Another plasma component...
- phillc54
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2019 00:17 #138268
by phillc54
Replied by phillc54 on topic Another plasma component...
It shouldn't matter where Z0 is.
mkardasi has Safe Height 0 because he has a limited Z travel, this is a new feature introduced a couple of days ago.
I just tried both imperial and metric sims and I cannot see that issue, I will investigate further...
mkardasi has Safe Height 0 because he has a limited Z travel, this is a new feature introduced a couple of days ago.
I just tried both imperial and metric sims and I cannot see that issue, I will investigate further...
Please Log in or Create an account to join the conversation.
- mkardasi
- Offline
- Senior Member
-

Less
More
- Posts: 48
- Thank you received: 18
01 Jul 2019 02:17 #138275
by mkardasi
Replied by mkardasi on topic Another plasma component...
Phil, I experimented some more and if I restart Linuxcnc everything is fine. It starts as soon I do a probe. Be it through ngc or hitting the probe test button. Hope this is helpful.
Please Log in or Create an account to join the conversation.
- phillc54
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2019 02:24 #138277
by phillc54
Replied by phillc54 on topic Another plasma component...
If you are running from a terminal you should get a PROBE: ON {time} message when probing starts and when a probe is sensed you should get a PROBE: OFF {time} message and the count should stop.
I still haven't been able to duplicate it.
I still haven't been able to duplicate it.
Please Log in or Create an account to join the conversation.
- mkardasi
- Offline
- Senior Member
-
Less
More
- Posts: 48
- Thank you received: 18
01 Jul 2019 02:43 - 01 Jul 2019 02:44 #138278
by mkardasi
No PROBE: OFF message the counter keeps running until I quit. I've attached my files if that helps you duplicate.
Replied by mkardasi on topic Another plasma component...
If you are running from a terminal you should get a PROBE: ON {time} message when probing starts and when a probe is sensed you should get a PROBE: OFF {time} message and the count should stop.
I still haven't been able to duplicate it.
No PROBE: OFF message the counter keeps running until I quit. I've attached my files if that helps you duplicate.
mkardasi@LinuxCNC:~$ cd linuxcnc-dev/src
mkardasi@LinuxCNC:~/linuxcnc-dev/src$ source ../scripts/rip-environment
mkardasi@LinuxCNC:~/linuxcnc-dev/src$ linuxcnc
LINUXCNC - 2.9.0~pre0
Machine configuration directory is '/home/mkardasi/linuxcnc/configs/esab-plasmac'
Machine configuration file is 'esab-plasmac.ini'
Starting LinuxCNC...
twopass:invoked with <> options
twopass:found ./esab-plasmac.hal
twopass:found ./plasmac.hal
twopass:found ./esab-plasmac_connections.hal
Note: Using POSIX realtime
hm2: loading Mesa HostMot2 driver version 0.15
hm2_eth: loading Mesa AnyIO HostMot2 ethernet driver version 0.2
hm2_eth: 10.10.10.10: Hardware address: 00:60:1b:16:00:c4
hm2_eth: discovered 7I96
hm2/hm2_7i96.0: Smart Serial Firmware Version 43
hm2/hm2_7i96.0: 51 I/O Pins used:
hm2/hm2_7i96.0: IO Pin 000 (TB3-01): IOPort
hm2/hm2_7i96.0: IO Pin 001 (TB3-02): IOPort
hm2/hm2_7i96.0: IO Pin 002 (TB3-03): IOPort
hm2/hm2_7i96.0: IO Pin 003 (TB3-04): IOPort
hm2/hm2_7i96.0: IO Pin 004 (TB3-05): IOPort
hm2/hm2_7i96.0: IO Pin 005 (TB3-06): IOPort
hm2/hm2_7i96.0: IO Pin 006 (TB3-07): IOPort
hm2/hm2_7i96.0: IO Pin 007 (TB3-08): IOPort
hm2/hm2_7i96.0: IO Pin 008 (TB3-09): IOPort
hm2/hm2_7i96.0: IO Pin 009 (TB3-10): IOPort
hm2/hm2_7i96.0: IO Pin 010 (TB3-11): IOPort
hm2/hm2_7i96.0: IO Pin 011 (TB3-13/TB3-14): SSR #0, pin Out-00 (Output)
hm2/hm2_7i96.0: IO Pin 012 (TB3-15/TB3-16): SSR #0, pin Out-01 (Output)
hm2/hm2_7i96.0: IO Pin 013 (TB3-17/TB3-18): SSR #0, pin Out-02 (Output)
hm2/hm2_7i96.0: IO Pin 014 (TB3-19/TB3-20): SSR #0, pin Out-03 (Output)
hm2/hm2_7i96.0: IO Pin 015 (TB3-21/TB3-22): SSR #0, pin Out-04 (Output)
hm2/hm2_7i96.0: IO Pin 016 (TB3-23/TB3-24): SSR #0, pin Out-05 (Output)
hm2/hm2_7i96.0: IO Pin 017 (TB1-02/TB1-03): StepGen #0, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 018 (TB1-04/TB1-05): StepGen #0, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 019 (TB1-08/TB1-09): StepGen #1, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 020 (TB1-10/TB1-11): StepGen #1, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 021 (TB1-14/TB1-15): StepGen #2, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 022 (TB1-16/TB1-17): StepGen #2, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 023 (TB1-20/TB1-21): StepGen #3, pin Step (Output)
hm2/hm2_7i96.0: IO Pin 024 (TB1-22-TB1-23): StepGen #3, pin Direction (Output)
hm2/hm2_7i96.0: IO Pin 025 (TB2-01/TB2-03): IOPort
hm2/hm2_7i96.0: IO Pin 026 (TB2-04/TB2-05): IOPort
hm2/hm2_7i96.0: IO Pin 027 (TB2-07/TB2-08): Encoder #0, pin A (Input)
hm2/hm2_7i96.0: IO Pin 028 (TB2-10/TB2-11): Encoder #0, pin B (Input)
hm2/hm2_7i96.0: IO Pin 029 (TB2-13/TB2-14): Encoder #0, pin Index (Input)
hm2/hm2_7i96.0: IO Pin 030 (TB2-16/TB2-17): IOPort
hm2/hm2_7i96.0: IO Pin 031 (TB2-18/TB2-19): IOPort
hm2/hm2_7i96.0: IO Pin 032 (internal): IOPort
hm2/hm2_7i96.0: IO Pin 033 (internal): SSR #0, pin AC Ref (internal) (Output)
hm2/hm2_7i96.0: IO Pin 034 (P1-01): IOPort
hm2/hm2_7i96.0: IO Pin 035 (P1-02): IOPort
hm2/hm2_7i96.0: IO Pin 036 (P1-03): IOPort
hm2/hm2_7i96.0: IO Pin 037 (P1-04): IOPort
hm2/hm2_7i96.0: IO Pin 038 (P1-05): IOPort
hm2/hm2_7i96.0: IO Pin 039 (P1-06): IOPort
hm2/hm2_7i96.0: IO Pin 040 (P1-07): IOPort
hm2/hm2_7i96.0: IO Pin 041 (P1-08): IOPort
hm2/hm2_7i96.0: IO Pin 042 (P1-09): IOPort
hm2/hm2_7i96.0: IO Pin 043 (P1-11): IOPort
hm2/hm2_7i96.0: IO Pin 044 (P1-13): IOPort
hm2/hm2_7i96.0: IO Pin 045 (P1-15): IOPort
hm2/hm2_7i96.0: IO Pin 046 (P1-17): IOPort
hm2/hm2_7i96.0: IO Pin 047 (P1-19): IOPort
hm2/hm2_7i96.0: IO Pin 048 (P1-21): IOPort
hm2/hm2_7i96.0: IO Pin 049 (P1-23): IOPort
hm2/hm2_7i96.0: IO Pin 050 (P1-25): IOPort
hm2/hm2_7i96.0: registered
note: MAXV max: 10.000 units/sec 600.000 units/min
note: LJOG max: 10.000 units/sec 600.000 units/min
note: LJOG default: 2.500 units/sec 150.000 units/min
waiting for s.joints<0>, s.kinematics_type<0>
waiting for s.joints<0>, s.kinematics_type<0>
waiting for s.joints<0>, s.kinematics_type<0>
waiting for s.joints<0>, s.kinematics_type<0>
Warning: Forward kinematics must handle duplicate coordinate letters:yy
Note:
Individual axis homing is not currently supported for
KINEMATICS_IDENTITY with duplicate axis letter <Y>
note: jog_order='XYZ'
note: jog_invert=set([])
task: main loop took 0.153903 seconds
PROBE: ON 0.0
task: main loop took 0.148993 seconds
task: main loop took 0.141449 seconds
Shutting down and cleaning up LinuxCNC...
task: 9536 cycles, min=0.000007, max=0.153903, avg=0.010069, 3 latency excursions (> 10x expected cycle time of 0.010000s)
hm2_eth: HostMot2 ethernet driver unloaded
hm2: unloading
Note: Using POSIX realtime
mkardasi@LinuxCNC:~/linuxcnc-dev/src$
Last edit: 01 Jul 2019 02:44 by mkardasi.
Please Log in or Create an account to join the conversation.
- phillc54
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2019 03:02 #138279
by phillc54
Replied by phillc54 on topic Another plasma component...
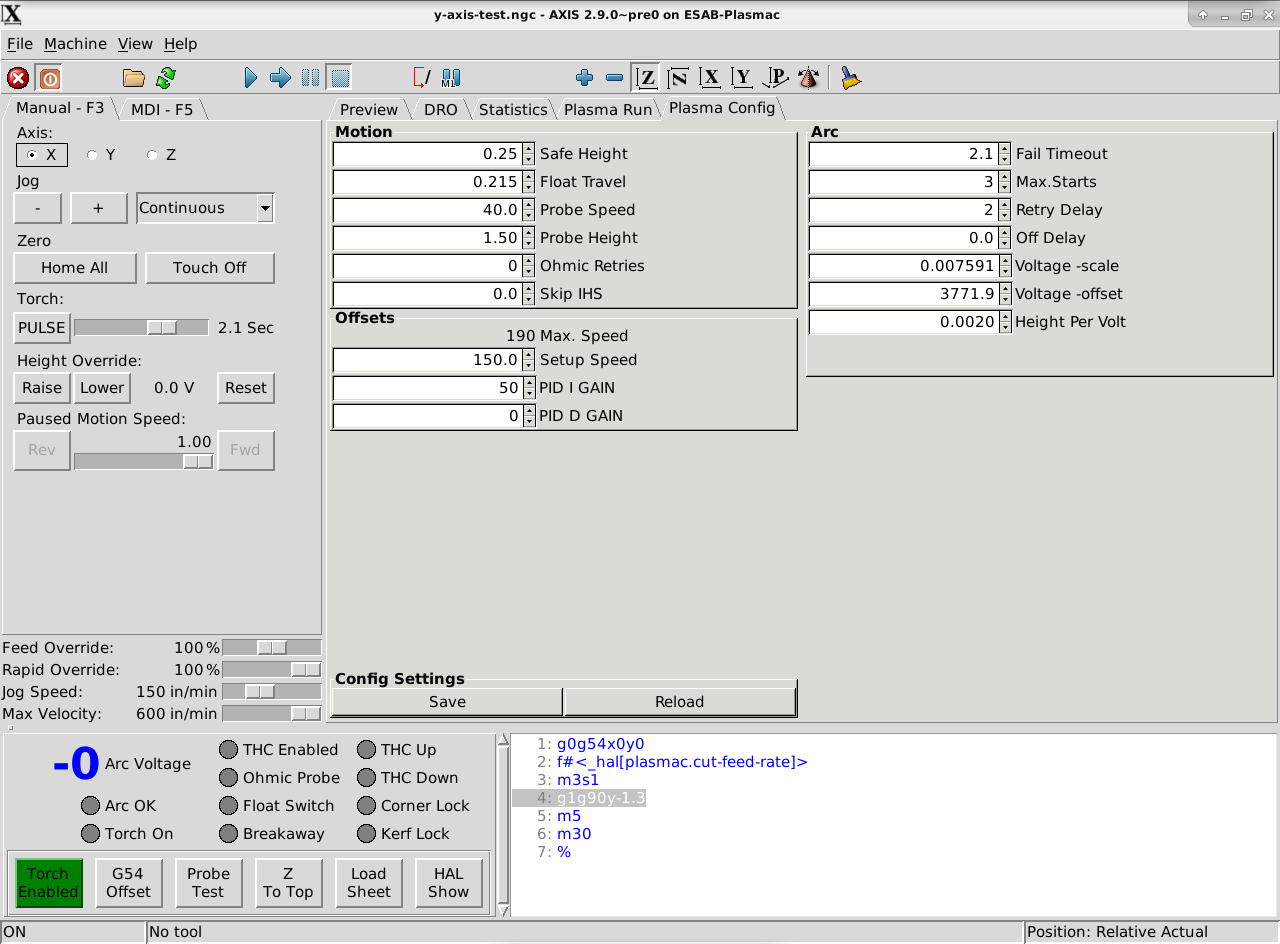
Could you post a shot of your Config tab.
Please Log in or Create an account to join the conversation.
- mkardasi
- Offline
- Senior Member
-
Less
More
- Posts: 48
- Thank you received: 18
01 Jul 2019 03:04 #138280
by mkardasi
Replied by mkardasi on topic Another plasma component...
Of course.
Attachments:
The following user(s) said Thank You: phillc54
Please Log in or Create an account to join the conversation.
- mkardasi
- Offline
- Senior Member
-
Less
More
- Posts: 48
- Thank you received: 18
01 Jul 2019 03:05 #138281
by mkardasi
Replied by mkardasi on topic Another plasma component...
I changed Safe Height to 0.25 see if it resolved the problem and it did not.
The following user(s) said Thank You: phillc54
Please Log in or Create an account to join the conversation.
- phillc54
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2019 04:03 #138283
by phillc54
Replied by phillc54 on topic Another plasma component...
I really have no idea what is happening...
I built a config based on your ini file and still cannot duplicate your problem.
Grasping at straws but..
rename your plasmac_stats.py file to plasmac_stats.py.old or whatever
copy the attached plasmac_stats.py to where the original is
Then see if that makes any difference...
I built a config based on your ini file and still cannot duplicate your problem.
Grasping at straws but..
rename your plasmac_stats.py file to plasmac_stats.py.old or whatever
copy the attached plasmac_stats.py to where the original is
Then see if that makes any difference...
Please Log in or Create an account to join the conversation.
- mkardasi
- Offline
- Senior Member
-
Less
More
- Posts: 48
- Thank you received: 18
01 Jul 2019 22:24 #138334
by mkardasi
That did the trick, Phil.
Replied by mkardasi on topic Another plasma component...
I really have no idea what is happening...
I built a config based on your ini file and still cannot duplicate your problem.
Grasping at straws but..
rename your plasmac_stats.py file to plasmac_stats.py.old or whatever
copy the attached plasmac_stats.py to where the original is
Then see if that makes any difference...
That did the trick, Phil.
The following user(s) said Thank You: phillc54
Please Log in or Create an account to join the conversation.
- phillc54
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 5711
- Thank you received: 2100
01 Jul 2019 23:18 #138348
by phillc54
Replied by phillc54 on topic Another plasma component...
Great, I will push that to master later today.
Please Log in or Create an account to join the conversation.
Moderators: snowgoer540
Time to create page: 2.782 seconds