5Axis Kinetic from 2.8 on 2.7x
- JackRay
- Offline
- Elite Member
-

- Posts: 226
- Thank you received: 14
Is this normal?
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
in the .ini file that I posted to me, there are connections
in the [HAL] section which I don't have in my .ini file.
Reassure me, is it just for simulation, or is it necessary to make the machine work properly ??
Thank you
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

- Posts: 4734
- Thank you received: 2121
I'm going to try, I just can only drive the A or C, A & C axes with a G1 F50, if I move X or Y nothing happens, no movement of the A or C axes.
Is this normal?
That is normal.
Reassure me, is it just for simulation, or is it necessary to make the machine work properly ??
That is just for simulation.
[edit]
I really think you should play around with the simulation that is included in your installation. There you can jog the axis and see how it is supposed to work. There are even some example gcodes.
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
I will install the similation.
I also that my problem can come from the fact that I start linuxcnc in "TCP" mode and do my origins and the G54 X0 Y0 Z0 A0 C0.
I have to do my origins in "trivial" mode (trivkins and not in xyzac-trt-kins).
For that you have to program "M" codes, like "M128" to activate "TCP" & "M129" to deactivate it.
I found the docs, but I don't know where to write these little programs in the linux tree.
Best Regards
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4734
- Thank you received: 2121
For that you have to program "M" codes, like "M128" to activate "TCP" & "M129" to deactivate it.
To use those M codes you need a version of LinuxCNC that allows switching kinematics. This functionality has not been merged with the main branch of linuxcnc. So in order to install that you will need to do a RIP (Run in Place) install of dewey garretts switchkins branch. This will require you to compile and build linuxcnc from source.
Here is his guide: www.panix.com/~dgarrett/stuff/s_kins_guide.txt
Further information:
www.panix.com/~dgarrett/stuff/switchkins.html
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
I do not have the necessary level to do this (compliation / branch ??).

however, I saw that I could use the M66 / M68 to change the type of kinematics and synchronization of the axes.
all this with the subroutine call.
subroutine call as I have already used for the automatic measurement of my tool length.
Is it correct ?
Thank you
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4734
- Thank you received: 2121
This is, by the way, also why I got to learn how do a RIP install. It's really not all that difficult. One just has to sit down and try.
Really all that's needed is described in the link above:
2) To get the source code and build LinuxCNC, see:
linuxcnc.org/docs/master/html/code/building-linuxcnc.html
Learn how to build the default (master) branch first.
You must succeed with this before proceding.
3) To build a specific branch (like dgarr/s_kins):
$ cd ~/linuxcnc-dev/src
$ git checkout dgarr/s_kins # checkout branch
$ git branch | grep \* # show current branch
$ git log --oneline -1 # show the current commit
$ make && sudo make setuid # build current branch
$ source ../scripts/rip-environment # set environment
$
$ # go to sim directory:
$ cd ../configs/sim/axis/vismach/5axis/table-rotary-tilting
$ linuxcnc xyzac-trt-kins.ini # run a sim
$ # experiment with gui
You've got a nice machine, would be a shame.
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
it starts well I do not have the files attached in my tree structure ...
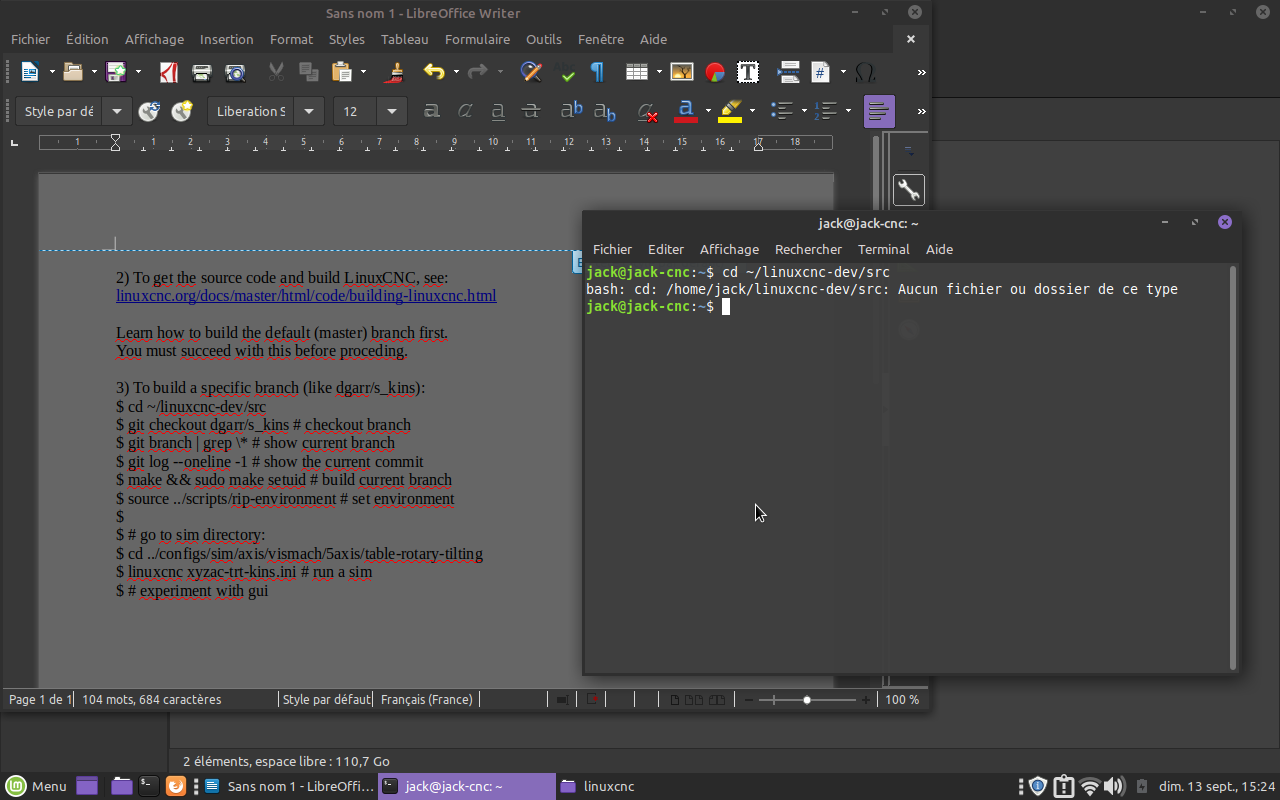
Attachments:
Please Log in or Create an account to join the conversation.
- JackRay
- Offline
- Elite Member
-
- Posts: 226
- Thank you received: 14
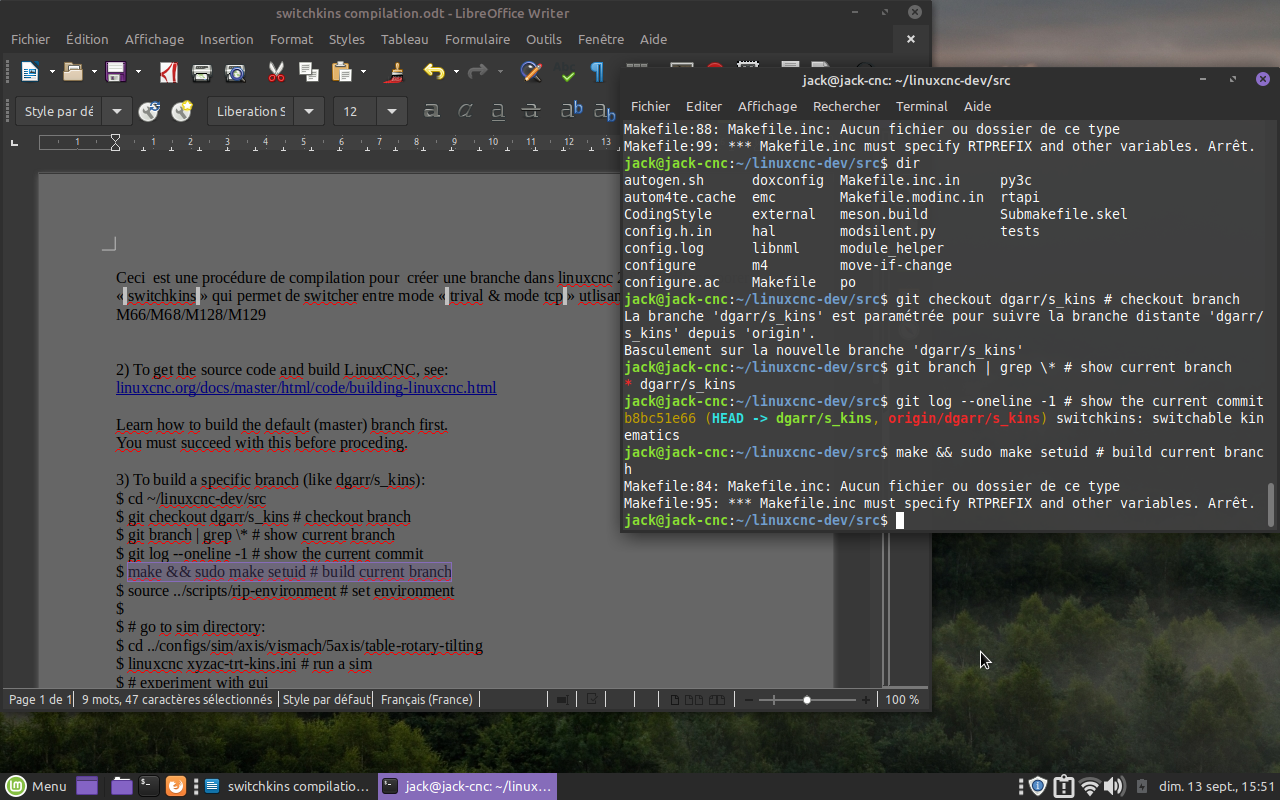
but the error ??
thank you very much, but without you it's impossible to do it.
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-
- Offline
- Administrator
-
- Posts: 4734
- Thank you received: 2121
2) To get the source code and build LinuxCNC, see:
linuxcnc.org/docs/master/html/code/building-linuxcnc.html
Learn how to build the default (master) branch first.
You must succeed with this before proceding.
There you need to first try this:

It this fails, as it probably will, you will need to install the missing dependencies.
Maybe this helps: (I have not actually watched the whole thing)
Attachments:
Please Log in or Create an account to join the conversation.