Search Results (Searched for: )
- Uthayne
- Uthayne
Cut Recovery Not Consistently Triggering
Category: Plasmac
- tommylight

Switch to teleop mode while unhomed bei MDI cmd or try to start nc code
Category: AXIS
Never even noticed that happening, so thank you for poking around and reporting back, maybe someone more into the inner workings can shed some light on it.
Thank you.
- tommylight
Questions about milling machines with linear scales
Category: Milling Machines
If analog drives, tuning might be loose, so adding more P term could help.
Same goes for steppers with scales.
- tommylight
QtPlasmaC SIM Estop Label
Category: Plasmac
- tommylight
Homing of Z Axis is skipped
Category: General LinuxCNC Questions
Also, home sequence for Z axis is usually 0, not 1, so it homes first and goes up as not to bump into something while other axis are homing.
- tommylight
Retrofiting Scm record 220
Category: CNC Machines
That would have to be confirmed, so a manual would help.
If all other drives are step/dir, that makes things a bit easier, but the X issue must be fixed in the drive or it might just be interference from dangling cables.
I do not know what uc300eth is, but if it is for use with mach3/4 i would really, really avoid using it, seen to many machines left crippled by such retrofits.
Get Mesa boards, namely 7i96S with 7i85 and add 7i84 as required for IO, they use a single network cable so you can mount those on the gantry or near the spindles, makes wiring much easier.
Fixing old controllers is ok if something small is gone, but anything bigger and it costs much more than retrofitting it.
Also, do not solder the battery to the controller board without a properly grounded soldering iron.
- mkudlacek
- mkudlacek
Homing of Z Axis is skipped
Category: General LinuxCNC Questions
I have CNC router in the making. Everything is moving, wired properly and all homing switches are signalling correctly (checked via HAL meter).
The problem is, that when I start homing sequence, the Z axis just homes immediately without any movement. Everything goes green and sets the correct Z height, as it would touch the home switch (170mm in my case). Other Axis are working just fine, as the rest of the machine.
I generated the bulk of the config with PncConfig, but didn't include the Z home switch, as it wasn't connected at that time. Now I went through other axis and copy the missing nets - mainly home-z to the Mesa's input.
I must have overlooked something. Can you please check my configuration? Thank you very much in advance.
- Dougal9887
- Dougal9887
Machine On button.
Category: Gmoccapy
Reading that document, now from a different perspective, makes sense.
Dougal.
- freemoore
- freemoore
Axis Modifications
Category: AXIS
I tried installing the axis mod for spindle speed/feed per tooth etc. and found the following:
I followed the instruction here "1. Replace files(axis, axis.tcl and glcanon.py) in existing installation LinuxCNC v2.8.2, begins to work immediately."
and got the error 'option values must be strings'
traced that to lines 3100-3103 in the 2.9 branch of this code on github, each of which has False as the last term.
Added quotes to make them strings e.g.:
vars.show_spindle_rpm.set(ap.getpref("show_spindle_rpm", "False"))
and axis now starts without error. Haven't got the mod to work yet but still working on it.
- C0bra
- C0bra
Retrofiting Scm record 220
Category: CNC Machines
But have idea.. What if could just tilt it with one potentiometer to desired angle, in that case could still use it to drill holes at angle with drilling unit and cut board at angle.
Also could cut fully at edge of the table since my Y axis now has longer travel than width of the table.
Machine came with 3.2m x 1.55m travel but there was some distancer on Y that has limit travel to about 1.25m which is width of the table.
Now I took off that distancer and its free to go, just need to move that limit switch but it already have a place designed at 1.25m and other at 1.55m.
So think I will use both limits with a switch to chose between them so sometimes can have better travel.
- FedX
- FedX
Installing older version of ProbeBasic on buster and linuxcnc 2.8
Category: QtPyVCP
But i struggle to install a compatible version of qtdesigner and QtPyVCP..
i installed python 2.7 and the basics:sudo apt update sudo apt install build-essential python2.7 python-setuptools git python-pip
now the qustion is which version of QtDesigner and QtPyVCP is compatible with buster and linuxCNC 2.8 and how to install it ?
found this script: raw.githubusercontent.com/LinuxCNC/linux...igner/install_script
at least Qt5 designer works now.. But still struggling to get my UI
in ini i use DISPLAY = probe_basic and i copied my probe_basic folder with my configurations to usr/share/linuxcnc/probe_basic/ but it doesn't find the UI..
I also found a folder qtpyvcp in my backup directory. Am i missing something? I set it up some years ago and dont remember how..
- rodw

Hurricane Milton
Category: Off Topic and Test Posts
We get our share of category 3,4,5 Cyclones here but the big ones hit a fair way north of me.
But I am certain we have never had the government led fiasco Helene has triggered for the clean up.
Take care. 3 m storm surges are truly terrifying for sure.
- unromeo21
- unromeo21
LitexCNC: firmware and driver for 5A-75B and 5A-75E
Category: Driver Boards
many thanks for the great work you are puting into this Project.
I have some issues, maybe somebody can guide me into debugging it.
I bought a 5A-75B V8.2 and managed to flash it without issues using a Raspberry Pi 4. The JSON used was the example from the documentation , 5a-75b_v8.0_i12o14p6s6e6 . I have not made any changes to it yet, as I just wanted to test the whole process first and see if I get into issues down the road. Now, I don't know if using the json for version 8.0 is causing the issues that I have.
The board is pingable over network, and can also be loaded into halrun:
halcmd: loadrt litexcnc connections="eth:10.0.0.10"Note: Using POSIX realtimelitexcnc: Loading Litex CNC driver version 1.2.4
litexcnc: Loading and registering default modules:
litexcnc: Registered module gpio
litexcnc: Registered module pwm
litexcnc: Registered module encoder
litexcnc: Registered module step
litexcnc: Setting up board drivers:
litexcnc: Registered driver eth
LitexCNC-eth: connected to board on '10.0.0.10:1234'
litexcnc: Setting up modules...
litexcnc: Reading 36 bytes
litexcnc: - Watchdog
litexcnc: - Wallclock
litexcnc: - gpio ... done!
litexcnc: - pwm ... done!
litexcnc: - encoder ... done!
litexcnc: - step ... done!
litexcnc: Creating read and write buffers...
litexcnc: Base addresses: init: 00000000, reset: 00000044, config: 00000048, write: 0000004C, read: 000000C8
litexcnc: - Write buffer: 124 bytes
litexcnc: - Read buffer: 116 bytes
litexcnc: Exporting functions...Show Pin works :
halcmd: show pin
Component Pins:
Owner Type Dir Value Name
4 s32 OUT 0 5A-75B:V8.0.encoder.00.counts
4 bit IN FALSE 5A-75B:V8.0.encoder.00.index-enable
4 bit OUT FALSE 5A-75B:V8.0.encoder.00.index-pulse
4 bit OUT FALSE 5A-75B:V8.0.encoder.00.overflow-occurred
4 float OUT 0 5A-75B:V8.0.encoder.00.position
4 s32 OUT 0 5A-75B:V8.0.encoder.00.raw-counts
4 bit I/O FALSE 5A-75B:V8.0.encoder.00.reset
4 float OUT 0 5A-75B:V8.0.encoder.00.velocity
4 float OUT 0 5A-75B:V8.0.encoder.00.velocity-rpm
4 s32 OUT 0 5A-75B:V8.0.encoder.01.counts
4 bit IN FALSE 5A-75B:V8.0.encoder.01.index-enable
4 bit OUT FALSE 5A-75B:V8.0.encoder.01.index-pulse
4 bit OUT FALSE 5A-75B:V8.0.encoder.01.overflow-occurred
4 float OUT 0 5A-75B:V8.0.encoder.01.position
4 s32 OUT 0 5A-75B:V8.0.encoder.01.raw-counts
4 bit I/O FALSE 5A-75B:V8.0.encoder.01.reset
4 float OUT 0 5A-75B:V8.0.encoder.01.velocity
4 float OUT 0 5A-75B:V8.0.encoder.01.velocity-rpm
4 s32 OUT 0 5A-75B:V8.0.encoder.02.counts
4 bit IN FALSE 5A-75B:V8.0.encoder.02.index-enable
4 bit OUT FALSE 5A-75B:V8.0.encoder.02.index-pulse
4 bit OUT FALSE 5A-75B:V8.0.encoder.02.overflow-occurred
4 float OUT 0 5A-75B:V8.0.encoder.02.position
4 s32 OUT 0 5A-75B:V8.0.encoder.02.raw-counts
4 bit I/O FALSE 5A-75B:V8.0.encoder.02.reset
4 float OUT 0 5A-75B:V8.0.encoder.02.velocity
4 float OUT 0 5A-75B:V8.0.encoder.02.velocity-rpm
4 s32 OUT 0 5A-75B:V8.0.encoder.03.counts
4 bit IN FALSE 5A-75B:V8.0.encoder.03.index-enable
4 bit OUT FALSE 5A-75B:V8.0.encoder.03.index-pulse
4 bit OUT FALSE 5A-75B:V8.0.encoder.03.overflow-occurred
4 float OUT 0 5A-75B:V8.0.encoder.03.position
4 s32 OUT 0 5A-75B:V8.0.encoder.03.raw-counts
4 bit I/O FALSE 5A-75B:V8.0.encoder.03.reset
4 float OUT 0 5A-75B:V8.0.encoder.03.velocity
4 float OUT 0 5A-75B:V8.0.encoder.03.velocity-rpm
4 s32 OUT 0 5A-75B:V8.0.encoder.04.counts
4 bit IN FALSE 5A-75B:V8.0.encoder.04.index-enable
4 bit OUT FALSE 5A-75B:V8.0.encoder.04.index-pulse
4 bit OUT FALSE 5A-75B:V8.0.encoder.04.overflow-occurred
4 float OUT 0 5A-75B:V8.0.encoder.04.position
4 s32 OUT 0 5A-75B:V8.0.encoder.04.raw-counts
4 bit I/O FALSE 5A-75B:V8.0.encoder.04.reset
4 float OUT 0 5A-75B:V8.0.encoder.04.velocity
4 float OUT 0 5A-75B:V8.0.encoder.04.velocity-rpm
4 s32 OUT 0 5A-75B:V8.0.encoder.05.counts
4 bit IN FALSE 5A-75B:V8.0.encoder.05.index-enable
4 bit OUT FALSE 5A-75B:V8.0.encoder.05.index-pulse
4 bit OUT FALSE 5A-75B:V8.0.encoder.05.overflow-occurred
4 float OUT 0 5A-75B:V8.0.encoder.05.position
4 s32 OUT 0 5A-75B:V8.0.encoder.05.raw-counts
4 bit I/O FALSE 5A-75B:V8.0.encoder.05.reset
4 float OUT 0 5A-75B:V8.0.encoder.05.velocity
4 float OUT 0 5A-75B:V8.0.encoder.05.velocity-rpm
4 bit IN FALSE 5A-75B:V8.0.gpio.00.out
4 bit IN FALSE 5A-75B:V8.0.gpio.01.out
4 bit IN FALSE 5A-75B:V8.0.gpio.02.out
4 bit IN FALSE 5A-75B:V8.0.gpio.03.out
4 bit IN FALSE 5A-75B:V8.0.gpio.04.out
4 bit IN FALSE 5A-75B:V8.0.gpio.05.out
4 bit OUT FALSE 5A-75B:V8.0.gpio.06.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.06.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.07.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.07.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.08.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.08.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.09.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.09.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.10.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.10.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.11.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.11.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.12.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.12.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.13.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.13.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.14.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.14.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.15.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.15.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.16.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.16.in-not
4 bit OUT FALSE 5A-75B:V8.0.gpio.17.in
4 bit OUT FALSE 5A-75B:V8.0.gpio.17.in-not
4 bit IN FALSE 5A-75B:V8.0.gpio.18.out
4 bit IN FALSE 5A-75B:V8.0.gpio.19.out
4 bit IN FALSE 5A-75B:V8.0.gpio.20.out
4 bit IN FALSE 5A-75B:V8.0.gpio.21.out
4 bit IN FALSE 5A-75B:V8.0.gpio.22.out
4 bit IN FALSE 5A-75B:V8.0.gpio.23.out
4 float OUT 0 5A-75B:V8.0.pwm.00.curr_dc
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.00.curr_period
4 float OUT 0 5A-75B:V8.0.pwm.00.curr_pwm_freq
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.00.curr_width
4 bit IN FALSE 5A-75B:V8.0.pwm.00.dither_pwm
4 bit IN FALSE 5A-75B:V8.0.pwm.00.enable
4 float IN 1 5A-75B:V8.0.pwm.00.max_dc
4 float IN 0 5A-75B:V8.0.pwm.00.min_dc
4 float IN 0 5A-75B:V8.0.pwm.00.offset
4 float IN 100000 5A-75B:V8.0.pwm.00.pwm_freq
4 float IN 1 5A-75B:V8.0.pwm.00.scale
4 float IN 0 5A-75B:V8.0.pwm.00.value
4 float OUT 0 5A-75B:V8.0.pwm.01.curr_dc
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.01.curr_period
4 float OUT 0 5A-75B:V8.0.pwm.01.curr_pwm_freq
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.01.curr_width
4 bit IN FALSE 5A-75B:V8.0.pwm.01.dither_pwm
4 bit IN FALSE 5A-75B:V8.0.pwm.01.enable
4 float IN 1 5A-75B:V8.0.pwm.01.max_dc
4 float IN 0 5A-75B:V8.0.pwm.01.min_dc
4 float IN 0 5A-75B:V8.0.pwm.01.offset
4 float IN 100000 5A-75B:V8.0.pwm.01.pwm_freq
4 float IN 1 5A-75B:V8.0.pwm.01.scale
4 float IN 0 5A-75B:V8.0.pwm.01.value
4 float OUT 0 5A-75B:V8.0.pwm.02.curr_dc
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.02.curr_period
4 float OUT 0 5A-75B:V8.0.pwm.02.curr_pwm_freq
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.02.curr_width
4 bit IN FALSE 5A-75B:V8.0.pwm.02.dither_pwm
4 bit IN FALSE 5A-75B:V8.0.pwm.02.enable
4 float IN 1 5A-75B:V8.0.pwm.02.max_dc
4 float IN 0 5A-75B:V8.0.pwm.02.min_dc
4 float IN 0 5A-75B:V8.0.pwm.02.offset
4 float IN 100000 5A-75B:V8.0.pwm.02.pwm_freq
4 float IN 1 5A-75B:V8.0.pwm.02.scale
4 float IN 0 5A-75B:V8.0.pwm.02.value
4 float OUT 0 5A-75B:V8.0.pwm.03.curr_dc
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.03.curr_period
4 float OUT 0 5A-75B:V8.0.pwm.03.curr_pwm_freq
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.03.curr_width
4 bit IN FALSE 5A-75B:V8.0.pwm.03.dither_pwm
4 bit IN FALSE 5A-75B:V8.0.pwm.03.enable
4 float IN 1 5A-75B:V8.0.pwm.03.max_dc
4 float IN 0 5A-75B:V8.0.pwm.03.min_dc
4 float IN 0 5A-75B:V8.0.pwm.03.offset
4 float IN 100000 5A-75B:V8.0.pwm.03.pwm_freq
4 float IN 1 5A-75B:V8.0.pwm.03.scale
4 float IN 0 5A-75B:V8.0.pwm.03.value
4 float OUT 0 5A-75B:V8.0.pwm.04.curr_dc
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.04.curr_period
4 float OUT 0 5A-75B:V8.0.pwm.04.curr_pwm_freq
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.04.curr_width
4 bit IN FALSE 5A-75B:V8.0.pwm.04.dither_pwm
4 bit IN FALSE 5A-75B:V8.0.pwm.04.enable
4 float IN 1 5A-75B:V8.0.pwm.04.max_dc
4 float IN 0 5A-75B:V8.0.pwm.04.min_dc
4 float IN 0 5A-75B:V8.0.pwm.04.offset
4 float IN 100000 5A-75B:V8.0.pwm.04.pwm_freq
4 float IN 1 5A-75B:V8.0.pwm.04.scale
4 float IN 0 5A-75B:V8.0.pwm.04.value
4 float OUT 0 5A-75B:V8.0.pwm.05.curr_dc
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.05.curr_period
4 float OUT 0 5A-75B:V8.0.pwm.05.curr_pwm_freq
4 u32 OUT 0x00000000 5A-75B:V8.0.pwm.05.curr_width
4 bit IN FALSE 5A-75B:V8.0.pwm.05.dither_pwm
4 bit IN FALSE 5A-75B:V8.0.pwm.05.enable
4 float IN 1 5A-75B:V8.0.pwm.05.max_dc
4 float IN 0 5A-75B:V8.0.pwm.05.min_dc
4 float IN 0 5A-75B:V8.0.pwm.05.offset
4 float IN 100000 5A-75B:V8.0.pwm.05.pwm_freq
4 float IN 1 5A-75B:V8.0.pwm.05.scale
4 float IN 0 5A-75B:V8.0.pwm.05.value
4 s32 OUT 0 5A-75B:V8.0.read.time
4 float IN 0 5A-75B:V8.0.stepgen.00.acceleration-cmd
4 u32 OUT 0x00000000 5A-75B:V8.0.stepgen.00.counts
4 bit IN FALSE 5A-75B:V8.0.stepgen.00.debug
4 bit IN FALSE 5A-75B:V8.0.stepgen.00.enable
4 float IN 0 5A-75B:V8.0.stepgen.00.position-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.00.position-feedback
4 float OUT 0 5A-75B:V8.0.stepgen.00.position-prediction
4 float IN 0 5A-75B:V8.0.stepgen.00.velocity-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.00.velocity-feedback
4 bit IN FALSE 5A-75B:V8.0.stepgen.00.velocity-mode
4 float OUT 0 5A-75B:V8.0.stepgen.00.velocity-prediction
4 float IN 0 5A-75B:V8.0.stepgen.01.acceleration-cmd
4 u32 OUT 0x00000000 5A-75B:V8.0.stepgen.01.counts
4 bit IN FALSE 5A-75B:V8.0.stepgen.01.debug
4 bit IN FALSE 5A-75B:V8.0.stepgen.01.enable
4 float IN 0 5A-75B:V8.0.stepgen.01.position-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.01.position-feedback
4 float OUT 0 5A-75B:V8.0.stepgen.01.position-prediction
4 float IN 0 5A-75B:V8.0.stepgen.01.velocity-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.01.velocity-feedback
4 bit IN FALSE 5A-75B:V8.0.stepgen.01.velocity-mode
4 float OUT 0 5A-75B:V8.0.stepgen.01.velocity-prediction
4 float IN 0 5A-75B:V8.0.stepgen.02.acceleration-cmd
4 u32 OUT 0x00000000 5A-75B:V8.0.stepgen.02.counts
4 bit IN FALSE 5A-75B:V8.0.stepgen.02.debug
4 bit IN FALSE 5A-75B:V8.0.stepgen.02.enable
4 float IN 0 5A-75B:V8.0.stepgen.02.position-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.02.position-feedback
4 float OUT 0 5A-75B:V8.0.stepgen.02.position-prediction
4 float IN 0 5A-75B:V8.0.stepgen.02.velocity-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.02.velocity-feedback
4 bit IN FALSE 5A-75B:V8.0.stepgen.02.velocity-mode
4 float OUT 0 5A-75B:V8.0.stepgen.02.velocity-prediction
4 float IN 0 5A-75B:V8.0.stepgen.03.acceleration-cmd
4 u32 OUT 0x00000000 5A-75B:V8.0.stepgen.03.counts
4 bit IN FALSE 5A-75B:V8.0.stepgen.03.debug
4 bit IN FALSE 5A-75B:V8.0.stepgen.03.enable
4 float IN 0 5A-75B:V8.0.stepgen.03.position-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.03.position-feedback
4 float OUT 0 5A-75B:V8.0.stepgen.03.position-prediction
4 float IN 0 5A-75B:V8.0.stepgen.03.velocity-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.03.velocity-feedback
4 bit IN FALSE 5A-75B:V8.0.stepgen.03.velocity-mode
4 float OUT 0 5A-75B:V8.0.stepgen.03.velocity-prediction
4 float IN 0 5A-75B:V8.0.stepgen.04.acceleration-cmd
4 u32 OUT 0x00000000 5A-75B:V8.0.stepgen.04.counts
4 bit IN FALSE 5A-75B:V8.0.stepgen.04.debug
4 bit IN FALSE 5A-75B:V8.0.stepgen.04.enable
4 float IN 0 5A-75B:V8.0.stepgen.04.position-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.04.position-feedback
4 float OUT 0 5A-75B:V8.0.stepgen.04.position-prediction
4 float IN 0 5A-75B:V8.0.stepgen.04.velocity-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.04.velocity-feedback
4 bit IN FALSE 5A-75B:V8.0.stepgen.04.velocity-mode
4 float OUT 0 5A-75B:V8.0.stepgen.04.velocity-prediction
4 float IN 0 5A-75B:V8.0.stepgen.05.acceleration-cmd
4 u32 OUT 0x00000000 5A-75B:V8.0.stepgen.05.counts
4 bit IN FALSE 5A-75B:V8.0.stepgen.05.debug
4 bit IN FALSE 5A-75B:V8.0.stepgen.05.enable
4 float IN 0 5A-75B:V8.0.stepgen.05.position-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.05.position-feedback
4 float OUT 0 5A-75B:V8.0.stepgen.05.position-prediction
4 float IN 0 5A-75B:V8.0.stepgen.05.velocity-cmd
4 float OUT 0 5A-75B:V8.0.stepgen.05.velocity-feedback
4 bit IN FALSE 5A-75B:V8.0.stepgen.05.velocity-mode
4 float OUT 0 5A-75B:V8.0.stepgen.05.velocity-prediction
4 u32 I/O 0x00000000 5A-75B:V8.0.wallclock.ticks_lsb
4 u32 OUT 0x00000000 5A-75B:V8.0.wallclock.ticks_msb
4 bit I/O FALSE 5A-75B:V8.0.watchdog.has_bitten
4 s32 OUT 0 5A-75B:V8.0.write.time
and also Show Param:
halcmd: show param
Parameters:
Owner Type Dir Value Name
4 bit RW FALSE 5A-75B:V8.0.debug
4 float RW 0 5A-75B:V8.0.encoder.00.position-scale
4 bit RW FALSE 5A-75B:V8.0.encoder.00.x4-mode
4 float RW 0 5A-75B:V8.0.encoder.01.position-scale
4 bit RW FALSE 5A-75B:V8.0.encoder.01.x4-mode
4 float RW 0 5A-75B:V8.0.encoder.02.position-scale
4 bit RW FALSE 5A-75B:V8.0.encoder.02.x4-mode
4 float RW 0 5A-75B:V8.0.encoder.03.position-scale
4 bit RW FALSE 5A-75B:V8.0.encoder.03.x4-mode
4 float RW 0 5A-75B:V8.0.encoder.04.position-scale
4 bit RW FALSE 5A-75B:V8.0.encoder.04.x4-mode
4 float RW 0 5A-75B:V8.0.encoder.05.position-scale
4 bit RW FALSE 5A-75B:V8.0.encoder.05.x4-mode
4 bit RW FALSE 5A-75B:V8.0.gpio.00.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.01.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.02.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.03.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.04.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.05.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.18.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.19.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.20.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.21.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.22.invert_output
4 bit RW FALSE 5A-75B:V8.0.gpio.23.invert_output
4 s32 RW 0 5A-75B:V8.0.read.tmax
4 bit RO FALSE 5A-75B:V8.0.read.tmax-increased
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.00.dir-hold-time
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.00.dir-setup-time
4 float RO 0 5A-75B:V8.0.stepgen.00.frequency
4 float RW 0 5A-75B:V8.0.stepgen.00.max-acceleration
4 float RW 0 5A-75B:V8.0.stepgen.00.max-velocity
4 float RW 0 5A-75B:V8.0.stepgen.00.position-scale
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.00.steplen
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.00.stepspace
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.01.dir-hold-time
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.01.dir-setup-time
4 float RO 0 5A-75B:V8.0.stepgen.01.frequency
4 float RW 0 5A-75B:V8.0.stepgen.01.max-acceleration
4 float RW 0 5A-75B:V8.0.stepgen.01.max-velocity
4 float RW 0 5A-75B:V8.0.stepgen.01.position-scale
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.01.steplen
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.01.stepspace
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.02.dir-hold-time
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.02.dir-setup-time
4 float RO 0 5A-75B:V8.0.stepgen.02.frequency
4 float RW 0 5A-75B:V8.0.stepgen.02.max-acceleration
4 float RW 0 5A-75B:V8.0.stepgen.02.max-velocity
4 float RW 0 5A-75B:V8.0.stepgen.02.position-scale
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.02.steplen
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.02.stepspace
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.03.dir-hold-time
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.03.dir-setup-time
4 float RO 0 5A-75B:V8.0.stepgen.03.frequency
4 float RW 0 5A-75B:V8.0.stepgen.03.max-acceleration
4 float RW 0 5A-75B:V8.0.stepgen.03.max-velocity
4 float RW 0 5A-75B:V8.0.stepgen.03.position-scale
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.03.steplen
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.03.stepspace
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.04.dir-hold-time
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.04.dir-setup-time
4 float RO 0 5A-75B:V8.0.stepgen.04.frequency
4 float RW 0 5A-75B:V8.0.stepgen.04.max-acceleration
4 float RW 0 5A-75B:V8.0.stepgen.04.max-velocity
4 float RW 0 5A-75B:V8.0.stepgen.04.position-scale
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.04.steplen
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.04.stepspace
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.05.dir-hold-time
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.05.dir-setup-time
4 float RO 0 5A-75B:V8.0.stepgen.05.frequency
4 float RW 0 5A-75B:V8.0.stepgen.05.max-acceleration
4 float RW 0 5A-75B:V8.0.stepgen.05.max-velocity
4 float RW 0 5A-75B:V8.0.stepgen.05.position-scale
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.05.steplen
4 u32 RW 0x00000000 5A-75B:V8.0.stepgen.05.stepspace
4 u32 RO 0x00000000 5A-75B:V8.0.watchdog.timeout_cycles
4 u32 RW 0x00000000 5A-75B:V8.0.watchdog.timeout_ns
4 s32 RW 0 5A-75B:V8.0.write.tmax
4 bit RO FALSE 5A-75B:V8.0.write.tmax-increased
But no matter which out pin I set to enable with setp command,, there are no changes measured on the board, and I measured ALL pins.
The 5A-75B:V8.0.watchdog.has_bitten is FALSE.
halcmd: setp 5A-75B:V8.0.gpio.00.out 1
halcmd: getp 5A-75B:V8.0.gpio.00.out
TRUE
Thanks again for your help.
- C0bra
- C0bra
Retrofiting Scm record 220
Category: CNC Machines
Machine still have much more but its certanly enough if make connections more simply.
Thing is am not sure should I mess up factory instalations or maybe its better to get controller fixed and just threw it in and go, would benefit from 4.axis which motor is driven analog (tool turret maybe too) and I guess its professional nc. and is probably better quality and reliability that of diy approach.
On the other hand with new bob would have more possibility, like 4.axis on table rotation and add diode laser or plasma torch.
Have already tried those Yaskawa servos and are working with step/dir signal, just had some problem with endless motor vibration on X axis with smallest move of shaft.
Have swap it with Y drive and they work fine, its only happening with X drive on X servo.
Am not worried about tools turret since if cant work with step/dir its a small motor and probably have some stepper laying around that can replace it.
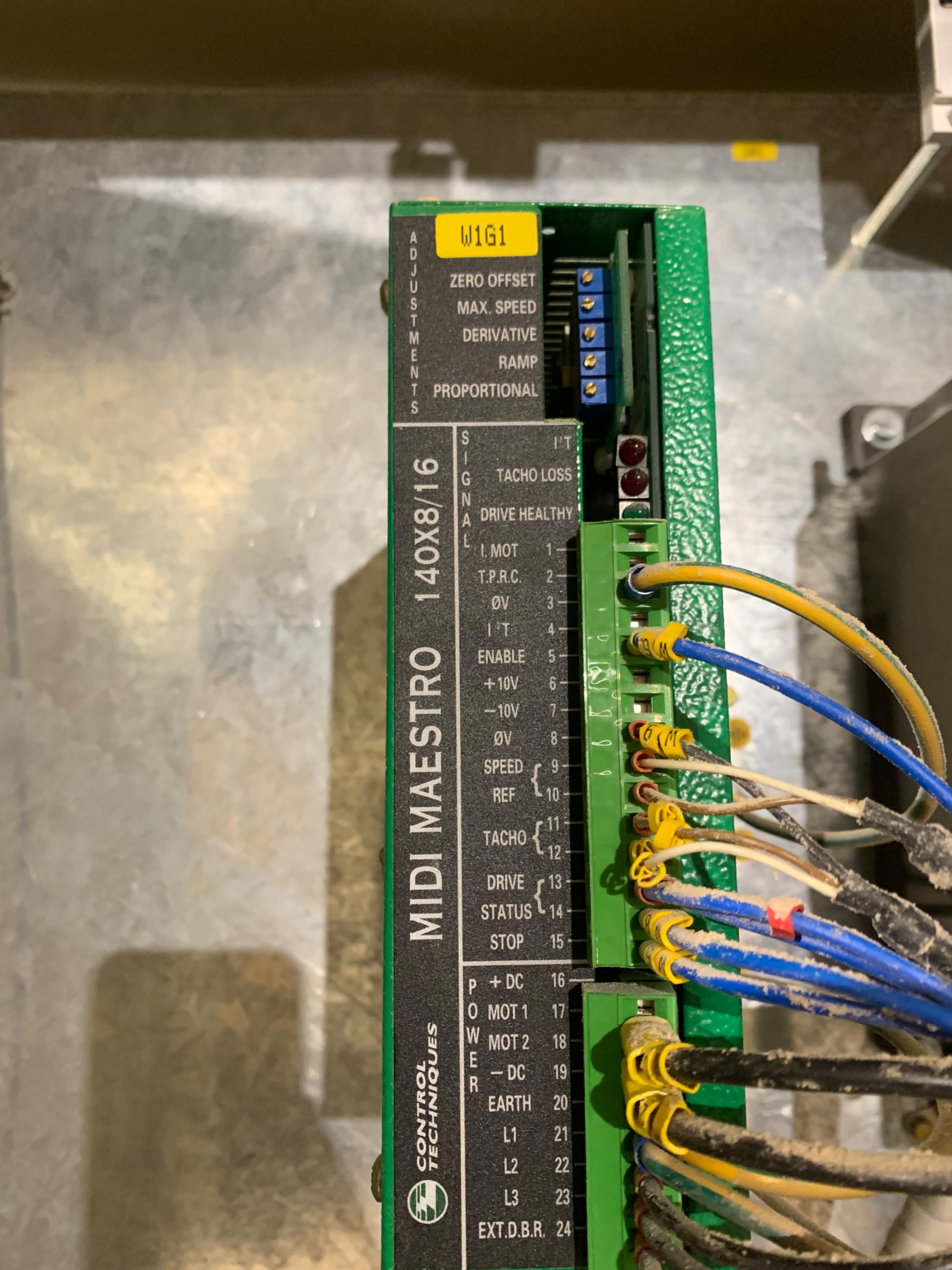
Here is pic of the drive for the 4.axis (tilting spindle head on sides).
Midi Maestro 140x8/16
- Aciera

Machine On button.
Category: Gmoccapy
'halui.machine.on' is an input that is used to put the machine in the 'on' state. I suggested using this because I falsely thought you wanted to use an external switch to do that.I think I can now see that the first response, 'machine.on', appears to be correct.
Since we are not using any gmoccapy related pins there is no need to put this in the postgui_halfile. 'halui' pins exist already before the gui has loaded. The button state in the gui reflects the state of 'machine.is-on'.It now appears to me that, since the action I wanted occurs after the gui is open, the code should have appeared in a postgui hal file.
It would also be interesting to understand why 'machine.is-on' works to toggle the button on/off when it is described as an input, presumably to display the current state of the machine.
'halui.machine.is-on' is an _output_ that reflects the current state of the machine.
linuxcnc.org/docs/html/gui/halui.html#_machine