- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
- meister
- Offline
- Platinum Member
-

Less
More
- Posts: 745
- Thank you received: 465
05 Aug 2024 11:49 #306990
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
@all
how do you implement differential signals?
i wanted to try it now with the AM26LS32, there are also some from MAX but they are extremely expensive
how do you implement differential signals?
i wanted to try it now with the AM26LS32, there are also some from MAX but they are extremely expensive
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

Less
More
- Posts: 17925
- Thank you received: 5251
05 Aug 2024 14:28 #307001
by PCW
Replied by PCW on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
We use 26LS32's a lot for a couple of reasons:
1. Their inputs are protected from up to +-25V
(the more expensive CMOS parts are typically protected to only +-14V or so)
2. Because they are TTL parts the outputs don't swing to 5V and if you add a 1K
pulldown, the outputs are OK for interfacing with most 3.3V chips.
3. They are much cheaper than the CMOS equivalents.
The main disadvantage is higher power consumption
1. Their inputs are protected from up to +-25V
(the more expensive CMOS parts are typically protected to only +-14V or so)
2. Because they are TTL parts the outputs don't swing to 5V and if you add a 1K
pulldown, the outputs are OK for interfacing with most 3.3V chips.
3. They are much cheaper than the CMOS equivalents.
The main disadvantage is higher power consumption
The following user(s) said Thank You: tommylight, meister, Mecanix
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
05 Aug 2024 16:09 #307008
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
thank you PCW !
the Linear Scale works with quadencoder(z) plugin")
but the part from my link is really cheap,
ok for playing around, but to use it properly, hmm, no
the Linear Scale works with quadencoder(z) plugin
but the part from my link is really cheap,
ok for playing around, but to use it properly, hmm, no
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 227
05 Aug 2024 16:36 #307010
by Mecanix
In the other RIO gossips; a brand new journey is about to begin!! However and before I begin routing this I wanted to poke your expertise and ask what would define a half-perfect RIO Motion Control Board. Is there anything fancy that we need on that other than the usual SPINDLE + MPG + XYZAB + Ins & Outs?
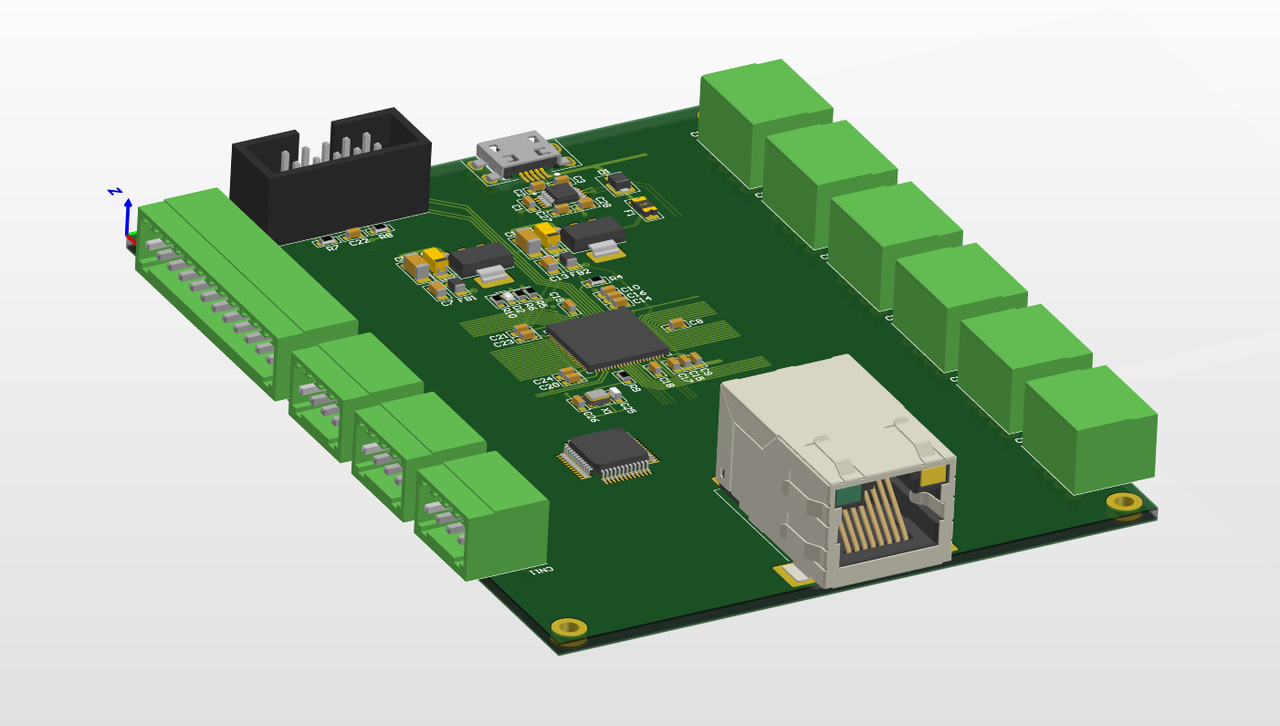
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Haha that's so cool. Their output are indeed identical to those 90deg ABZ rotary encoder. Plugs right in your quadencoderz plugin and so no extra work required!new toy
works like a rotary-encoder, i think it should work in RIO
In the other RIO gossips; a brand new journey is about to begin!! However and before I begin routing this I wanted to poke your expertise and ask what would define a half-perfect RIO Motion Control Board. Is there anything fancy that we need on that other than the usual SPINDLE + MPG + XYZAB + Ins & Outs?
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
05 Aug 2024 21:35 #307034
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Sorry, was busy
@Mecanix
nice board !, but i answer you tomorrow, need sleep now
@Mecanix
nice board !, but i answer you tomorrow, need sleep now
The following user(s) said Thank You: Mecanix
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
06 Aug 2024 05:39 - 06 Aug 2024 06:29 #307058
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
>In the other RIO gossips; a brand new journey is about to begin!! However and before I
>begin routing this I wanted to poke your expertise and ask what would define a half-
>perfect RIO Motion Control Board. Is there anything fancy that we need on that other
>than the usual SPINDLE + MPG + XYZAB + Ins & Outs?
it always depends on the application,
as a universal board, I would say:
4 step/dir
4 inputs (selectable 24V/5V - Proximity Limit Switch)
1 encoder (for lathe / with differantal inputs)
>=3 inputs (for estop/misc)
>=3 outputs (cooling/spindle)
1 MODUS (vfd-spindle)
1 WS2812b (status display / only one pin needed)
1 PMOD header
I really like these connectors: www.reichelt.de/stiftleiste-2-pol-rm-3-5...rank&OFFSET=16&nbc=1
but it's a matter of taste
i think USB/Seriel is not necessary
the fpga on the tangnano20k has the same housing, if the pinout matches you could also use it !?!?!
not the same
EDIT: and it should work with cheap programmer like the USB-Blaster
>begin routing this I wanted to poke your expertise and ask what would define a half-
>perfect RIO Motion Control Board. Is there anything fancy that we need on that other
>than the usual SPINDLE + MPG + XYZAB + Ins & Outs?
it always depends on the application,
as a universal board, I would say:
4 step/dir
4 inputs (selectable 24V/5V - Proximity Limit Switch)
1 encoder (for lathe / with differantal inputs)
>=3 inputs (for estop/misc)
>=3 outputs (cooling/spindle)
1 MODUS (vfd-spindle)
1 WS2812b (status display / only one pin needed)
1 PMOD header
I really like these connectors: www.reichelt.de/stiftleiste-2-pol-rm-3-5...rank&OFFSET=16&nbc=1
but it's a matter of taste
i think USB/Seriel is not necessary
not the same
EDIT: and it should work with cheap programmer like the USB-Blaster
Last edit: 06 Aug 2024 06:29 by meister.
The following user(s) said Thank You: Mecanix
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
06 Aug 2024 07:32 - 06 Aug 2024 07:36 #307059
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
i have noticed that you can also generate verilog with litex without soft-core. and that liteeth also supports UDP in hardware. I think it should be possible to build a UDP interface that runs on the Colorlite boards (and others) and can be integrated into RIO.
There are many supported FPGA's and PHY's: github.com/enjoy-digital/liteeth
There are many supported FPGA's and PHY's: github.com/enjoy-digital/liteeth
Last edit: 06 Aug 2024 07:36 by meister.
Please Log in or Create an account to join the conversation.
- kzali
- Offline
- Junior Member
-

Less
More
- Posts: 35
- Thank you received: 12
06 Aug 2024 07:59 #307060
by kzali
Replied by kzali on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Would the Tang Primer 20k be a good candidatei have noticed that you can also generate verilog with litex without soft-core. and that liteeth also supports UDP in hardware. I think it should be possible to build a UDP interface that runs on the Colorlite boards (and others) and can be integrated into RIO.
There are many supported FPGA's and PHY's: github.com/enjoy-digital/liteeth
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
06 Aug 2024 08:04 #307061
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
unfortunately i don't know much about litex and i don't know if it is supported.
but for the tangprimer20k on the dock ext-board there is already a plugin in RIO:
github.com/multigcs/riocore/tree/dev/riocore/plugins/rmii
but not much tested
but for the tangprimer20k on the dock ext-board there is already a plugin in RIO:
github.com/multigcs/riocore/tree/dev/riocore/plugins/rmii
but not much tested
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
06 Aug 2024 08:13 #307062
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
i tried to generate a simple udp core and the interface looks very simple:
rgmi_* and sys_* are the FPGA-Pins
udp0_sink and udp0_source the data interface for RX and TX
it looks feasible to connect the whole thing to rio
module liteeth_core (
input wire rgmii_clocks_rx,
output wire rgmii_clocks_tx,
input wire rgmii_int_n,
output wire rgmii_mdc,
input wire rgmii_mdio,
output wire rgmii_rst_n,
input wire rgmii_rx_ctl,
input wire [3:0] rgmii_rx_data,
output wire rgmii_tx_ctl,
output wire [3:0] rgmii_tx_data,
input wire sys_clock,
input wire sys_reset,
input wire [31:0] udp0_sink_data,
input wire udp0_sink_last,
output wire udp0_sink_ready,
input wire udp0_sink_valid,
output wire [31:0] udp0_source_data,
output wire udp0_source_error,
output wire udp0_source_last,
input wire udp0_source_ready,
output wire udp0_source_valid
);udp0_sink and udp0_source the data interface for RX and TX
it looks feasible to connect the whole thing to rio
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Time to create page: 0.972 seconds