- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
- Mecanix
- Offline
- Platinum Member
-

Less
More
- Posts: 447
- Thank you received: 228
07 Aug 2024 23:16 #307230
by Mecanix
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
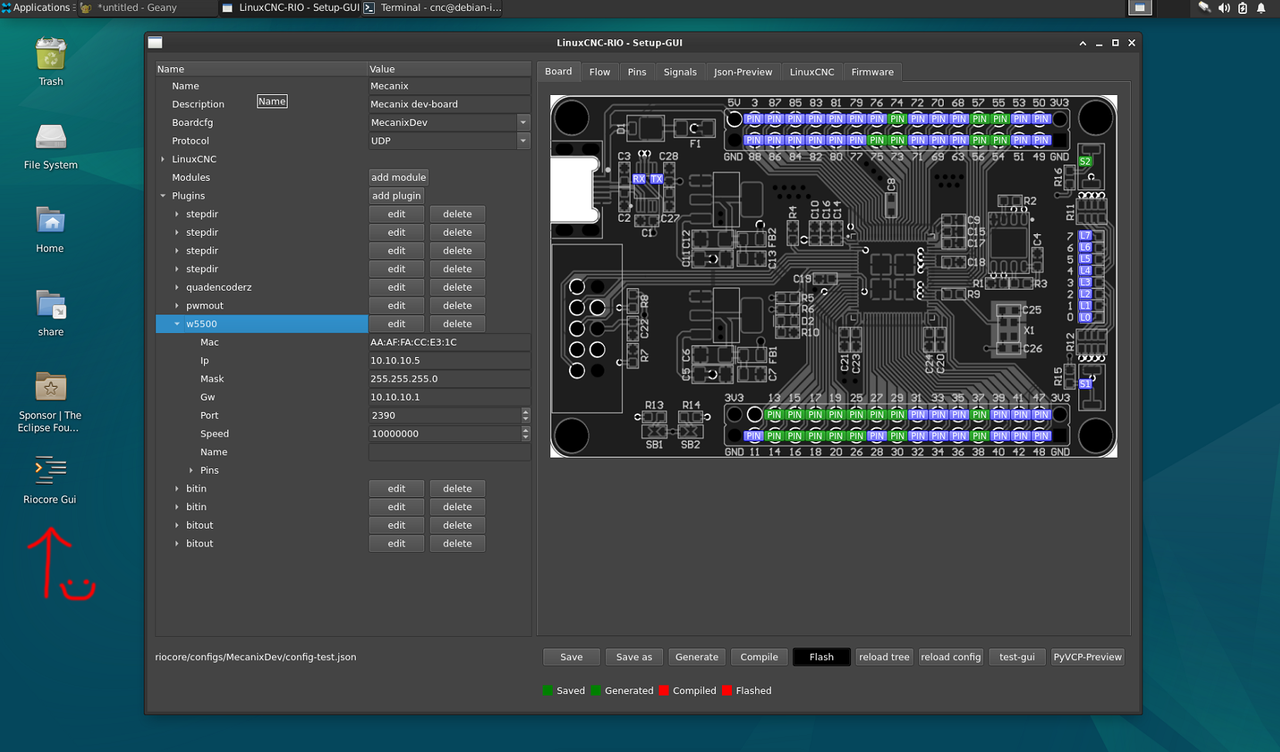
Finally got my Riocore Gui desktop icon working. No more cmd/cli endless keyboard input required. Just double click desktop ico, change stuff, save, generate!!
Change Exec= /to your paths/, save file on your desktop as type "Riocore Gui.desktop"
Change Exec= /to your paths/, save file on your desktop as type "Riocore Gui.desktop"
[Desktop Entry]
Name=Riocore Gui
Comment=Riocore Gui
Exec=bash -i -c "cd ~/rio/riocore; source ~/rio/riocore/bin/activate; PYTHONPATH=. bin/rio-setup riocore/configs/MecanixDev/config-test.json"
Icon=format-indent-less-rtl
Type=Application
Path=
Terminal=false
StartupNotify=falsePlease Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
07 Aug 2024 23:28 #307231
by Mecanix
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
And yet another post!! Because, well, I can and and and and because it's "LinuxCNC-RIO Week!!!"
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 756
- Thank you received: 477
08 Aug 2024 05:55 #307242
by meister
all over 1ms would be to slow because we have 1Khz servo-thread
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
160890 == 0.16ms
Also possible with W5500 on Mac level
No Thank You Very Much. Interesting none the less.
What we currently have is STUPID FAST and high performance already. Unless a mysterious someone has a requirement for an hypersonic motion machine-tool, nobody here (in our star system anyway) will be able to ceiling the perf of RIO as-is on any parts/processes level.
Not sure what you did but after updating the git today I'm clocking this x2 speed of what it was a few days ago. Used to be 2.5ms, now down to little more than a millisecond. Impressive stuff, Olivier.

all over 1ms would be to slow because we have 1Khz servo-thread
The following user(s) said Thank You: Mecanix
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 756
- Thank you received: 477
08 Aug 2024 16:25 #307266
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
sooo, small WARNING, I have now tidied up the boards and configs.
renamed a lot of things and removed all my test files.
if you are missing something, please let me know, i still have everything")
i will shortly merge the dev branch into the main and then also remove the riogui repository (everything is in the riocore)
renamed a lot of things and removed all my test files.
if you are missing something, please let me know, i still have everything
i will shortly merge the dev branch into the main and then also remove the riogui repository (everything is in the riocore)
The following user(s) said Thank You: tommylight, Clive S, Mecanix
Please Log in or Create an account to join the conversation.
- Cant do this anymore bye all
-

- Offline
- Platinum Member
-
Less
More
- Posts: 1200
- Thank you received: 426
09 Aug 2024 06:38 #307292
by Cant do this anymore bye all
Replied by Cant do this anymore bye all on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Sweet will wait for more info.
@Mecanix what's the contents of this file
@Mecanix what's the contents of this file
~/rio/riocore/bin/activatePlease Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
09 Aug 2024 06:39 - 09 Aug 2024 06:44 #307293
by Mecanix
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
@meister
Only when you have time (no rush), I'll need your help with a spindle encoder config. I can make the counter work (A & B signals), however I can't figure out how to make the Z index work. I've attached my config for reference, grateful if you could have a look at it and let me know what I'm doing wrong, or what I'm not doing rather.
ps. only guidance I found was in this thread, from old posts. Although all that info seems to have changed since And so I've tried everything before begging for your help!
And so I've tried everything before begging for your help!
@cornholio
I have no idea. It's a cmd from python-venv (to activate the virtual environment that Rio is isolated into).
Only when you have time (no rush), I'll need your help with a spindle encoder config. I can make the counter work (A & B signals), however I can't figure out how to make the Z index work. I've attached my config for reference, grateful if you could have a look at it and let me know what I'm doing wrong, or what I'm not doing rather.
ps. only guidance I found was in this thread, from old posts. Although all that info seems to have changed since
And so I've tried everything before begging for your help!@cornholio
I have no idea. It's a cmd from python-venv (to activate the virtual environment that Rio is isolated into).
Last edit: 09 Aug 2024 06:44 by Mecanix.
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 756
- Thank you received: 477
09 Aug 2024 06:56 #307294
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
if you want to use the spindle in linuxcnc, the correct hal connections must be entered 'net':
{
"type": "quadencoderz",
"name": "spindle_encoder",
"pins": {
"a": {
"pin": "25",
"pull": "up"
},
"b": {
"pin": "26",
"pull": "up"
},
"z": {
"pin": "27",
"pull": "up"
}
},
"signals": {
"indexenable": {
"net": "spindle.0.index-enable",
"display": {
"type": "none"
}
},
"position": {
"net": "spindle.0.revs",
"scale": 600,
"display": {
"title": "REV"
}
},
"rps": {
"net": "spindle.0.speed-in",
"display": {
"type": "none"
}
}
}
}
The following user(s) said Thank You: Mecanix
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
09 Aug 2024 07:14 - 09 Aug 2024 07:18 #307295
by Mecanix

Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Nice, thanks! Progress ha. But still not getting any index input for some strange reason. The encoder pin pulses HIGH on the oscope on each rev (probed on the FPGA pin), that works fine, but it never shows up in Lcnc. Do I need to debug this from rio.c (hal component?)if you want to use the spindle in linuxcnc, the correct hal connections must be entered 'net':
Last edit: 09 Aug 2024 07:18 by Mecanix.
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
09 Aug 2024 07:33 #307297
by Mecanix
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Wait wait, it see the index pin. I know because if I set the xxx.indexenable to true it trips on a rotation and reset the counter.
Omg, the learning curve is steep, Olivier. Let me try to figure out how this works... prolly going to take me a day or two lool

Omg, the learning curve is steep, Olivier. Let me try to figure out how this works... prolly going to take me a day or two lool
The following user(s) said Thank You: tommylight, meister
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 756
- Thank you received: 477
09 Aug 2024 07:37 #307298
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
you can try
PYTHONPATH=. bin/rio-test riocore/configs/MecanixDev/config.json
-> Quadencoderz and set indexenable, then rotate the axis and look if the indexout changed
same you can do in linuxcnc -> Halshow
set rio.spindle_encoder.indexenable to 1 and look at the rio.spindle_encoder.indexout
while rotating
PYTHONPATH=. bin/rio-test riocore/configs/MecanixDev/config.json
-> Quadencoderz and set indexenable, then rotate the axis and look if the indexout changed
same you can do in linuxcnc -> Halshow
set rio.spindle_encoder.indexenable to 1 and look at the rio.spindle_encoder.indexout
while rotating
The following user(s) said Thank You: Mecanix
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Time to create page: 0.780 seconds