Search Results (Searched for: )
- unknown
- unknown
29 Aug 2025 09:24
- Aciera

29 Aug 2025 09:18
Replied by Aciera on topic How to modify 5axiskins from BC head to AC head
How to modify 5axiskins from BC head to AC head
Category: General LinuxCNC Questions
- Rookie0
- Rookie0
29 Aug 2025 08:48
Replied by Rookie0 on topic orient spindle with ethercat EL5101
orient spindle with ethercat EL5101
Category: EtherCAT
- Hakan
- Hakan
29 Aug 2025 08:48
Replied by Hakan on topic orient spindle with ethercat EL5101
orient spindle with ethercat EL5101
Category: EtherCAT
- STyrer
- STyrer
29 Aug 2025 08:01
- laurentl38
- laurentl38
29 Aug 2025 07:58
orient spindle with ethercat EL5101 was created by laurentl38
orient spindle with ethercat EL5101
Category: EtherCAT
- HMJ-Baltic
- HMJ-Baltic
29 Aug 2025 07:53 - 29 Aug 2025 13:53
Replied by HMJ-Baltic on topic REMORA EC500 - NVMPG - version2 NVUM/NVEM
REMORA EC500 - NVMPG - version2 NVUM/NVEM
Category: Computers and Hardware
- xenon-alien

29 Aug 2025 07:36 - 29 Aug 2025 08:42
Replied by xenon-alien on topic Round system parameter to tenths?
Round system parameter to tenths?
Category: G&M Codes
- Aciera
29 Aug 2025 05:48 - 29 Aug 2025 09:16
Replied by Aciera on topic How to modify 5axiskins from BC head to AC head
How to modify 5axiskins from BC head to AC head
Category: General LinuxCNC Questions
- Artur_1617
29 Aug 2025 04:33 - 29 Aug 2025 16:11
Replied by Artur_1617 on topic Stop feed when spindle rpm lower
Stop feed when spindle rpm lower
Category: AXIS
- PCW

29 Aug 2025 04:00
Replied by PCW on topic 5i25T + 7i85S Firmware Request (4 PWM Gens, 4 Encoders) Please !!
5i25T + 7i85S Firmware Request (4 PWM Gens, 4 Encoders) Please !!
Category: Driver Boards
- Gautham
- Gautham
29 Aug 2025 02:45
Replied by Gautham on topic 5 axis milling machine with 7i96s
5 axis milling machine with 7i96s
Category: Driver Boards
- Gautham
- Gautham
29 Aug 2025 02:43
Replied by Gautham on topic Connecting my 7i96s to the VFD
Connecting my 7i96s to the VFD
Category: Driver Boards
- speck
- speck
29 Aug 2025 01:34
- Trav328

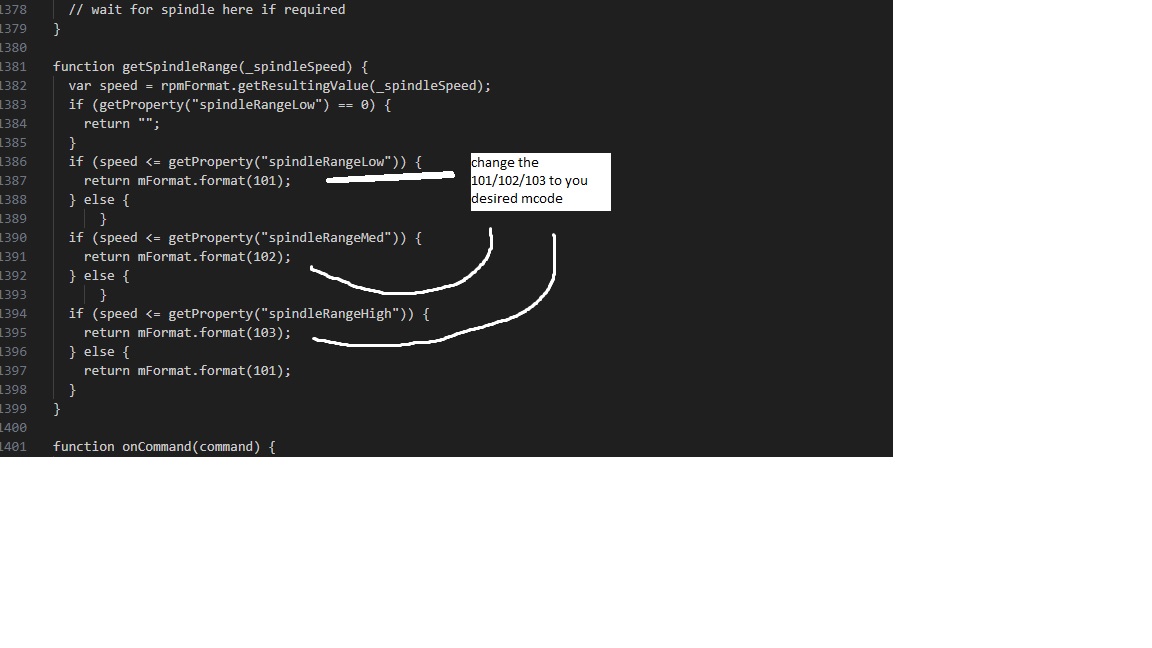
29 Aug 2025 00:45 - 04 Sep 2025 15:58
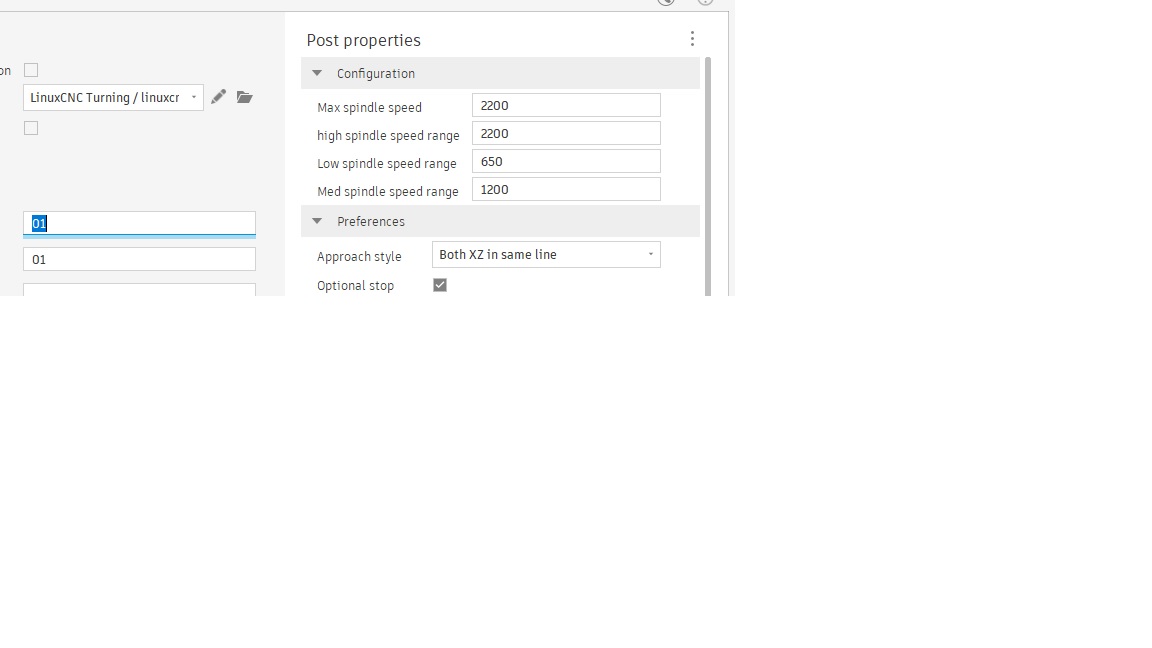
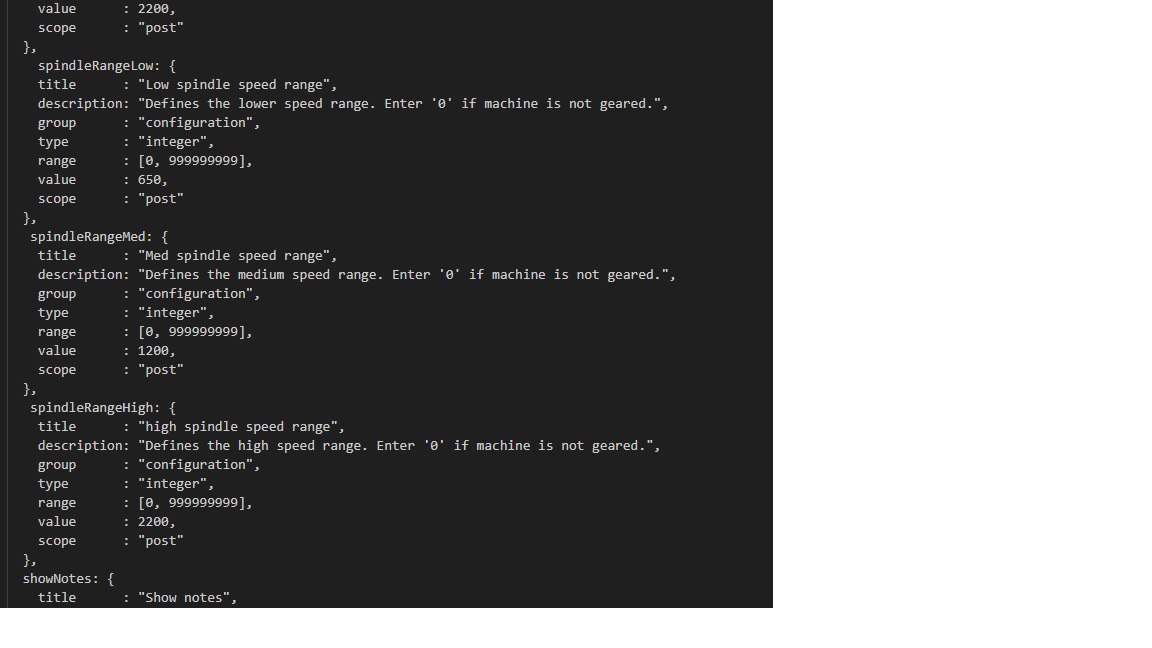
Replied by Trav328 on topic Add gear/range change to linuxcnc turn post
Add gear/range change to linuxcnc turn post
Category: Fusion 360
Time to create page: 0.483 seconds