Search Results (Searched for: )
- summat
- summat
02 May 2026 09:05 - 02 May 2026 09:07
Replied by summat on topic 7i76e - Input pin erratic behaviour
7i76e - Input pin erratic behaviour
Category: Driver Boards
- tommylight

02 May 2026 01:46
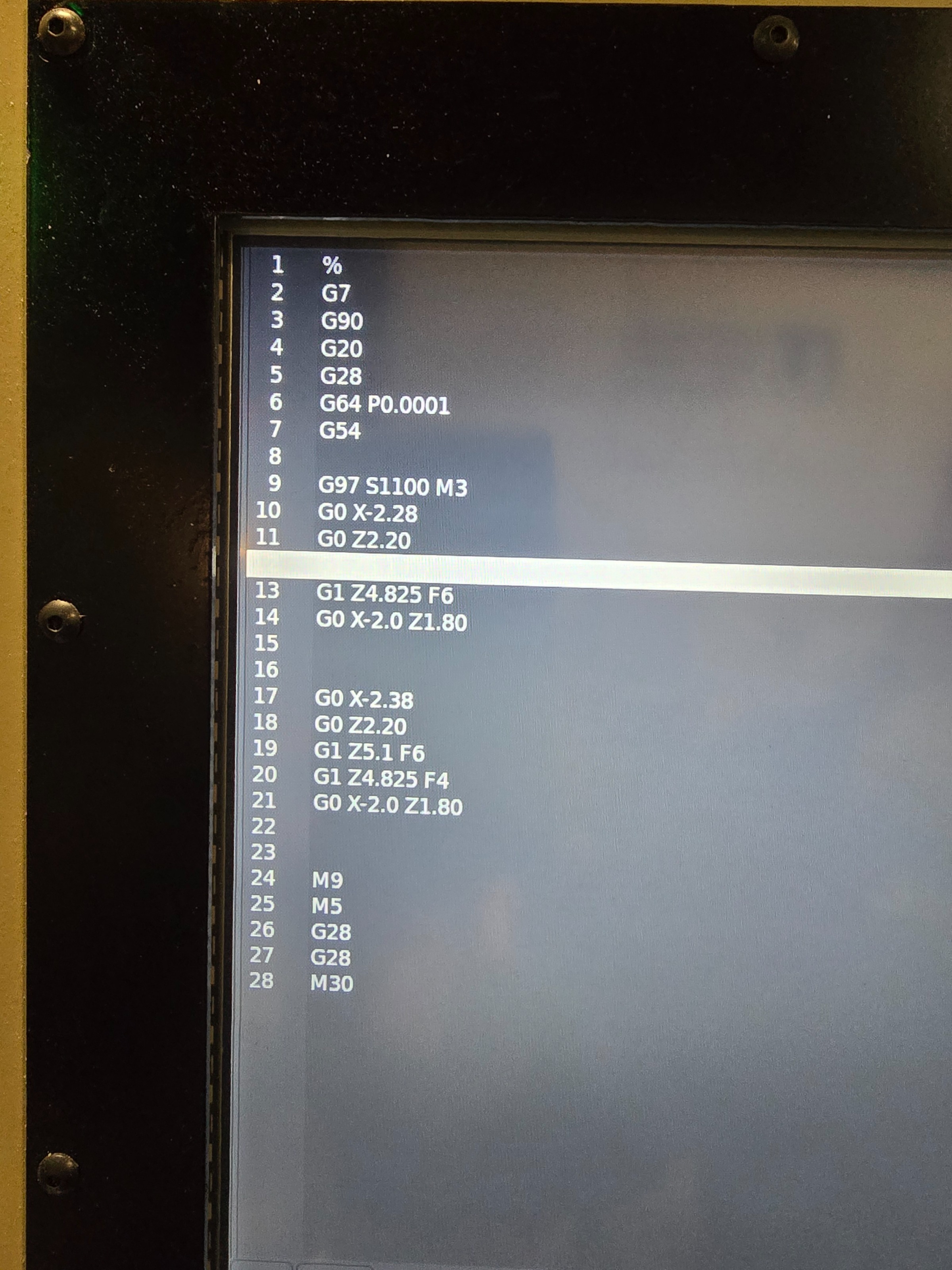
Replied by tommylight on topic Can't read gcode text in dark mode when editing.
Can't read gcode text in dark mode when editing.
Category: Gmoccapy
- COFHAL
- COFHAL
02 May 2026 01:37
Replied by COFHAL on topic QTDragon_hd with mechanical dial tool setter
QTDragon_hd with mechanical dial tool setter
Category: Qtvcp
- TheTinkeringMechanic1
- TheTinkeringMechanic1
02 May 2026 01:29
Replied by TheTinkeringMechanic1 on topic Can't read gcode text in dark mode when editing.
Can't read gcode text in dark mode when editing.
Category: Gmoccapy
- tommylight
02 May 2026 01:22
Replied by tommylight on topic Can't read gcode text in dark mode when editing.
Can't read gcode text in dark mode when editing.
Category: Gmoccapy
- TheTinkeringMechanic1
- TheTinkeringMechanic1
02 May 2026 01:14
Can't read gcode text in dark mode when editing. was created by TheTinkeringMechanic1
Can't read gcode text in dark mode when editing.
Category: Gmoccapy
- COFHAL
- COFHAL
02 May 2026 01:12
- TheTinkeringMechanic1
- TheTinkeringMechanic1
01 May 2026 22:30
Replied by TheTinkeringMechanic1 on topic (Solved) Races through first cycle upon first start up. Fine afterwards.
(Solved) Races through first cycle upon first start up. Fine afterwards.
Category: Basic Configuration
- Insomniac
- Insomniac
01 May 2026 19:52
- PCW

01 May 2026 18:39
Replied by PCW on topic Firmware request: 7i95T with 4 PWM generators on P1
Firmware request: 7i95T with 4 PWM generators on P1
Category: Driver Boards
- zbeeru
- zbeeru
01 May 2026 16:50
Firmware request: 7i95T with 4 PWM generators on P1 was created by zbeeru
Firmware request: 7i95T with 4 PWM generators on P1
Category: Driver Boards
- Aciera

01 May 2026 16:45
Replied by Aciera on topic New rotary modulo axis feedback and testers wanted
New rotary modulo axis feedback and testers wanted
Category: General LinuxCNC Questions
- grandixximo

01 May 2026 13:13
Replied by grandixximo on topic New rotary modulo axis feedback and testers wanted
New rotary modulo axis feedback and testers wanted
Category: General LinuxCNC Questions
- Todd Zuercher

01 May 2026 13:11
Replied by Todd Zuercher on topic LinuxCNC S-Curve Accelerations
LinuxCNC S-Curve Accelerations
Category: General LinuxCNC Questions
- hmnijp
- hmnijp
01 May 2026 09:43 - 01 May 2026 09:46
Replied by hmnijp on topic New rotary modulo axis feedback and testers wanted
New rotary modulo axis feedback and testers wanted
Category: General LinuxCNC Questions
Time to create page: 0.611 seconds