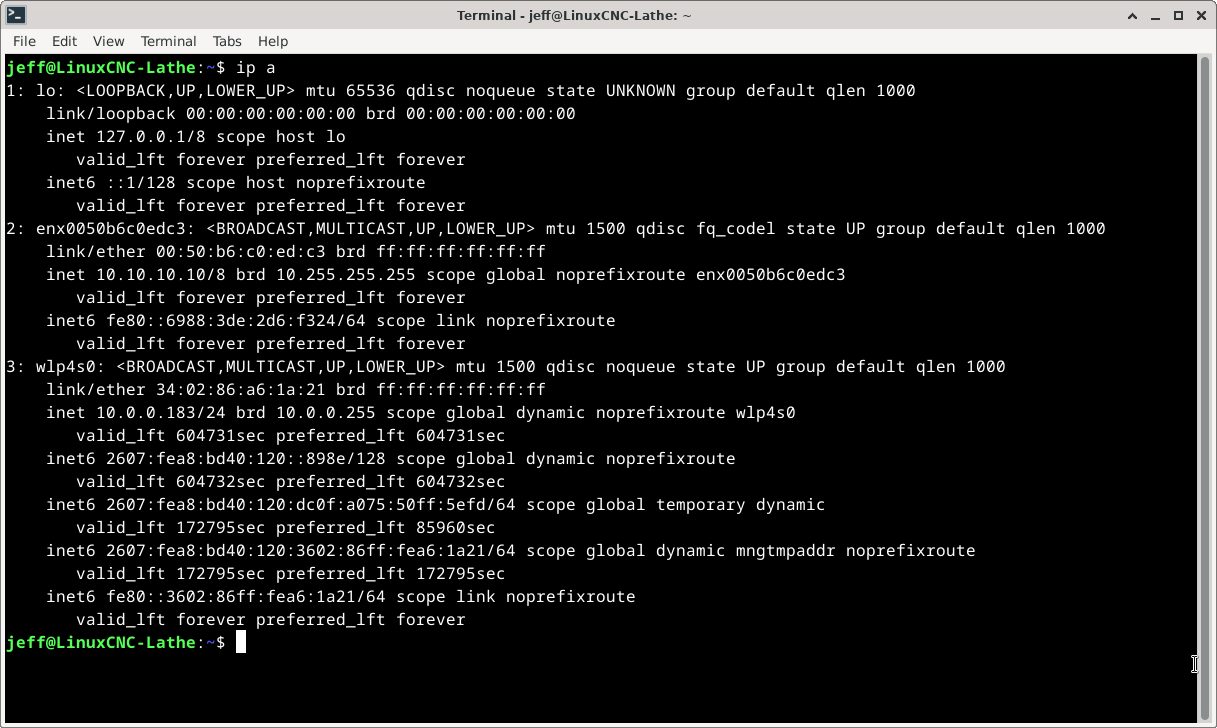
Replied by slowpoke on topic 7i96s not recognized
7i96s not recognized
Category: Basic Configuration
- Grotius

01 Jan 2025 22:00
- RNJFAB
- RNJFAB
01 Jan 2025 21:41 - 01 Jan 2025 21:44
Replied by RNJFAB on topic Homemade CNC Plasma - hypertherm, Mesa, gear drives, nema 34.
Homemade CNC Plasma - hypertherm, Mesa, gear drives, nema 34.
Category: Show Your Stuff
- kzali
- kzali
01 Jan 2025 21:38 - 01 Jan 2025 21:41
- cmorley
- cmorley
01 Jan 2025 21:24
- PCW

01 Jan 2025 21:08
- cmorley
- cmorley
01 Jan 2025 20:48
Replied by cmorley on topic qtDragon LED Probe und Spindeldrehzahl anzeigen
qtDragon LED Probe und Spindeldrehzahl anzeigen
Category: Deutsch
- slowpoke
- slowpoke
01 Jan 2025 20:46
Replied by slowpoke on topic 7i96s not recognized
7i96s not recognized
Category: Basic Configuration
- RV3Dtech
- RV3Dtech
01 Jan 2025 20:07
Replied by RV3Dtech on topic qtDragon LED Probe und Spindeldrehzahl anzeigen
qtDragon LED Probe und Spindeldrehzahl anzeigen
Category: Deutsch
- gilesclement
- gilesclement
01 Jan 2025 19:47
Replied by gilesclement on topic Trouble Shooting USB Jogging with an Xbox Controller
Trouble Shooting USB Jogging with an Xbox Controller
Category: General LinuxCNC Questions
- zelo
- zelo
01 Jan 2025 18:33 - 01 Jan 2025 18:37
Replied by zelo on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
")
- PCW
01 Jan 2025 18:29
Replied by PCW on topic Spindle speed and instatnly powered led
Spindle speed and instatnly powered led
Category: Qtvcp
- ihavenofish
- ihavenofish
01 Jan 2025 18:05 - 01 Jan 2025 18:05
Replied by ihavenofish on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines

- ErwinCNC
- ErwinCNC
01 Jan 2025 18:00
Replied by ErwinCNC on topic Linux CNC startet nicht mehr
Linux CNC startet nicht mehr
Category: Deutsch
- BSOD
- BSOD
01 Jan 2025 17:48 - 01 Jan 2025 18:31
Replied by BSOD on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
Time to create page: 0.797 seconds