Search Results (Searched for: )
- pawel77
- pawel77
21 Aug 2024 06:50
- mighty_mick

21 Aug 2024 06:43
Replied by mighty_mick on topic How to make HAL pins from .c kinematics file?
How to make HAL pins from .c kinematics file?
Category: HAL
- snowgoer540

21 Aug 2024 06:00 - 21 Aug 2024 16:01
")
- rodw

21 Aug 2024 04:59
Replied by rodw on topic Pi4b and Pi5 users - What should go in a 2.9.3 image
Pi4b and Pi5 users - What should go in a 2.9.3 image
Category: Installing LinuxCNC
- Ray_TL00
- Ray_TL00
21 Aug 2024 03:34
Replied by Ray_TL00 on topic New and Working RTAI debs for 2.9
New and Working RTAI debs for 2.9
Category: Installing LinuxCNC
- PCW

21 Aug 2024 02:52 - 21 Aug 2024 02:52
- Benb

21 Aug 2024 02:06 - 21 Aug 2024 02:13
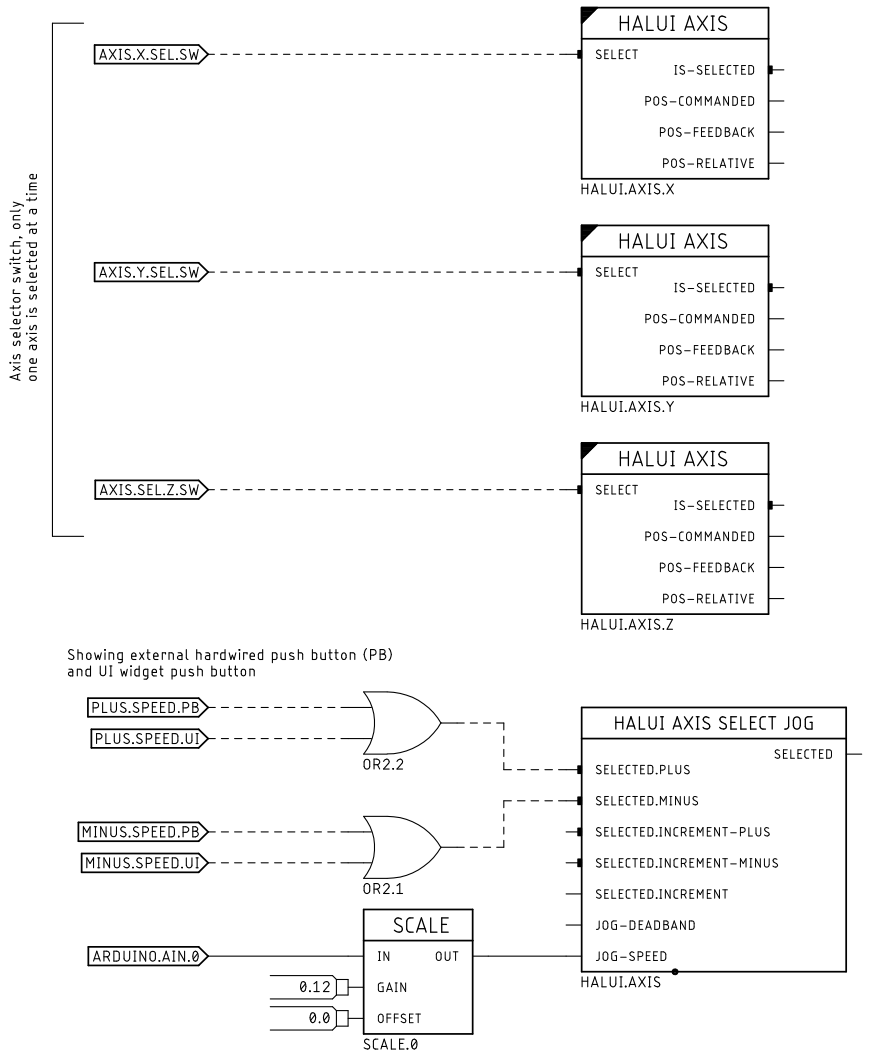
Replied by Benb on topic Dynamic jog speed from HAL, Possible?
Dynamic jog speed from HAL, Possible?
Category: HAL
- bentiggin
- bentiggin
21 Aug 2024 01:40
Replied by bentiggin on topic Gui for standalone thc
Gui for standalone thc
Category: Plasma & Laser
- bentiggin
- bentiggin
21 Aug 2024 01:21
Replied by bentiggin on topic Gui for standalone thc
Gui for standalone thc
Category: Plasma & Laser
- slowpoke
- slowpoke
21 Aug 2024 01:20
Replied by slowpoke on topic Dynamic jog speed from HAL, Possible?
Dynamic jog speed from HAL, Possible?
Category: HAL
- rdtsc

21 Aug 2024 01:19 - 21 Aug 2024 01:20
Replied by rdtsc on topic Pi4b and Pi5 users - What should go in a 2.9.3 image
Pi4b and Pi5 users - What should go in a 2.9.3 image
Category: Installing LinuxCNC
- slowpoke
- slowpoke
21 Aug 2024 01:17
Replied by slowpoke on topic Dynamic jog speed from HAL, Possible?
Dynamic jog speed from HAL, Possible?
Category: HAL
- PCW
21 Aug 2024 00:08 - 21 Aug 2024 00:15
- avive
- avive
20 Aug 2024 23:35
Replied by avive on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT
- nwallace
- nwallace
20 Aug 2024 23:24
Time to create page: 0.457 seconds