Search Results (Searched for: )
- Lcvette

26 Sep 2025 16:08
Replied by Lcvette on topic QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
QTPYVCP+VISMACH+LINUXCNC ROLLED INTO ONE?
Category: QtPyVCP
- Lcvette
26 Sep 2025 16:07
Replied by Lcvette on topic Carousel don t stop when estop is pushed
Carousel don t stop when estop is pushed
Category: QtPyVCP
- Lcvette
26 Sep 2025 16:07
Replied by Lcvette on topic Probe Basic ATC Setup Problems
Probe Basic ATC Setup Problems
Category: QtPyVCP
- SvenRSA
- SvenRSA
26 Sep 2025 16:03
Replied by SvenRSA on topic proudly presenting a Maho MH700 retrofit ..
proudly presenting a Maho MH700 retrofit ..
Category: CNC Machines
- andypugh

26 Sep 2025 15:17
Replied by andypugh on topic LinuxCNC RT blindspots (I2C and UART/Serial)
LinuxCNC RT blindspots (I2C and UART/Serial)
Category: Driver Boards
- kb58
- kb58
26 Sep 2025 15:03
- PCW

26 Sep 2025 14:58
Replied by PCW on topic Going from Devian 10 to 12 has created problems
Going from Devian 10 to 12 has created problems
Category: General LinuxCNC Questions
- jcbryant
- jcbryant
26 Sep 2025 14:00
Replied by jcbryant on topic Going from Devian 10 to 12 has created problems
Going from Devian 10 to 12 has created problems
Category: General LinuxCNC Questions
- tommylight

26 Sep 2025 12:42
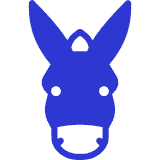
Replied by tommylight on topic Firmware Request for 7i92 – Plasma CNC Build
Firmware Request for 7i92 – Plasma CNC Build
Category: Driver Boards
- tommylight
26 Sep 2025 12:42
Replied by tommylight on topic lcec and Operation not permitted
lcec and Operation not permitted
Category: General LinuxCNC Questions
- andypugh
26 Sep 2025 11:41
LinuxCNC v2.9.6 Released was created by andypugh
LinuxCNC v2.9.6 Released
Category: LinuxCNC Announcements
- jpg
- jpg
26 Sep 2025 11:22
Replied by jpg on topic G33.1 synchronized tapping problem
G33.1 synchronized tapping problem
Category: General LinuxCNC Questions
- Ri
- Ri
26 Sep 2025 10:19 - 26 Sep 2025 10:23
lcec and Operation not permitted was created by Ri
lcec and Operation not permitted
Category: General LinuxCNC Questions
- souh-hil
26 Sep 2025 09:57
Replied by souh-hil on topic Firmware Request for 7i92 – Plasma CNC Build
Firmware Request for 7i92 – Plasma CNC Build
Category: Driver Boards
- Korre
- Korre
26 Sep 2025 09:03 - 26 Sep 2025 09:09
Replied by Korre on topic best practice Benutzervariablen anzeigen und speichern
best practice Benutzervariablen anzeigen und speichern
Category: Deutsch
Time to create page: 0.367 seconds