Search Results (Searched for: )
- mrgksworld
- mrgksworld
05 Mar 2026 15:48


- PCW

05 Mar 2026 15:48 - 05 Mar 2026 15:48
Replied by PCW on topic Trying to set up position control mode
Trying to set up position control mode
Category: HAL
- Hakan
- Hakan
05 Mar 2026 14:01
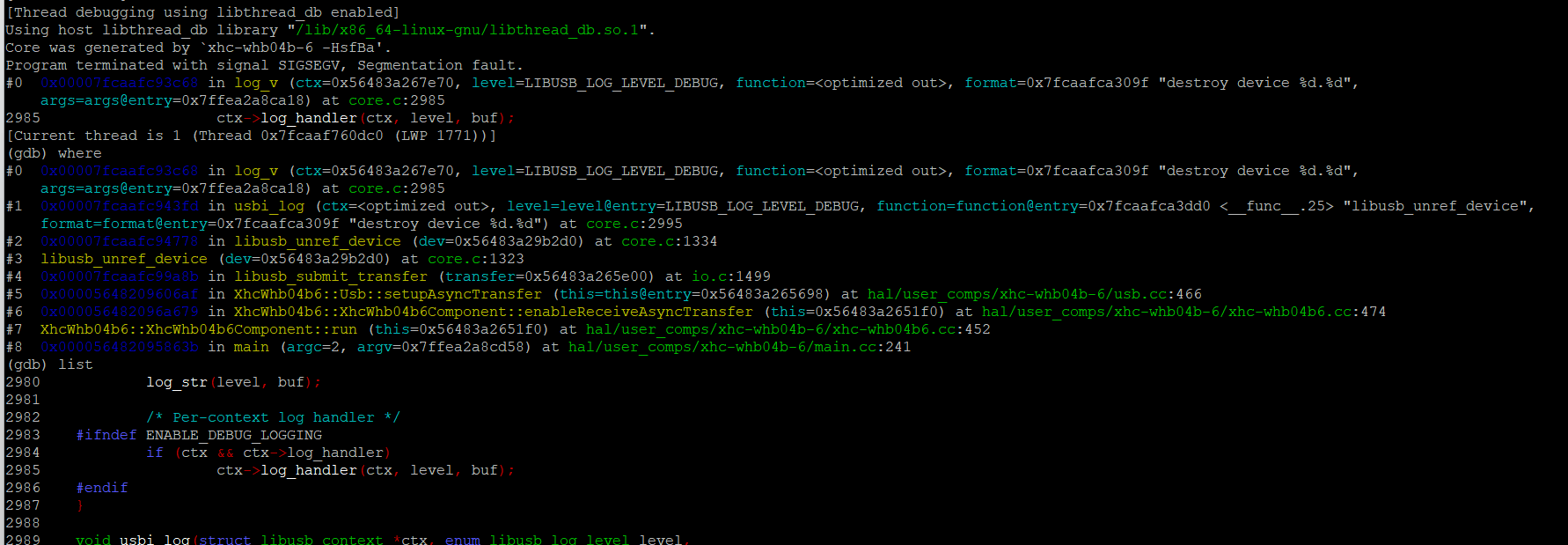
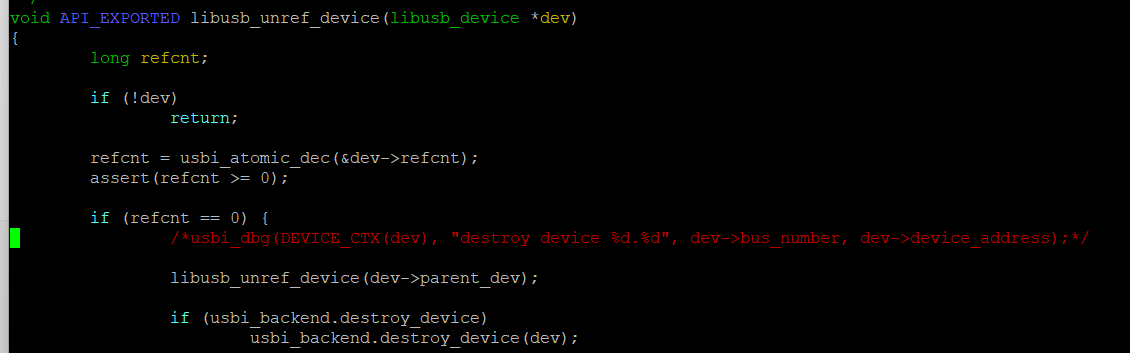
Replied by Hakan on topic XHC WHB04B development?
XHC WHB04B development?
Category: General LinuxCNC Questions
- Lcvette

05 Mar 2026 13:39

- T_D
- T_D
05 Mar 2026 13:36
- RotarySMP

05 Mar 2026 13:00
Replied by RotarySMP on topic chineese mesa 7i92 custom bit file
chineese mesa 7i92 custom bit file
Category: Driver Boards
")
- meister
- meister
05 Mar 2026 12:27 - 05 Mar 2026 12:29
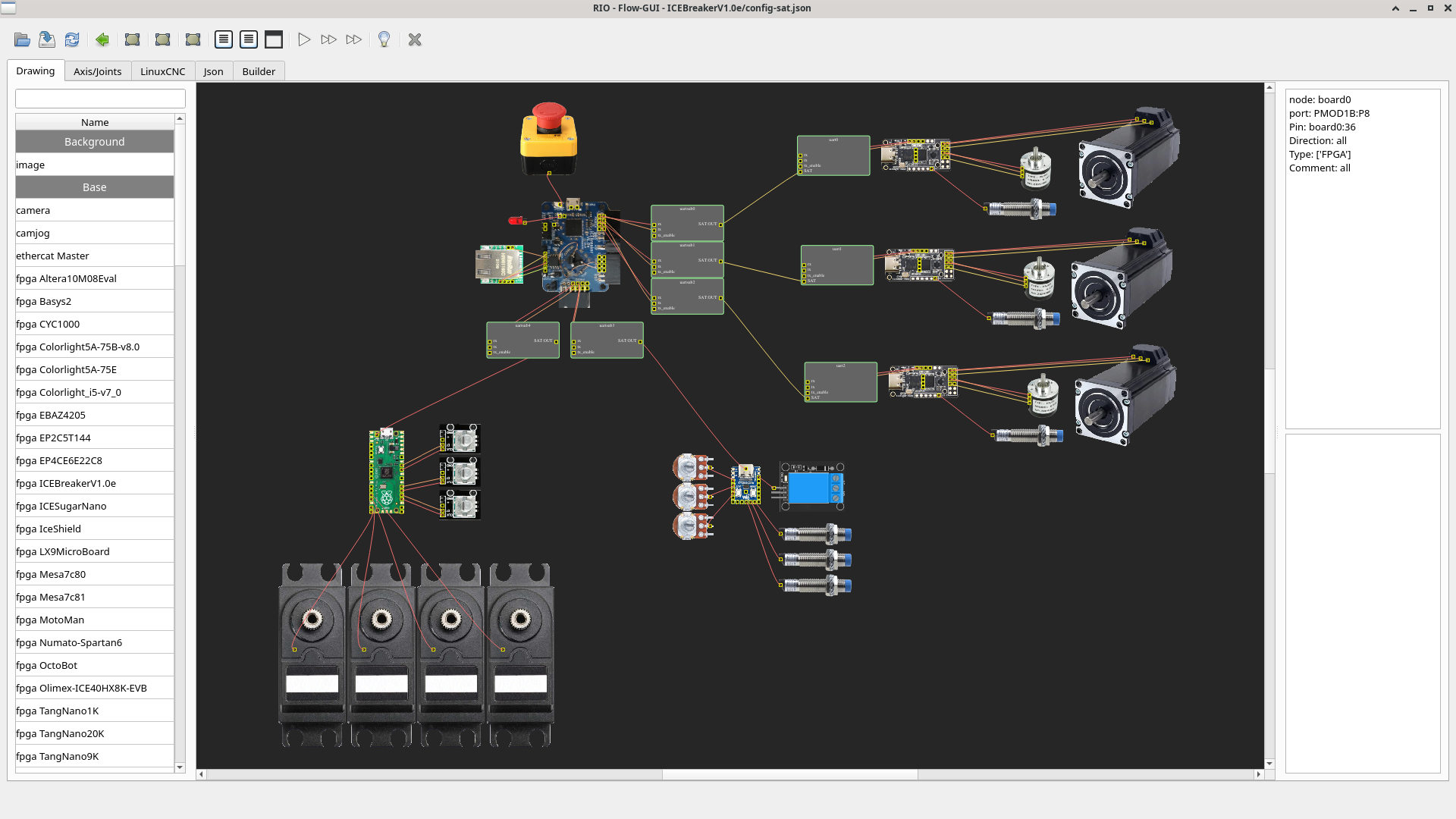
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- ClarkSavage
- ClarkSavage
05 Mar 2026 12:17
Replied by ClarkSavage on topic 7i92T and mx3660 request for help
7i92T and mx3660 request for help
Category: PnCConf Wizard
- meister
- meister
05 Mar 2026 12:09
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- epineh
- epineh
05 Mar 2026 11:49
Replied by epineh on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- jblanscett
- jblanscett
05 Mar 2026 11:12
Replied by jblanscett on topic Trying to set up position control mode
Trying to set up position control mode
Category: HAL
- DerKlotz
- DerKlotz
05 Mar 2026 09:52 - 05 Mar 2026 09:58
Verdrahtung Leadshine DM856 Ena+ und - bei Mesa 7i76e was created by DerKlotz
Verdrahtung Leadshine DM856 Ena+ und - bei Mesa 7i76e
Category: Deutsch
- DerKlotz
- DerKlotz
05 Mar 2026 09:13
Replied by DerKlotz on topic Add Buttons in Probe Basic
Add Buttons in Probe Basic
Category: QtPyVCP
- Muecke

05 Mar 2026 09:01
- mh300
- mh300
05 Mar 2026 08:19
Time to create page: 0.526 seconds