Search Results (Searched for: )
- 86turbodsl
- 86turbodsl
12 Sep 2024 10:15
Replied by 86turbodsl on topic Spindle speed via VFD *AND* reeves drive
Spindle speed via VFD *AND* reeves drive
Category: Basic Configuration
- Mattmk
- Mattmk
12 Sep 2024 10:04
- the_erk
- the_erk
12 Sep 2024 09:48 - 12 Sep 2024 10:09
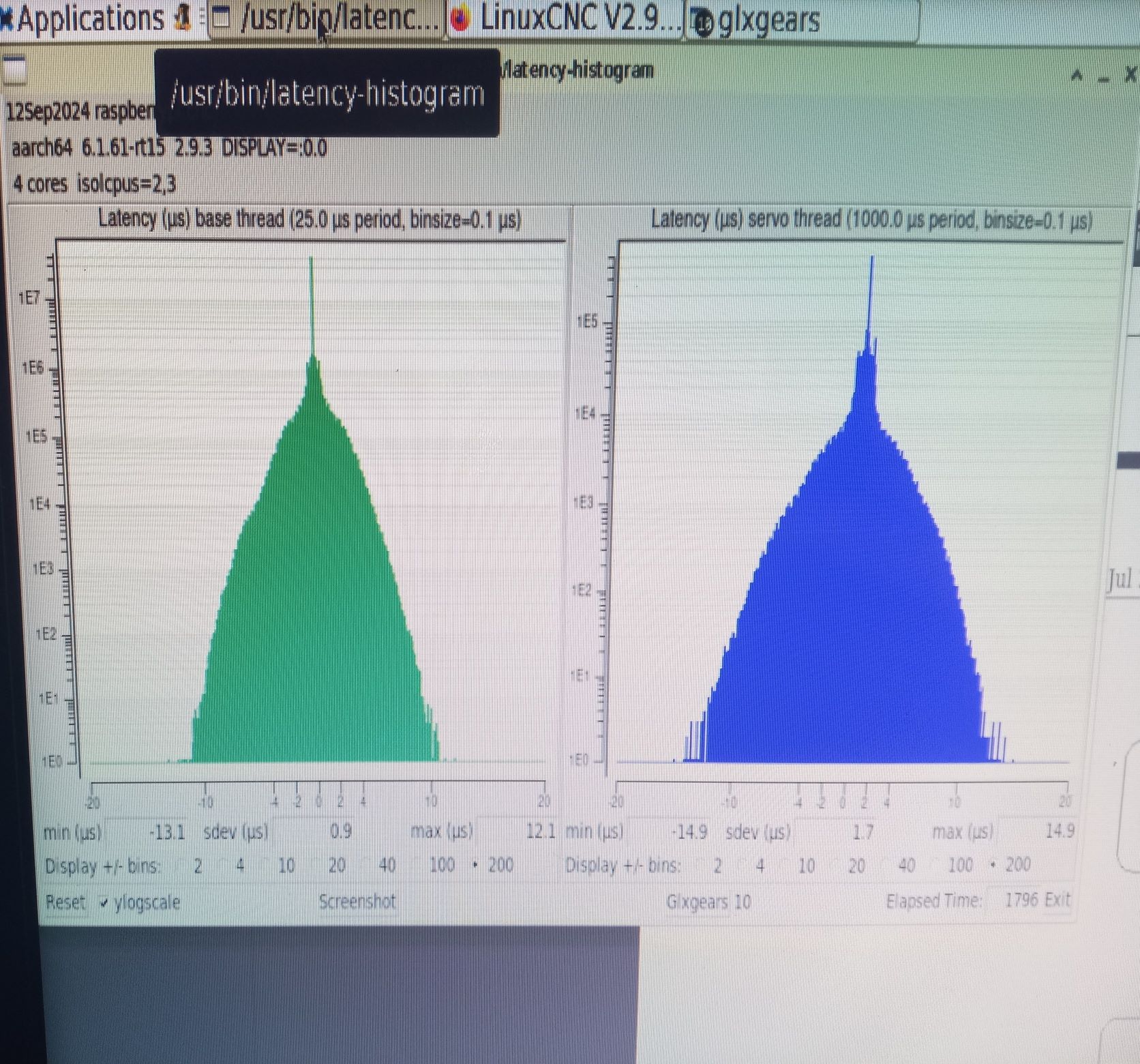
Replied by the_erk on topic Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Category: Basic Configuration
- Abdulkareem
- Abdulkareem
12 Sep 2024 09:05
- Plasmanfm
- Plasmanfm
12 Sep 2024 08:57 - 12 Sep 2024 10:22
- rodw

12 Sep 2024 08:22
- rodw
12 Sep 2024 08:10
Replied by rodw on topic Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Category: Basic Configuration
- rodw
12 Sep 2024 08:05
Replied by rodw on topic Odroid H2+ - what distro/config works?
Odroid H2+ - what distro/config works?
Category: Computers and Hardware
- the_erk
- the_erk
12 Sep 2024 07:43 - 12 Sep 2024 13:57
Replied by the_erk on topic Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Category: Basic Configuration
- Darium
- Darium
12 Sep 2024 06:46
Replied by Darium on topic Following Error keeps creeping up
Following Error keeps creeping up
Category: General LinuxCNC Questions
- bentiggin
- bentiggin
12 Sep 2024 06:44
Replied by bentiggin on topic Setting up 7i97t w idc26 bob
Setting up 7i97t w idc26 bob
Category: Driver Boards
- itsemast
- itsemast
12 Sep 2024 06:05
Replied by itsemast on topic PREEMPT-RT is close to getting merged with the mainline Linux kernel
PREEMPT-RT is close to getting merged with the mainline Linux kernel
Category: General LinuxCNC Questions
- itsemast
- itsemast
12 Sep 2024 05:57
Getting LinuxCNC as an option to RPi Imager was created by itsemast
Getting LinuxCNC as an option to RPi Imager
Category: Installing LinuxCNC
- the_erk
- the_erk
12 Sep 2024 05:55
Replied by the_erk on topic Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Linux beginner RPI 5, GPIO + ethercat 4 axis adventure
Category: Basic Configuration
- stenly
- stenly
12 Sep 2024 05:49
Time to create page: 0.874 seconds