Category: Advanced Configuration
Still no go.
Here are my ini variables:
[LASER]
laser-offset-x = -3.2017
laser-offset-y = -0.2124
Here is my oword macro:
o<auto-xy-zero> sub
; ( Move table to program start)
G91 G0 X#<_ini[LASER]laser-offset-x> Y#<_ini[LASER]laser-offset-y>
G10 L20 P0 X0 Y0 A0 ( Set X/Y/A DROs to zero )
o<auto-xy-zero> endsub
m2
This is the EMC_Action_MDI class in the gvcp-panel.ui
<object class="EMC_Action_MDI" id="auto-xy-zero">
<property name="command">o<auto-xy-zero> call </property>
</object>
.
.
.
and the related button configuration in the same file:
<object class="HAL_Button" id="auto-set-xy-zero">
<property name="label" translatable="yes">Auto X/Y Zero</property>
<property name="related-action">auto-xy-zero</property>
<property name="visible">True</property>
<property name="can-focus">True</property>
<property name="receives-default">True</property>
</object>
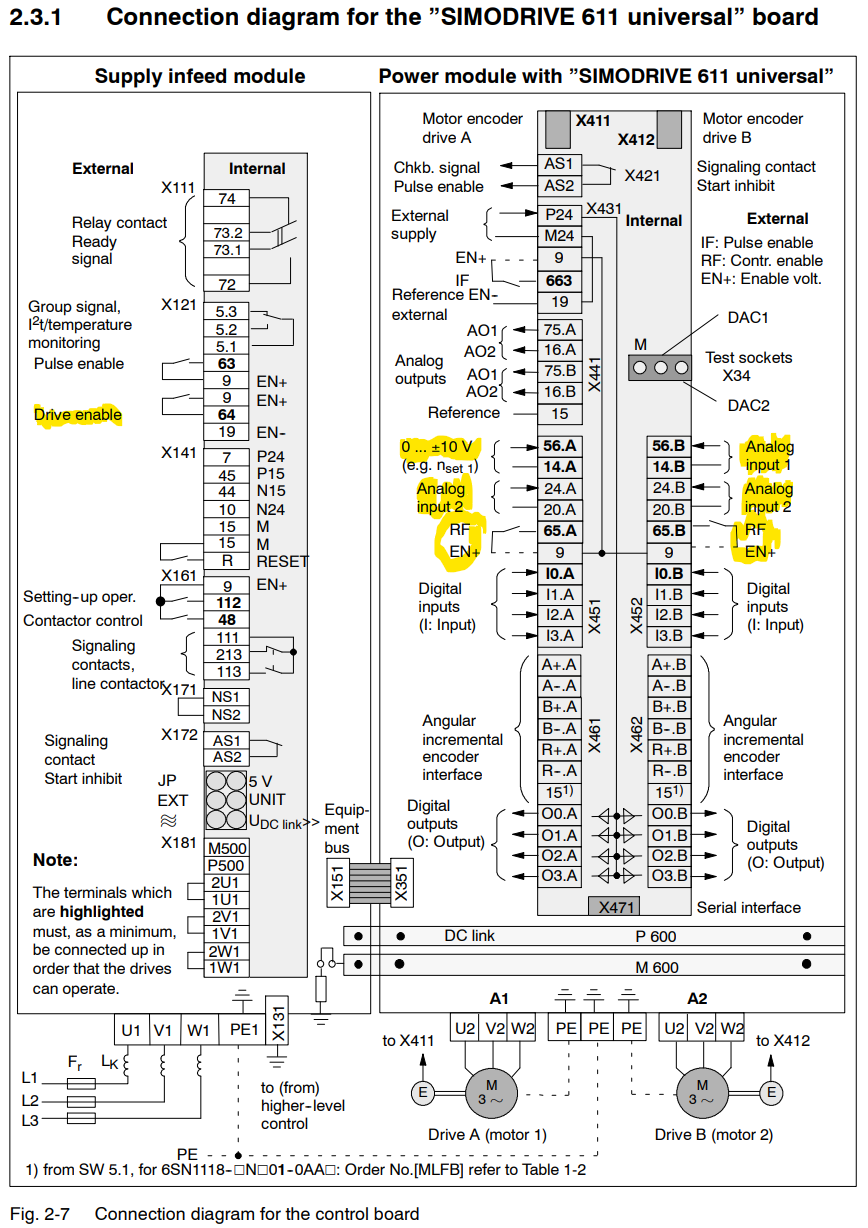
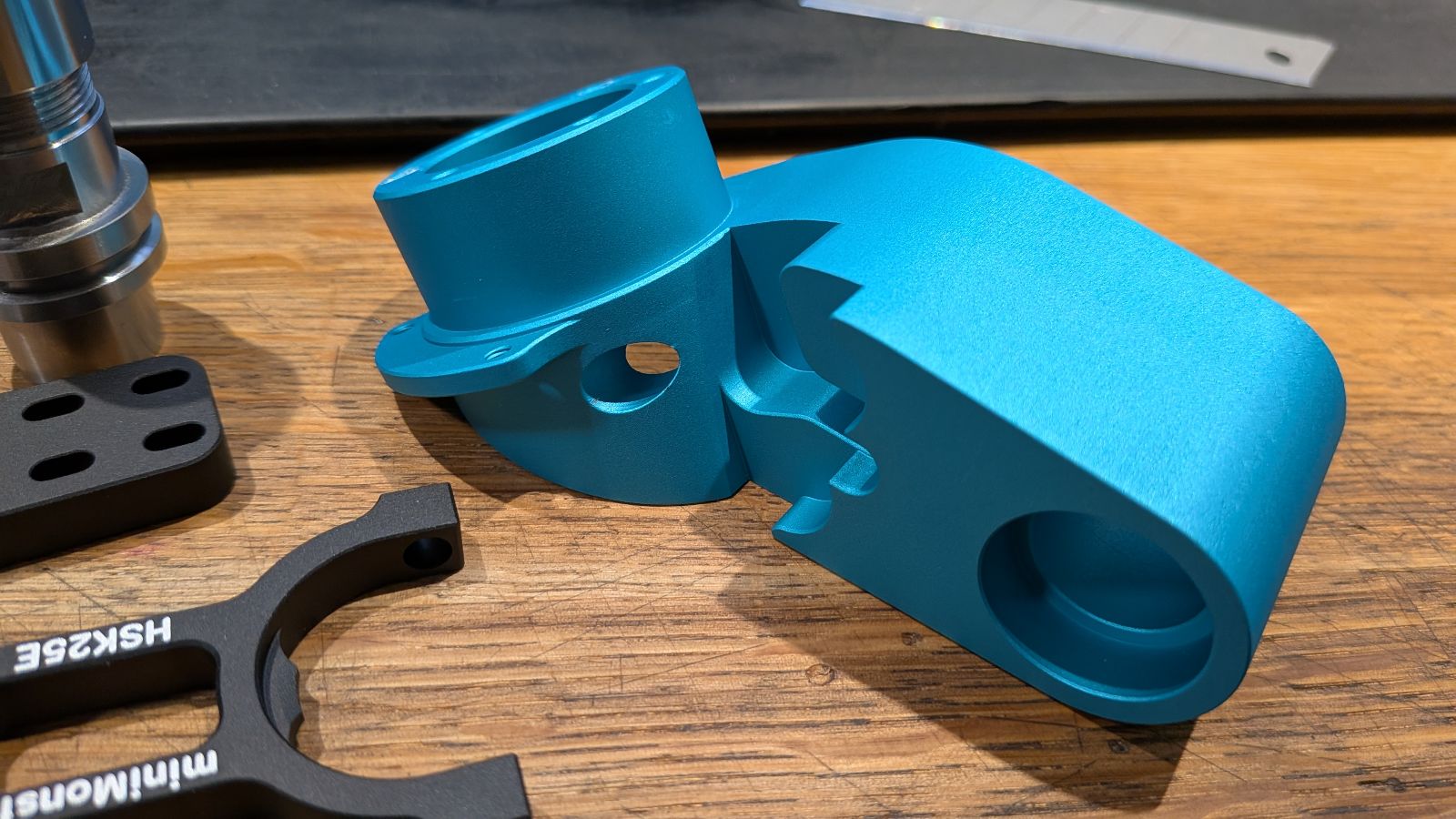
When the button is clicked, I get the following error message:
[img]data:image/png;base64,iVBORw0KGgoAAAANSUhEUgAAAckAAABLCAYAAAAbMHwWAAAAAXNSR0IArs4c6QAAAARnQU1BAACxjwv8YQUAAAAJcEhZcwAADsMAAA7DAcdvqGQAAClPSURBVHhe7d0HtF1FuQfwCUEiBEGQpiJFAUERG0XAAhhRQAQbRcClFMvi0Z4+fC7wPURZ6oOlzycoVQgsIAQFFVAsUbBQhICISA1NpAWBhCIBEt785p6BnZNzbs659ya54Pdfd69z996zp37z/b9vZvbsMcsss8wzKRAIBAKBwDxYrPUbCAQCgUCgDUGSgUAgEAh0QZBkIBAIBAJdECQZCAQCgUAXBEkGAoFAINAFQZKBQCAQCHRBx1dA7r3n7tZ/gUAgEAg8fzBnzpx0//QH0lNPPdW6koluzJi00oorpCWWWKJ1JaUnnnginXDiiWnSDben62Y8LlC+6oD8W07HhCcZCAQCgUA3BEkGAoFAINAFQZKBQCAQCEAdca2jrhlBkoFAIBAIdEImyyDJQCAQCAS6IEgyEAgEAoEuGPQVkCdmzUqz8hEIBAKBwPMBzzzzTHrsscfLqyAVPb8CUl4DAf/7GTM4Sc6YOTPNnPlI+T8QCAQCgecjhkOSMdwaCAQCgUAXBEkGAoFAINAFQZKBQCAQCHRBkGQgEAgEAk3UqcmMWLgTCAQCgUHxyB13pMfvvbd11h0vWX31tNQqq7TORg/6XrhT/i//BEkGAoFAYG7MfvLJNDuTSMV13/xmuu3MM1tn3fH6f//3tOauu7bOUlp8/Pi02NixrbNFhyDJQCAQCIwY7rzwwvSn//mf1llKb3v44bT+Y4+1zrrj0mWXTdctvXTrLKV3HX98WnattVpniw7DIcmx48aNO6xcbODzn/9c+bWRwKxZT5b/X6jwzbHbb789HXvssenBBx9ML3/5y9OLX/zi1t3AvwJ+//vfp5/+9KdF3rX/2D4s31/96lfpF7/4xXyfPf/889MFF1yQHsuK5lWvelVfaSwq/OAHP0hTpkwpymSNNdZoXX1h4Omnn05Tp05NZ511Vjr77LPTL3/5y7TUUkulZbOSv+uuu8o1x89//vP06KOPplVWWSUtueSSradf2JiW2/3Jk09Om956a1rnkUfKsUbWk8vlezTjYMcyuR+s1nrG8ddp09LY3C+WXnXVfHfRAUmOH7/UXP2ODFx11VXpLw88nKbPeqpFjO0k2efCncsvvzxNnDgxnX766enWXIHNj1r+85//TLfddls66aST0g033DDXvdEMuzI8nK0kZbvllltih6EOoNjvueee9Pe//711ZeHg4osvLgQ2ffr0Il+nnXZauummm4pwjyTIqnZv7tDRKzo9K8/HHHNM+s53vlMO/eLmm28uSvnOO+8cUjoLEvJ7yimnlLz6vf766wsxqmtKBGm80KAdfvvb35Y2WTp7Psstt1whwX/84x/pj3/8YzGaAGm6v/jii5fz4eKRTBx333136U+jCf/Mfeza3P6OMZMnp7X/+te0br5ej+UF6gEr56P53NpZr8449dQS7809DNeORvRNkhTVydnKoMBYWLXD61Q8su9///uFJEdakQUWHe6999705z//ubTrwoBtpcgV654CZ8TMmDEjnXHGGcU4G4xkPIu05NlzvWDNNddMm266afnt18Nbe+2153n2D3/4QzEmeSGXXnppyYd8jVYgjKuvvrp4uqdmhVZJ8oUMhgsjgPf4sY99rBzrrrtukbO/ZoJ44IEH0nbbbVeub7TRRoUoRwJ/+9vf0jXXXFOMpuFAH5g5c2YxIBmxwzG8EOQDF12UHjn66HKslvOH4EYCG+bjpVOmlHhnZm64L3PIUz0M244m9P0KyIte9KJnFRYL88knuw/HajiW9uOPP14sKAdi1QHdq4oDobpOufEY/C+sxve8NJpx+H/27NnPPl+VqnjrszWdTuHa0xBmMMiDcN3yVwXUr7y6XvNa8yHtmo8an9+a53oO6qOZjkOZXa9xgGvCiaOZpnP58Fuvue9a83n/17zUcOJ0reZXmSlQw25/+tOfSscUvubFb7Ntmuk4oNaJeGu5anm6QdiHHnqoWPAUFNIbP358+b85r1Ch7j0jbkqfwqeMeoFh0te//vVpxRVXLMMyoNzy7Fdea1s0yweGTtufBaR54IEHphNOOCG98Y1v7OiJkDvxN9u5vf4cVR7cV/9+ndc26Cb7rtd8Sss9cdeyCed8p512SkceeWTaZ599Sv8eDOJppuVorxO/2qLKRc2z5/rJs7A1j808V/nshPa0m/mrcYuLPAmn3V7xileU4dTFFluseJL028te9rJynWyQufb8OqRR8+KQhrS63fc8o+nXv/51+stf/lLqRZhO+kfZ3RNfrbMahzw4GK0XZXJj1EivtoGjVzyd47snG6N3Hnpo+kQ+d7yu3Bk5vD0f4t0q98s/fPzjaUbOr4VBow7Pdd8MdThQj32PIbz61a9Oq6++emkY4/l77LFHeu1rX9u6OzcoOcMZ5mx4mYST8LHMdt5557T88ssXxWJI53vf+17aeuuti6fAwmN9E1Dh/C+e6667roR/3eteV9J9zWteU5QPARbmhz/8YbriiitKBzBMsuGGG6Ydd9zx2TkgwuiefEuTEK600krpbW97W1E63cAzYBS8+93vLhYg4SS8FCFr861vfWt66UtfWqxPQzXmn+6///7SQVZeeeUS/8ezcFQFJD7zHbvttlspF2W+zDLLpI985CNps802K+VUZ7w3dSjvb3jDG9KHP/zh8lsV7mGHHVbyP27cuHTjjTeWunvJS15S6vGVr3xluWZISefRZu973/vKvUoyOprRAUNLwopH3U6YMCFtvvnmpV7V6Y9+9KMyFE2JXHjhhWmDDTYoFraw2kpZ5FnnNHf1jne8I22//fbPlpdHiGS1hfI61lprrbTtttumjTfeuIRpQrraCdSLNjfUqy5Z/p1AsVE80uIJrLPOOiV/veAnP/lJGRl55zvfmXbYYYdSD65dcsklRVbFq27Jr/KpQ7KgHs8888x05ZVXzvUsyLPyO5rk2QQy5ylTdORFOPGr/2222ebZdha/cjFSKEN1ot6E0xZk/5xzzikKmJLXr8j+hz70oVJn5IcHc/DBBxeZM/dO5oTdfffdiydMbjoReTvUA5lSN9pI3Nryve99b6mTGoe8mK9Vd+RM/yDbwvDYlFee9Vdth6yUiYwLK14y+fWvf73k2fAkuUESu+66a4mr0xyhtITjxZNN4WudkkvlNF2kjyoLmVa/b3/728s9+WUU6jN77bVXaf8PfvCDpT8xvPRv/Vy7GkUgC/oKItOW+od4yYG+ql60Bf1Ch5x33nlluFU9+V+Yz3zmM0WvNiEfkydPLuX51Kc+VeqMvjKSRw422WSTkmcesbKssMIK6V3velfaYostijGp/nrBDSedlMaeemr6SOt8QWKFfHwmH+ccdFBa7ZBD0mpZHz0f0NfCHQoVOay66qppvfXWKx2FcNeOqNOwkgiNjkPZ6QA6P2uaxY2oLrvsstIRPKtBCZUOg0gJo7DuISRkRiil+aY3valYdb/73e8KCVIG5hJYZCeeeGIRrNVWW60ICoIltIS3hqNMjjvuuKJEEayOJpxOIg/rr79+SVuemmAQEEQCiRiFQU6EnTIg4MhfWpSYjqdzqSP1pdMJT5B1HvHpINOmTStEisTf8pa3lE4nn5SY68osHmVSZ0jIfXUDFDRyoqzVzZvf/OaSJ/GrS0qEYlBGJEcpygcLGXRoikw7vf/97y/5pbgpVIuXEKv6NmJA2Sg3spcnZVaPFndQYJSB+5SBdtDm8i9vFDKlJU/an2zIqzi0Y4V21N5HHXVUyZdyyI/2IWuepzgpDvUtb8gTAf/sZz8rxouyaX8yKP5eFltQfAwS9Yx0KDDX5EHZkK36JUfq99prry2GEcJm8Ei3+axr+kJtO31D35FX8lPDKQfFh/TIovwqr/rWxtrKMwjbdQSDjMWhbfQVMmfRmTyQH+0tn7/5zW9K2Wo/MSxXR3+kSxbJnD6pLil9pIK0KHVp+J8sypc8A/nWxvovJY2A9FPxyzNZu+OOO4px5dmtttqq5Fl+a57FYe2C5/Q5Zdfn1BuQcfErO6IQn2d4e+SGnMpzkwiq96RfkQf1uuWWW5byMTTJjTwqs/oWn76pbDxo7an+9F06y++nP/3pUp/CIybtwKBQbvHqt8qjnegHxo7+zcBBaspHfsiJsOJxTdzqGPn7JSPVuKpw7lk6R/nlmzzSN+Qecetf5N3z2k8fV3bl1H+Fq0ZLN/wtG1+LZ9l8Y+t8QcKwpcU9l+d6vzfLyZh8kM2FAfqop4U71Z189t8hbnCuYJSijqbzUxoSbAcFRQhZOCw5z1A2hFOHJKhNUNaET1iKjtBSxDo6b6xaq0B4CAMip7gIh3xRjqw7aRJeCpqCYRkSOgTruvjFpxMQ4HYh7QbKQv54Qaw55UAKFIKOjgDcf8973lPipwSUUzkQTQWyQFo6p05FUVAC4JeCFY+yuE/okZeyNkE5VGLgKXqOEpSWjiUOBCiM+tLhoHrn8uAZeZWWOmeUICadmRKk+CglhoX45Bn5ITHKmeKqeUWUykZJN8uL9CkfSkbdSVM7NKFDU47qUBmkXckJ6VAo4pcfaah7XgHPRj3IB4WsLtT7cDugOJWTTCmfOuKhUnTIhuwNB8pa5d2h/Sg+9c9o0x+qnJAvSk+9IR5toF+QCV6mslLe2sCv9tKGZL8J7a4dlUWaZF8Ze4V0ah8g42STvN53333FiAG6gKxJSx5rnrWlPiKcNtOO2kueqzfLGGrKuDZAcjXPiE8dtXtKwpGv6umpH+HljzyoS4Ym4iVXCFsdKT+dokzIl75i9CM0ukEfEk4f9qx4yIB75MLzZFW69BpvWHnUjbjoHASLxDzHkKA39TN1Qma1azsYCtpRndGvjA6erDpSB/qIujSKJx/KqH+Im3HDgOYkDIZbs2OyXNaPXecfcz2k//7vlCurdaFH5D6aLYzWybwwT7lEJvtp2XDWl0YFOg/2FPRNkoQEoWhkjUV5UbaEoduwEgVJwCgWgkRgCJ3rFXX4QuNT6A7n4qRICLDOyMLVUSlgB0UlbcM38sWC5KHpaARKuhSMcMJQOOIjXDoDIddBmx5NJ9Qyy5/OrdPq/MhLGjqyvOqsCJnycl1+KH/3KbwKikln1RF0UHlpej3CeoYxoNNTCsqg/ppQJ/IlLvWiIyqL+tNpdHD3hEN61TChxCg2bSBuwiot7ctTQKbK457feiiLaxSStqcgKBThKXb5Ew6BNdtXPakzSlFb6syuNVGHvCkmBMpK58Upk7pRToaJ+lJGbclAkRfKR9sgHtAOwwX5IScO+aH0pFHbppNh2A/Uk/pWh+pOfYpT3nnVfpWTzCs/g48C1G7a0v2m7Gtbsu++etAmZL8JdUpuHWSEohVXP6h55rlIy3m9BhS8uiIrNc9k2Lm6U05tx8NSj/LsPrJQD9qzQt70UflFfPoeuVFm3j9yon8YbPq8+iCPyEpY/YrMIFZpVuNDvE2Zdk6ua100ZV0deV4/8rz09BVtpV1qXxIvqBeGgDi0Cb3n/2Zfkk6NX9nlX1nUFZnWj8iaPqyeJmePWtpkkb7yrHjIgF+yivj1Ff2I51yNlnZYODM9l2HGxIndF+kgyGxcp8MOS2nHHQlO68Z8kPt42mUXw5EpeyopV17rxnNAkutn43pONu5uycZSN5Bp9TvcQzzDwfwnITpAw1Dy5g80BktHRoyvVxAYgmOYjUVLkAiVBiQAFKh4KggNJV+tWg1PEICQNhUqQvWsNMRTFYqhFulVQXeNEPoVjsD6n+JReSCsTl3T6gbx6MR+wXPKLG+VsFntrHpDItKiEJRVuWsHqqgk2bTi5c0zhp14vIQcyYLOz4sSpgl5kocK5ZA39dW0UOXb9ZoP+UPm2k6nruUXv3AU0mCQL21JMX33u98t8Tc7LSXdzKv8GBYarJ4NSxu+9atNKQfD9/Lp8HoCxW4ezXATRSheYcwp8k4oEKMOFIZ2JitDhbYhk8oDyljbv5LZUKGdjS7IOyLRHoA0pFnbyf/KiqTNHRtWRprmP/W3SkydZF9dt+cRcXTyXHqBPCMmowTyro3UDfIRb80zw2yXrCi1hzzJGwPpox/9aFH88szg09Y//vGPS55rPtvz7B5ib+ZZX5YH3hVDgJwgB3Ow7pEJpFHhf2G0mXpu74vzg7QRrX6mLJMmTSpyxcDVNtpMuurG9EeVEeWQf7I4GHi4hmsN/YmXgXHIIYeUIVvGLaI0YuJc29NX4lYOfRB5Ild6ls7QL6wZYEx2wqNZT12cPb2P5bro+PYrXZvrMnfsgfP//V/Dgil9+9ss2YFrnaCNPve5lD772YHziy5K2eU2T6fRBq61YDHP4lmGLssy9eQeezyrt5pg4DT1/lCgzckb/hkqhkSSFYTHwhVWDtdegQgLsPQoLos6dGgCpdAUoEU6VZAqdLb2SqqoSqoTCBVlKMwnPvGJMvRAsJpwn0CxMIXTuetQoOvOKYDBoLJZ5bV8lQA9i3DdI6gUGWVAsCk4hEfAe0G1AL0+wGvae++9i9errnSaTgKjzrrVz2D1pi6QPEKpi6CaaFpfneKhdByI/oADDihKqkn48lXnTnuFIWdepk7/5S9/Ofe1zxblS4kgks9n61ScVQHqWIZV5Z2iRvaG/7/2ta8VUqHADHsNFcrdTSaHC2W0IIqXYcEWeVF/ZMXwXBPKUofkjU4IY3rBcGZVwGSfl96sc/nXzk0MJhPzg9EGxEbu5ZnsqB8reHmDTWi3D3zgAyVPDDxzkAjeM/JEli1Yca6fVMhfHQ2oaM+zPi/e6jXpH/qg+nMw4NQNowz8T1G6ZwRjKG1K5hiOiEp5kD+PUl2YzhC3IU8LDfWJJqpBDp3qH6l5hgctb8LznpXDiAzDm0HEe0WkiNJ9MuR1PDLh3LCx4Vv1p2/K05DwH/+R0v77t05acC0bP+W3G846K7Mf+mvANXFlg6YTGC3WRpgeo6dHGrxyByNnqBiyBtDYGlTjER7nxsyr50N4WVjOCatDeIxOGLpZc52ECLpdJ1AUBSFDMDqruCl53ofO4Vc4QyYIlCJldbFCKVaNRMkOBuWhqAmpZygyK1CRps7KYFBeFjKCkxYYSkGknaBMzXIhXnE4WIvVamRw1CHjTuhWN4OBElNvylVX8+lULFRtVtsRqvGjM8qLNlRez7vHQFJGykobi5PwNz0CaC9vO3TsSoAMKl6j+MWrfXkU2o9FX+PSzpQC+TIkx0DZd999i0ep7oaL+eV5qCCX2hnRI3llVefkkOKtID+Uo1GZqjyVl9EmX9rAQfbJszrXjmSljha0Y6jl0cbyrM5rnqUhz015IR8UuLxr05pnedGW8utZoxiMBEB8DFdpVEO0iWae/c8YYFCZs6OD9EEyoM8gRYtc1Fuds/W/NNuNuV6gjEaJlEn9MlqkryzaqvYleo03Kf/klh5q70vqQzmbfYnM87CVhfdnSFVb01NGGnjmFhEhQfqNsaGPATk3smIRkHlS+WB0eF7+hoRzz03pjDNaJy0wZHbaKaVvfrN1oQFGgWeyg5ItoNbFFo480sq41sm8UEfqkD4m452gr6ivfg8LqRjYnh8OhuVJAuHH0qwrVqbOC6yC2hmMtdcVk+YjKDvKYSSgc1GolKOKVimsL9fB0AXlSWES7voagk5Uh4mVQccZTHkQOMKnEyBJHZFyMC/LmyHIOqj74kao4tTwOlEvEJ5CQbKUh6Eo+SZI6rM55DRcIBqdStwU7GmnnVbqDMmxtpWpWuI6sDAUjc0iGAA8dsO/OnpdWFAJTdw6unC1HXoF5U5GtJWOzjigpNTLYDIjHe2jvtQfefT8aAUlSzYNWxp9MApB/pSfLFVQIAwzCrq2jzqh7JGDOja0Ru4M0WuLWufqwfxu01MbDvQz5Igw5Fk/Ij+OZhqUUl3NW4fRtKH5ZQeDx1SNPBs2Vb4arhqcg3kV6klf6UR2FsOQQ32UTItXH6Rz6iIc6fQDpIac6BZpeh65MdjoFnFKV/0bbmUcaAP5VGe1ncDIENmko0wfuG4RFHlvwn3Gp7wbRZB3umry5MnFqKVrOCdIUn01p1wGw0PXX5/unTQpbZrlbG5/vYHseeWOTiGl7O63LmbQBzYvN2d87LEpZ25gkY4w5i2byH24hLHLThfyUyNvzbIy1StQG26YHstl6gRGB6NA+XsBQ0Y/wjnaqTm6Mn9Uw/45LujrFRCKW+MjP4qzog7dEQ6NTfm6z2oSh85CmRIagqWjUcQ6hM7AAiMMhjLcEx+rs1quFDIhJ5wqjLJ2TgkgIB1BnhA08pKevAhLuVL20hHOuQp3n7KRb0NylJH8OHSyJnQ4gsnSE17FC09QDbV4hpJQN+LWoRAowlBeytB9CqIqfuVCJMpQ0xMeYeuU0jDfpw50QmVgcOhUlbysLNUJpS8dUJfiF4ZVWq1JdeJ/eZEmaAMdTBoUnzRZveqKIqvkXvMnzzq4c/FoKwKoLsSvDcWljtzXRupEvBSn8pKLTsqtQtmRpHzxFJw7lFHbVQLoBjJGTpSB/PUC6ZE3+VMm9dTpGjJQB8rDMNQe5EinbIZrvgIiz66pH1D3VcZBffEAxanM6owsa09h5YE8UZri0Lba3PSFoTXxiI/sy4swZM+5eMiLuqhyqU7FS87awRBC1oZ+ybY+q620mTR4POqAjFUFJG5pKKf6EJYMGZrVb8iL/LhnSA1heEbe9E9xkHPlErd01YG0yIx05Fn6nfLcDnWDMORRvapfdUknGa6uoxDSpZukpV9X1KFZ4egd/VUbkG3DdupXPbvuOeSoDaThmuf1JXWnzvV7fUm+gEwqp/IK45zsVHmoUH/yL15zre7ra+KUP/3AMK26HKw/teOeTOR3ffvbafvZs9OgJjdiy/olKxGe0MA8JWQZTVtsMXBPnpHjgQcO3KtAkOefPzA/mXVDNyjxMrlup1pglNNZNev/5uiPstHZ+r+2IhP1lTfh1EHz0Kbah6xpM7KjPbQlfdTbKyAt+L+cjomvgPQCwxsWp5gH8SJztQoDoxvIyxC2TtYJyBShNzvOSOAb3/hG8bL23HPPQqY6tzQo59EICojCsHjESIGhPcq/F1IKPL/gtY/bv/jFsgPOvCscuuC881L2JCxUaF0YBJnE08knp7Tvvq0Lg8OWIcf5J3ujG2aHg5GEGIGhzyBnmDqQpnlf72rTw82RIobZ8ccfX0Ymzj333GIc1XerGReGqgf9CsjMx7uS5IJZlfACBaUbeP6Axc5SNEfZfuy///7piCOOKB7aggCvzaYIFtSYv0ZCoxXeqTvooIPKpgQs8EBgLuy9d0o9Lj4sc5D/9V+tk/5g+N3o2PxgF6ajjz66dTaATtdGBvGprJ5g2MgwlCEiw0XtQyOB0QmeG0uUdWoIsXmYzzGnWq3VkQT5MKdrOMyQqGF23uRo9SQNVRkurZsxqBfDhCPtYQcWPcxJPjxlSjLA3POqEEOmt95qfDKlwVaJZkMrTZ6c0t1zb3gyGCypmeqf3CdnZ8/Q6IXhUmgOtzr0U8P5hqK9ZmfY2zD6oYceWnZDIr9WwBtCx139D7e62uqjDU8ySLJHUBoIklI1RBcY/UBK5nwQQKfDfM9IEyTo6IjZPJrOiTQN7Y5WkqSMTCHIr3zX+Z7Rmt/A0DEkkoT77x/YYKB9gU4T//mfA3OVfaBJkuY7rb8YjCTpX/3JfK2FUoZVjYQgSNMbjLzmwp1hk2T+jeHWHmChgxWEJvLDiwzMD4woi3DqoaOPZsKRX4pEXv0GQQbmQTag0rrz+YAWoste3IIGfcyYszjLIjkLB+u1kcVAHwiSDAQCgUB3ZMOprFTlKQ6GE09MaY89BnbnWUCwstdn3bzeYyMKr8kZ4bNBjcWV7o80giQDgUAg0B3Ib7fdWifzgR15Dj+8dTLysAuZ3Y7s+PStb32rXPMFKB8H8J6+BWgjjSDJQCAQCMyLupPOhAkD70Q2gYzMT/7f/7UutLD8IDvzjAC8f2zqy5aG9d1Tawt84Nz2p9497RveWhjkzYVYuBMIBAL/QjDTNv2mm9Jys2d3f1fSTjo2Cdh9dzsgtC5m2CjgqKNSOuWUlKZO9eWFgevmIyuWXTYl84NLLz2wkKfLhgI2JLwqh7lns80GCHmJJea7cAd8As3q8SYQpfchPeteXwt37nswTX8i89xYPmNZrdP68RsLdwKBQOBfBsutt15aZZdd0qXjxqWHW9fmgUU6PnfV3JIO6k46X/7yc1vNXXPNAGn64kdzPjCTVvnMls9ttTy+diDJqYjUDj5+B4EVq3Zosketndn83354dckwLPLr65322c+kZ/IxtzeJJQfwvCVJO6nYoslOC14a76dShPXStFVR9pR0qGTWivjc66uShwn5l7ZJZ+VamGkHAoHAXNhrr3m/AmInnXPOSWmffVoXGpg2LaUtt/StO8OPrYstmDfcaqvWyeDg5dXddpqout57kb0ctkGkT+nVXvDMnKxvZ+ewfjvgebstnRf8baptvz6TtfYZ9S5aL0CCvgxguznbFmmc/fbbr/xv7z8vm9vPtZ89EYcDadow2nLmww8/vAwdLKy0A4HAvxa8Kzlljz26f0/S/ql77jngIVZYjGP+MRNQV9jr+atfHXi2YtttU/Jh5Q5Drpfl4+c8zpbHai9cw6L1PfS60YchUdvN9Qt6nlc5v23pzrz65nTdg4+mMUuMTenF9oYeGGatQ66L1JM0XozsfOGgX/D87OfHcujX+/LlBR+E5Uma7OWi28nBjjoayYRwr4Q7EtCQdZP3vocKAoFAoA+MX3XVtGkmwKvWXjvd2Lo2F7JeLTvn1JWihx6a0sSJgxMkmJ/kOSLT224bWNiTDf9OBHl5Pq5eZx0TjAMXMpBjJcgKX5ByGOHr96BLe0b2Ip8p3uS83uciXbhjrz77WiqQl0H7AXL0OSpDlD5XVXc16QU+ecM6QYa+xeYLE6wNcfDieKV2allYL1QjSMTt6yY+Yi0fnYYdAoFAYLjISj8ts8Ya6dHspT2c9ejT2ThfoXXvWcycOUB05hlPPTUlX+roBVaXIss77hjY77V9+DXjynxcte666f6NNhqY/2zBrk/Nr4AAPQ++LjWcQ7xdF+7c+2Ca/njmuazvi85fPIdpeJJ9Dbfy+IzzcoGRE3ID+1L67FItoMR5iQoojGfs2F7DIDNLeQ2X+vSJFUnIQTwqys4fTXCbjTOLD3HbEcR2RL7s7rohSvv1Sad6l9KVDsJBgOJ232d5zjrrrEKUPEfLieVJHsRlftK2YtWb9HkwZfW8X2Pj4kGiymO7OuGUWZ4sQRbONauqrNaqYYAHrG7qp3SQoV/DCbZZOuaYY0pZ2i2qQCAQGGlMPeKItGQmwUE2mxtxHJuP+3iZjU+U1W0/68rWkQbyG3S49YHMc4hx7GJpzFI5zFgkOXD05Una6eDiiy8uRHPeeeeVD4D6qr+5PKRhqBJ8K43StyuCMBdccEHxGA0j8tTgnHPOKZ/m8Y0237ET3pJd+0fW91/qsKP0hPXSqM+gIDhDrMIrfPUkkeOUKVPK534QoS9T2+PPUmJxqhT7/Mkzr81h2JUnx5tEupMmTSpx+zgqAvNh1LPPPruQrzlM/yvP9ddfX8hamYUTh0+zyOPp2YLyRXE72iNH35PTOMpjDlVZ7RChbmzUizTFr97CkwwEAgsL06+4Ii2eHZU1s5G/oDWOgUx+5dVZFz5mi7usk+lvetSeq5yZBQXp9OJJ+ubyGK+CcGoWGwJJIiBfw+Ax+diw+TwWAJLjcZl45TGeccYZhSR4UZ/85CfLt+k84xt7SMIeqIZXeZPIY+utt05f+tKXSjheVJMgeG2Iyle6kY2XSH2jT+GQEC+wkqTviSEqHqKFOD5Me+WVVxYyFaelwz5wqly8U/n4yle+UsJxyYW1iMYegD5Y7BlfWLegRr5N/m6//fZlQtmHVRG/L4bzMi28YTj4/+CDDy670yufIWXwJQhlsY0SwkfcXoC1tZK5SGkj1CDJQCCwsLBc1kuPZX0zNeu4DVrXFhQMnJ6cj4d32SU9Y5g1ExZdN2HChDLqVkfbFgR6JsmBMdaUFs8eZYskO+aKMndYGlt+swdUvTrKHdEgAe4x4kBKvDhEiRh4hzxLpFc/S7TtttsWIkJshm1VijCGbhGdrzK43xxm5NGJzzf/DIFKCyk5EJt0QWF9AV264vUFdC+UIm3vzvDyDOtqBGlpGOn6lS4yH4yUxInUlVmc4udp8vyQqkO55EOZ3ZOusIwAxgGoI98Z1GAMA+VQN5tuumnxZAOBQGBhYlzWq6tss01a8YtfTJPyuaPjYp5hwCId8f40pzUjE+ScrHOzYiz36GTTa03yWuSYPSeNefq5V0I6kmQlxfYDkAxyQmjIwxiya3VOjleEPFyj+JEqMuLFecbQouFT5Iss6qGSVJj/K5AkYhEvIhOfuBCm/+uwrHDm+MSNsHiTEydOLMO9hkV5kvIl7ppG/b9Tuu3gHfJiDRVL36+ySNf8Iy9TmRE6QuT5SpsXKj/KC8LIo3rjWYpL/YgbWQcCgcDCxvisw1febrv0on/7t3RX/r1i1VVTfx+86g6LdK7Ouv/GLbZIt2fHpnxJJDsoQKd7q2D0oMUB+A5J2mAgoyNJPjFrVjmeysQHTaLk6VHyFZVg3EMahjIRIPJpemfGnZ0Lh1D99gILXcTn2eakq/+b8dcNABCRlaKGhR1e87BadTgkJO+snUqkTVJVZmnLIzI39FzTRp6MhfoJF+UWXt00PWbxOwKBQGBRYMkVV0xv2G+/9Mrddkt3b7JJunKFFZL1rPWYKVAPeDAfzecuyQR8ny3r7KrT2LquOh79vtWw0FB24RnwJjuS5PTpD5Sjrl5tAjlUUmwnOuSBFOrqV6tFkYIDYSAR96wKbZIrgqlHM05heI0IBdkhwBofj8y1Gk66iNPQpflNC2hOOumk8nvccceVucyhQj6bxNgOHqG5WEO8X/jCF9IJJ5zwbNrmSX05uxnOAiIeci1L3fUnEAgEFiVM/6y5887pzgkT0unZMZiY9bXjmmzYP5Hvz++4NDsu9RnHQzvskLK7mO8M6NHqENCVo3qKCQ8Vb3LOyG4mgEgsvFF4c4QWs/CszEFasHLzzTeXoVr3EZo5Sa8/WB1rSNJwJU+0gqfolRCHMOIzpyceK015jDVctUosqJGWeUxDrMKbq/T8ggJP1bABI8CqWmVWHmnKo3MwTMujtZLVKt1aFqtweZ6BQCCwqGFq7H0HHJA2P+20gd1w8nHJBhuUVzfmd/x5882ffaYc2SGq4D36pJUDT4x68CafmtN5datvdnWCFatIzWsP5tTAEGJdFWqRDhLkKfIKEYBXHMzN8SRZD3ZwR2jVi+RRIZKrr766kGSd46xAgJVMzS/afcEiHJXsmjgsluFxWmkrXrv4mJdEPvLGIxYnsgWbECAw84qb2YG+hTqH2L661TUErMyuKbO8yLOVtupDXIjfayXK7NUSzyJq+VJmw6w8aXVjoY9XWa699tpSPt6yuojVrYFAYFGC7lliySXTuGWXTStknTkjOy6P5fNZ2RGY5QsbgxyzrVqlv7OeK0d2nIB+tJCRLqQn6cKFCbzQ2+rWFsr/+ch/fZEkIBCeYPOdFgkjICSCjOoL9IjLgfgQJEJhpaikgUyPL+GRqvgQiaNuJiCMQxzirGF5YxtvvHEJ671KcSIZYRw1XQ0jLC/PaxuuVfDqPNc+V6kc69kpP9/nGTevrdzaYAD8OreKVd6VV97ksb6X6Tn5Q6KVwBFgDecao0Ic8uJ/5IxIazqBQCCwKECv01d+l8u6bCWLDbMue5Buyjqs45HJFOgwOo0OdtCFC2qjgF4wZJLMR8cdd3hCTUigX3R7pt/rgUAgEBgdsHbCaN78wNHhFI0W4Jf577jTcEwKH+XDXy8k2UQ/ZDYUQgyyDAQCgcBIYjgkGWN6gUAgEAh0QUdPctq0W1r/zYvh+3lj0pw5s9PDM2aWBSztCE8yEAgEAiOJEfckxy+1VNfDSszhHUuWSd0gw0AgEAiMdoy64db2DQoCgUAgEFhUiDnJQCAQCAS6oOOcZCAQCAQCgfAkA4FAIBDoiiDJQCAQCAS6IEgyEAgEAoEuCJIMBAKBQKALgiQDgUAgEOiCIMlAIBAIBLogSDIQCAQCgY5I6f8BLPgiJPdiBhQAAAAASUVORK5CYII=[/img]
A close inspection of the error has [laser] rather that [LASER] which would account for the message if usage is case sensitive.
Otherwise, I have no idea why the ERROR message is being generated.
Also, before I tried to combine both the offset moves and zeroing the DRO, your guidance to home the machine, turn on the laser and then jog to the desired location worked like a charm. However, since I've tried to implement the oword macro, the machine is back to not allowing jogging with the laser on. No idea what may have caused that!
Any guidance would be greatly appreciated.
Regards,