- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
- Dave3891
- Offline
- Senior Member
-

Less
More
- Posts: 56
- Thank you received: 7
30 Dec 2025 19:48 - 30 Dec 2025 19:49 #340735
by Dave3891
Replied by Dave3891 on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
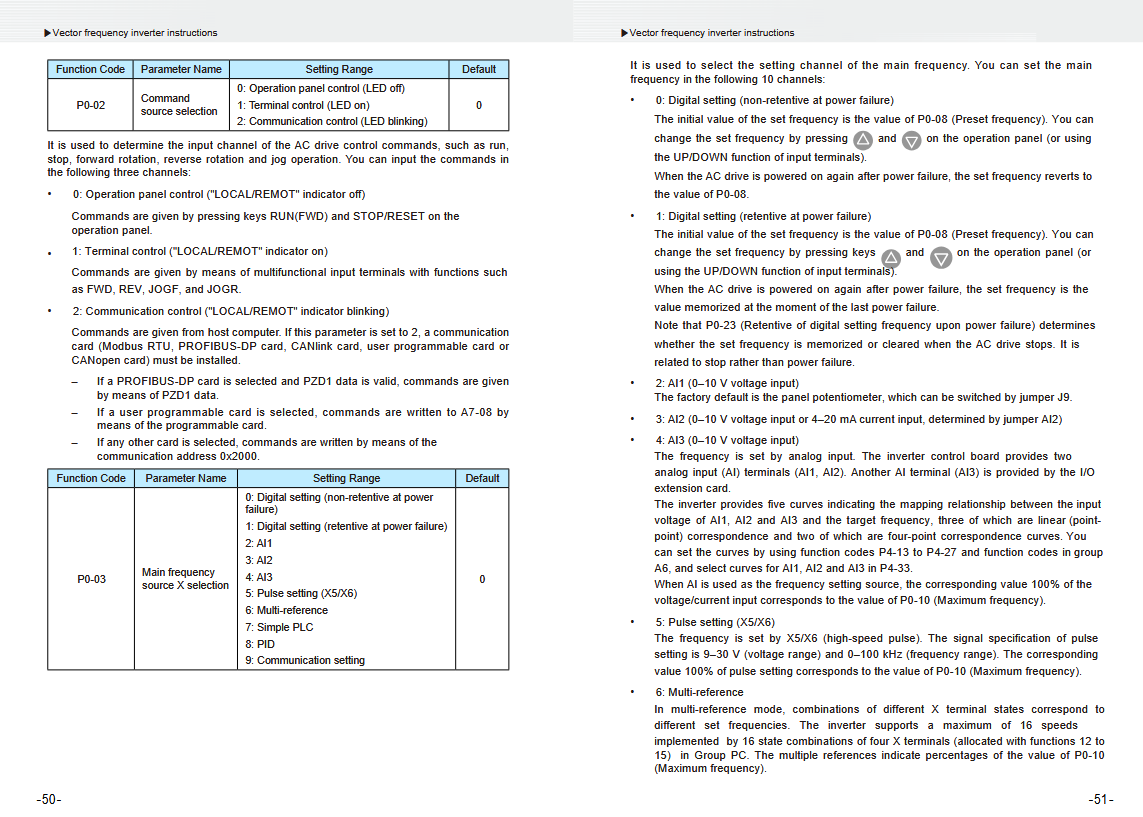
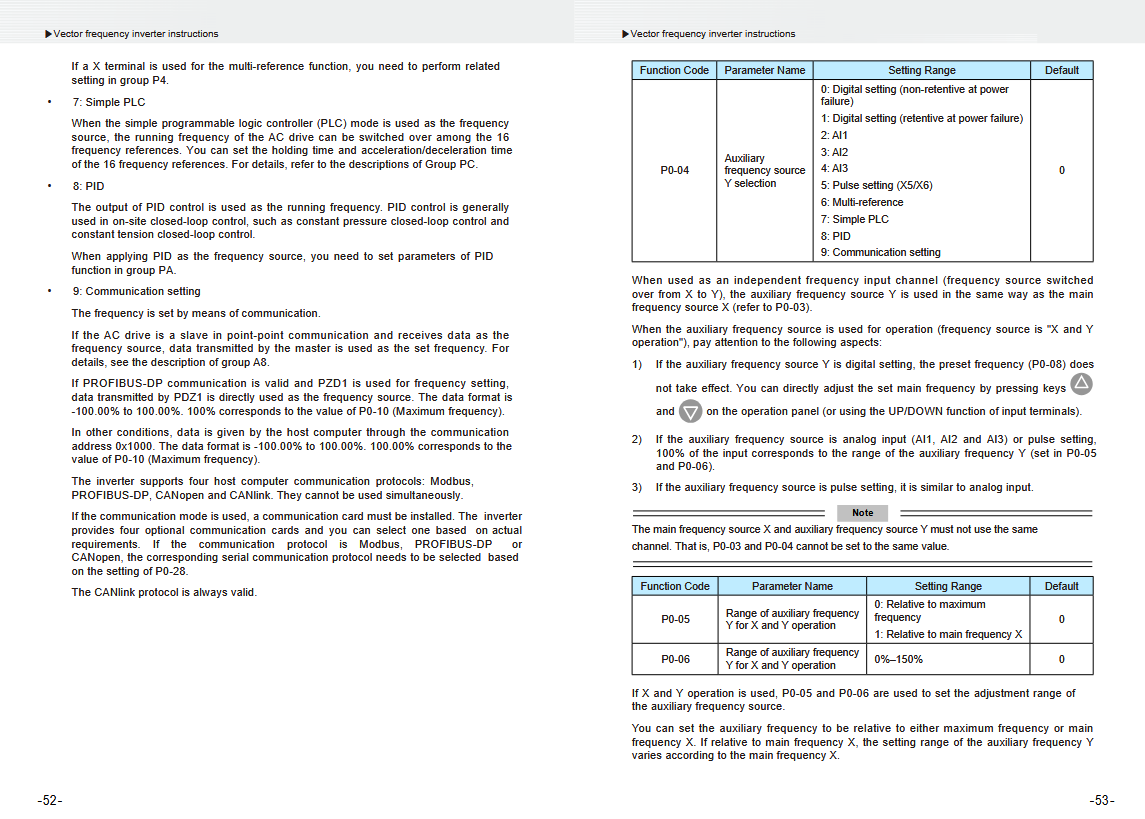
Looking at the manual for this drive I think I can set the control inputs to the terminals and the frequency input to the modbus, I will have to try it later this week.
Attachments:
Last edit: 30 Dec 2025 19:49 by Dave3891.
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-

Less
More
- Posts: 745
- Thank you received: 465
30 Dec 2025 20:47 #340738
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
I still have to port it to the main branch, but it already works in dev.
www.youtube.com/shorts/7ieYCgcRN9Q
www.youtube.com/shorts/7ieYCgcRN9Q
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-
Less
More
- Posts: 56
- Thank you received: 7
30 Dec 2025 21:11 #340741
by Dave3891
Replied by Dave3891 on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Nice! Is that using the rs485 serial output on the RIO board?
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
30 Dec 2025 21:30 - 30 Dec 2025 21:32 #340742
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
I tested it with an IceBreaker board via RS485, but it makes no difference.
for the VFD-Simulation, a USB Modbus adapter is connected to the PC, along with the Python script from above.
for the VFD-Simulation, a USB Modbus adapter is connected to the PC, along with the Python script from above.
Last edit: 30 Dec 2025 21:32 by meister.
Please Log in or Create an account to join the conversation.
- freylax
- Offline
- New Member
-

Less
More
- Posts: 5
- Thank you received: 3
02 Jan 2026 23:44 #340902
by freylax
Replied by freylax on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Dear Oliver,
I got my Setup of RPI5,OlimexICE40EVB working in the test-gui.
(3 stepdir plugins, and some bitinputs) These working all in the test gui.
I did the halcompile step. starting linuxcnc with the created ini configuration.
The linuxcnc app cannot be switched on,
it reports USRMOT: ERROR: command timeout.
I'm a linuxcnc newbe so I would appreciate some hints how I could proceed to get linuxcnc running.
Thank you for your time!
regards Robert
I got my Setup of RPI5,OlimexICE40EVB working in the test-gui.
(3 stepdir plugins, and some bitinputs) These working all in the test gui.
I did the halcompile step. starting linuxcnc with the created ini configuration.
The linuxcnc app cannot be switched on,
it reports USRMOT: ERROR: command timeout.
I'm a linuxcnc newbe so I would appreciate some hints how I could proceed to get linuxcnc running.
Thank you for your time!
regards Robert
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
03 Jan 2026 18:11 #340926
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Hi Robert,
can you please post your json config and maybe the complete error output ?!?
can you please post your json config and maybe the complete error output ?!?
Please Log in or Create an account to join the conversation.
- freylax
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 3
03 Jan 2026 20:31 - 03 Jan 2026 22:34 #340932
by freylax
Replied by freylax on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Hi Oliver, thank you! I post the configuration (json.txt), linuxcnc_print.txt output and a copy of the terminal output linux_cnc_out.txt
I generall I know that I have to do some HAL configuration to (software) wire the machine together. What for the beginning is not so easy to know is what exactly has to be done. I see what your rio-setup does, and there is also the possibility to make linuxcnc HAL net connections in the setup, but what is necessary to start with..
I'm looking forward to hear from you,
regards, Robert
PS: do you run robot os on RPI5 Debian Trixie?
I generall I know that I have to do some HAL configuration to (software) wire the machine together. What for the beginning is not so easy to know is what exactly has to be done. I see what your rio-setup does, and there is also the possibility to make linuxcnc HAL net connections in the setup, but what is necessary to start with..
I'm looking forward to hear from you,
regards, Robert
PS: do you run robot os on RPI5 Debian Trixie?
Last edit: 03 Jan 2026 22:34 by freylax. Reason: added PS
Please Log in or Create an account to join the conversation.
- meister
- Offline
- Platinum Member
-
Less
More
- Posts: 745
- Thank you received: 465
03 Jan 2026 21:35 #340938
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Benutzt du einen RPI5 ?
dann trag mal bitte diese option mit ins json ein:
```
"boardcfg": "Olimex-ICE40HX8K-EVB",
"protocol": "SPI",
"rpi5": true,
"flashcmd": "/home/cnc/prog/olice40prog/spiflash.py -b rio.bin",
```
ansonsten bin ich etwas ratlos.
an welchem CS pin hast du das board ?
per default benutzt RIO CE0 an pin 8:
```
#define SPI_PIN_MOSI 10
#define SPI_PIN_MISO 9
#define SPI_PIN_CLK 11
#define SPI_PIN_CS 8
```
dann trag mal bitte diese option mit ins json ein:
```
"boardcfg": "Olimex-ICE40HX8K-EVB",
"protocol": "SPI",
"rpi5": true,
"flashcmd": "/home/cnc/prog/olice40prog/spiflash.py -b rio.bin",
```
ansonsten bin ich etwas ratlos.
an welchem CS pin hast du das board ?
per default benutzt RIO CE0 an pin 8:
```
#define SPI_PIN_MOSI 10
#define SPI_PIN_MISO 9
#define SPI_PIN_CLK 11
#define SPI_PIN_CS 8
```
Please Log in or Create an account to join the conversation.
- freylax
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 3
03 Jan 2026 22:56 #340944
by freylax
Replied by freylax on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Lieber Oliver,
vielen Dank, die option rpi5:true hat geholfen, jetzt funktioniert die Axis App!
Nun kann ich mich in die Konfiguration vertiefen.
sei lieb gegruesst,
Robert
vielen Dank, die option rpi5:true hat geholfen, jetzt funktioniert die Axis App!
Nun kann ich mich in die Konfiguration vertiefen.
sei lieb gegruesst,
Robert
The following user(s) said Thank You: tommylight, meister
Please Log in or Create an account to join the conversation.
- freylax
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 3
04 Jan 2026 15:43 #340971
by freylax
Replied by freylax on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Lieber Oliver,
ich benoetige noch einmal Deine Aufmerksamkeit. Mir will es nicht so recht gelingen eine vernuenftige Geschwindigkeit und Schritteweite einzustellen.
Ich habe Schrittmotoren welche im Fullstep Mode 60 Schritte fuer eine Umdrehung benoetigen. Eine Undrehung erzeugt einen Vorschub von 5 mm. Wenn ich eine maximale Geschwindigkeit von 5mm/sec einstellen moechte, welche Paramater sind fuer die Stepdir Konfiguration zu setzen? Ich dachte Scale bekommt einen Wert von 12 (60Steps/5mm) = 12 Steps/mm, und MaxVelocity 5(mm/s) - Aber so richtig will es nicht gelingen, der Motor flattert nur...
Ich danke Dir, liebe Gruesse,
Robert
ich benoetige noch einmal Deine Aufmerksamkeit. Mir will es nicht so recht gelingen eine vernuenftige Geschwindigkeit und Schritteweite einzustellen.
Ich habe Schrittmotoren welche im Fullstep Mode 60 Schritte fuer eine Umdrehung benoetigen. Eine Undrehung erzeugt einen Vorschub von 5 mm. Wenn ich eine maximale Geschwindigkeit von 5mm/sec einstellen moechte, welche Paramater sind fuer die Stepdir Konfiguration zu setzen? Ich dachte Scale bekommt einen Wert von 12 (60Steps/5mm) = 12 Steps/mm, und MaxVelocity 5(mm/s) - Aber so richtig will es nicht gelingen, der Motor flattert nur...
Ich danke Dir, liebe Gruesse,
Robert
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Time to create page: 0.227 seconds